完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > DM642

DM642全名TMS320DM642是TI公司C6000系列DSP中最新的定點DSP,其核心是C6416型高性能數字信號處理器,具有極強的處理性能,高度的靈活性和可編程性,同時外圍集成了非常完整的音頻、視頻和網絡通信等設備及接口,特別適用于機器視覺、醫學成像、網絡視頻監控、數字廣播以及基于數字視頻/圖像處理的消費類電子產品等高速DSP應用領域。
DM642全名TMS320DM642是TI公司C6000系列DSP中最新的定點DSP,其核心是C6416型高性能數字信號處理器,具有極強的處理性能,高度的靈活性和可編程性,同時外圍集成了非常完整的音頻、視頻和網絡通信等設備及接口,特別適用于機器視覺、醫學成像、網絡視頻監控、數字廣播以及基于數字視頻/圖像處理的消費類電子產品等高速DSP應用領域。筆者針對市場客戶的需求,設計并實現了一款以TVP5150為視頻輸入解碼器,以PCM1801為音頻輸入采集電路,以TMS320DM642型DSP為核心處理器的多路視頻采集兼壓縮處理PCI板卡,并將其應用于構建高穩定性、高魯棒性和多媒體數字監控系統,取得了較好的社會效益和經濟效益。
DM642全名TMS320DM642是TI公司C6000系列DSP中最新的定點DSP,其核心是C6416型高性能數字信號處理器,具有極強的處理性能,高度的靈活性和可編程性,同時外圍集成了非常完整的音頻、視頻和網絡通信等設備及接口,特別適用于機器視覺、醫學成像、網絡視頻監控、數字廣播以及基于數字視頻/圖像處理的消費類電子產品等高速DSP應用領域。筆者針對市場客戶的需求,設計并實現了一款以TVP5150為視頻輸入解碼器,以PCM1801為音頻輸入采集電路,以TMS320DM642型DSP為核心處理器的多路視頻采集兼壓縮處理PCI板卡,并將其應用于構建高穩定性、高魯棒性和多媒體數字監控系統,取得了較好的社會效益和經濟效益。
硬件架構
TMS320DM642采用第二代高性能、先進的超長指令字veloci T1.2結構的DSP核及增強的并行機制,當工作在720M赫茲的時鐘頻率下,其處理性能最高可達5760MI/s,使得該款DSP成為數字媒體解決方案的首選產品,它不僅擁有高速控制器的操作靈活性,而且具有陣列處理器的數字處理能力,TMS320DM642的外圍集成了非常完整的音頻、視頻和網絡通信接口。
主要構成
3個可配置的視頻端口(VPORT0-2)能夠與通用的視頻編、解碼器實現無縫連接,支持多種視頻分辨率及視頻標準,支持RAW視頻輸入/輸出,傳輸流模式;
1個10/100Mb/s以太網接口(EMAC),符合IEEE 802.3標準;
1個多通道帶緩沖音頻串行端口(McASP),支持I2S,DIT,S/PDIF,IEC60958-1,AES-3、CP-430等音頻格式;
2個多通道帶緩沖串行端口(McBSP),采用RS232電平驅動;
1個VCXO內插控制單元(VIC),支持音/視頻同步;
1個32位、66M赫茲、3.3V主/從PCI接口,遵循PCI2.2規范;
1個用戶可配置的16/32主機接口(HPI);
1個16位通用輸入/輸出端口(GPIO);
1個64位外部存儲器接口(EMIF),能夠與大多數異步存儲器(SRAM、EPROM)及同步存儲器(SDRAM,SBSRAM,ZBT SRAM,FIFO)無縫連接,最大可尋址外部存儲器空間為1024MB;
1個具有64路獨立通道的增強型直接內存訪問控制器(EDMA);
1個數據管理輸入/輸出模塊(MDIO);
1個I2C總線模塊;
3個32位通用定時器;
1個符合IEEE 1149.1標準的JTAG接口及子板接口等。
DM642學習筆記(程序注釋)
用的是瑞泰創新的實驗箱(ICETEK-DM642-IDK-M),主要是視頻處理部分的程序注釋及思考題思路及一些不成熟的見解~~
實驗5.6-5.19 視頻驅動程序應用
DM642視頻驅動程序的注釋:
/*
* Copyright 2003 by Texas Instruments Incorporated.
* All rights reserved. Property of Texas Instruments Incorporated.
* Restricted rights to use, duplicate or disclose this code are
* granted through contract.
*
*/
/* “@(#) DDK 1.10.00.23 07-02-03 (ddk-b12)” */
#include 《std.h》 //如果使用C語言,必須將此文件作為第一個頭文件
#include 《tsk.h》
#include 《sem.h》
#include 《gio.h》
#include 《csl_dat.h》
#include 《csl_cache.h》//使用CSL庫,要用到的一些頭文件,可參考CSL
#include 《fvid.h》//視頻驅動頭文件
#include 《edc.h》
#include 《vport.h》
#include 《vportcap.h》
#include 《vportdis.h》
#include 《saa7105.h》
#include 《saa7115.h》
#include 《evmdm642.h》//芯片頭文件
#include “colorbar.h”//如果顯示彩色滾動條,就必須有此頭文件;否則不需要
#include “evmdm642_vcapparams.h”
#include “evmdm642_vdisparams.h”
/* heap IDs defined in the BIOS configuration file */
extern Int EXTERNALHEAP;//??DSP/BIOS?????¨??
/*
* ======== main ========
*/
main()
{
/******************************************************/
/* open CSL DAT module for fast copy */
/******************************************************/
CSL_init(); //調用任何CSL庫中的函數,必須先在此調用函數
CACHE_clean(CACHE_L2ALL, 0, 0); //清洗Cache模式
CACHE_setL2Mode(CACHE_256KCACHE); //設置Cache模式
CACHE_enableCaching(CACHE_EMIFA_CE00); //使能EMIFA CE0空間
CACHE_enableCaching(CACHE_EMIFA_CE01); //使能EMIFA CE1空間
DAT_open(DAT_CHAANY, DAT_PRI_LOW, DAT_OPEN_2D); //打開數據傳輸
}
/*
* ======== tskVideoLoopback ========
* video loopback function.
*/
void tskVideoLoopback()
{
Int i;
int m_nWork;
Int status;
FVID_Handle disChan; //設置設備句柄
Int frames = 0;
FVID_Frame *disFrameBuf;
Int numLinesDis = EVMDM642_vDisParamsChan.imgVSizeFld1;
//設置顯示的行數,VGA為480,PAL為576
Int numLinesCap =EVMDM642_vCapParamsChan.fldYStop1 - //設置采集行數
EVMDM642_vCapParamsChan.fldYStrt1+1;
/*判斷是顯示區域大,還是采集區域大,取其小者*/
Int numLines = (numLinesDis 》 numLinesCap) ? numLinesCap : numLinesDis;
#ifdef _LOOPBACK
FVID_Handle capChan;
/*設置每行顯示的像素數,PAL制為720*/
Int numPixels = EVMDM642_vCapParamsChan.fldXStop1 -
EVMDM642_vCapParamsChan.fldXStrt1+1;
FVID_Frame *capFrameBuf;
/*設置采集圖像一行的總像素*/
Int capLinePitch = EVMDM642_vCapParamsChan.fldXStop1 -
EVMDM642_vCapParamsChan.fldXStrt1+1;
/*設置顯示圖像一行的總像素*/
Int disLinePitch = EVMDM642_vDisParamsChan.imgHSizeFld1;
#ifdef _PIP
VPORTCAP_Params EVMDM642_vCapParamsChan2 = EVMDM642_vCapParamsChan;
FVID_Handle capChan2;
FVID_Frame *capFrameBuf2;
Int yPitch = capLinePitch 》》 1;
Int cPitch = ((capLinePitch 》》 2) + 7) & (~ 7);
#endif
#endif
numLines *= 2; /* both fields */如果輸出為PAL制,前面numLinesCap不要*2,這里再*2?
/******************************************************/
/* allocate both capture and display frame buffers */
/* in external heap memory */
/******************************************************/
/*分配采集和顯示圖像的存放緩沖區*/
EVMDM642_vCapParamsChan.segId = EXTERNALHEAP;
EVMDM642_vDisParamsChan.segId = EXTERNALHEAP;
EVMDM642_vDisParamsSAA7105.hI2C = EVMDM642_I2C_hI2C;
EVMDM642_vCapParamsSAA7115.hI2C = EVMDM642_I2C_hI2C;
/******************************************************/
/* initialization of capture driver */
/******************************************************/
/*建立并初始化采集設備對象*/
#ifdef _LOOPBACK
capChan = FVID_create(“/VP0CAPTURE/A/0”,
IOM_INPUT, &status, (Ptr)&EVMDM642_vCapParamsChan, NULL);
#ifdef _PIP
EVMDM642_vCapParamsChan2.scale = VPORT_SCALING_ENABLE;
EVMDM642_vCapParamsChan2.fldOp = VPORT_FLDOP_FLD1;
EVMDM642_vCapParamsChan2.thrld 》》=1;
capChan2 = FVID_create(“/VP1CAPTURE/A/1”,
IOM_INPUT, &status, (Ptr)&EVMDM642_vCapParamsChan2, NULL);
#endif
#endif
/******************************************************/
/* initialization of display driver */
/******************************************************/
/*建立并初始化顯示設備對象*/
disChan = FVID_create(“/VP2DISPLAY”, IOM_OUTPUT,
&status, (Ptr)&EVMDM642_vDisParamsChan, NULL);
/******************************************************/
/* configure video encoder & decoder */
/******************************************************/
for ( m_nWork=0;m_nWork《6;m_nWork++ )//這里的循環有何用???一直沒有弄清楚
{
/*為保證采集和顯示設備正常工作,為其設置驅動*/
FVID_control(disChan, VPORT_CMD_EDC_BASE + EDC_CONFIG,
(Ptr)&EVMDM642_vDisParamsSAA7105);
#ifdef _LOOPBACK
FVID_control(capChan, VPORT_CMD_EDC_BASE + EDC_CONFIG,
(Ptr)&EVMDM642_vCapParamsSAA7115);
#ifdef _PIP
EVMDM642_vCapParamsSAA7115.aFmt = SAA7115_AFMT_COMPOSITE;
FVID_control(capChan2, VPORT_CMD_EDC_BASE+EDC_CONFIG,
(Ptr)&EVMDM642_vCapParamsSAA7115);
#endif
#endif
}
/******************************************************/
/* start capture & display operation */
/******************************************************/
/*開始采集和顯示操作*/
FVID_control(disChan, VPORT_CMD_START, NULL);
#ifdef _LOOPBACK
FVID_control(capChan, VPORT_CMD_START, NULL);
#ifdef _PIP
FVID_control(capChan2, VPORT_CMD_START, NULL);
#endif
#endif
/********************************************************/
/* request a frame buffer from display & capture driver */
/********************************************************/
/*分配采集和顯示一幀圖像存放的緩沖區*/
FVID_alloc(disChan, &disFrameBuf);
#ifdef _LOOPBACK
FVID_alloc(capChan, &capFrameBuf);
#ifdef _PIP
FVID_alloc(capChan2, &capFrameBuf2);
#endif
#endif
frames ++;
while(1){/* loop forever */
#ifdef _LOOPBACK
/* copy data from capture buffer to display buffer */
/***************************************************/
/*將采集緩沖區的內容復制到顯示緩沖區*/
for(i = 0; i 《 numLines; i ++) {
DAT_copy(capFrameBuf-》frame.iFrm.y1 + i * capLinePitch,
disFrameBuf-》frame.iFrm.y1 + i * disLinePitch,
numPixels);
DAT_copy(capFrameBuf-》frame.iFrm.cb1 + i * (capLinePitch 》》 1),
disFrameBuf-》frame.iFrm.cb1 + i * (disLinePitch 》》 1),
numPixels》》1);
DAT_copy(capFrameBuf-》frame.iFrm.cr1 + i * (capLinePitch 》》 1),
disFrameBuf-》frame.iFrm.cr1 + i * (disLinePitch 》》 1),
numPixels》》1);
}
#ifdef _PIP
for(i = 0; i 《 (numLines》》1); i ++) {
DAT_copy(capFrameBuf2-》frame.iFrm.y1 + i * yPitch,
disFrameBuf-》frame.iFrm.y1 + i * disLinePitch
+ (disLinePitch 》》 1),
(numPixels》》1));
DAT_copy(capFrameBuf2-》frame.iFrm.cb1 + i * cPitch,
disFrameBuf-》frame.iFrm.cb1 + i * (disLinePitch 》》 1)
+ (disLinePitch 》》2 ),
(numPixels 》》 2));
DAT_copy(capFrameBuf2-》frame.iFrm.cr1 + i * cPitch,
disFrameBuf-》frame.iFrm.cr1 + i * (disLinePitch 》》 1)
+(disLinePitch 》》 2),
(numPixels 》》 2));
}
#endif
DAT_wait(DAT_XFRID_WAITALL);
FVID_exchange(capChan, &capFrameBuf);//采集一幀圖像
#ifdef _PIP
FVID_exchange(capChan2, &capFrameBuf2);
#endif
#else //如果定義CAPTURE則填充圖像緩沖區為8條帶
fillFrmBuf(&disFrameBuf-》frame.iFrm, EVMDM642_vDisParamsChan.imgHSizeFld1,
EVMDM642_vDisParamsChan.imgVSizeFld1
+ EVMDM642_vDisParamsChan.imgVSizeFld2,
frames % 360);
#endif
FVID_exchange(disChan, &disFrameBuf);//將顯示緩沖區中一幀圖像送給顯示設備
frames ++; //處理下一幀圖像
}
}
實驗5.20 視頻圖像處理-取反
1.將程序改成屏幕1/4進行取反,而其他不變
在主程序中ICETEKDM642PCIImageProcessReverse()函數前加if(i《(numLines/2)),即:
if(i《(numLines/2))
ICETEKDM642PCIImageProcessReverse();
并將ICETEKDM642PCIImageProcessReverse()函數中的循環體改為如下:
for ( i=0;i《720/2;i++ )
nMemTemp[i]=~nMemTemp[i];
2.例程中處理了亮度信號,以下是處理色差信號:
for ( i = 0; i 《 numLines; i ++ )
{
m_nID=DAT_copy(capFrameBuf-》frame.iFrm.cb1+i*(capLinePitch》》1),nMemTemp,numPixels》》1);
DAT_wait(m_nID);
ICETEKDM642PCIImageProcessReverse();
DAT_copy(nMemTemp,disFrameBuf-》frame.iFrm.cb1+i*(disLinePitch》》1),numPixels》》1);
for ( m_nWork=0;m_nWork《numPixels》》1;m_nWork++ )
nMemTemp[m_nWork]=0x080;
DAT_copy(nMemTemp,disFrameBuf-》frame.iFrm.y1+i*disLinePitch,numPixels); DAT_copy(nMemTemp,disFrameBuf-》frame.iFrm.cr1+i*(disLinePitch》》1),numPixels》》1);
}
出現的問題:圖像顯示時右半屏有閃爍???~~~
實驗5.21 視頻圖像處理-直方圖統計
程序注釋:源程序中定義的js變量不知為何用,于是就刪除了~~~
#include “ICETEK-DM642-PCI.h”
//工作變量
#pragma DATA_SECTION(nMemTemp, “.INTPROCBUFF”);
#pragma DATA_ALIGN(nMemTemp,128);
unsigned char nMemTemp[720];
#pragma DATA_SECTION(nHisto, “.INTPROCBUFF”);
#pragma DATA_ALIGN(nHisto,128);
unsigned int nHisto[256];
unsigned char imgHisto[HISTOHIGH*HISTOWIDTH];//128*256
int mi,mj,m_nWork1;
unsigned int m_nWork,*pWork;
unsigned char *pImg,*pImg1;
void ICETEKDM642PCIBoardInit()//直方圖顯示區域初始化
{
for ( mi=0;mi《HISTOHIGH*HISTOWIDTH;mi++ )
imgHisto[mi]=1;
for ( mi=0;mi《256;mi++ )
nHisto[mi]=0;
}
#pragma CODE_SECTION(ICETEKDM642PCIStatistic,“.text1”)
void ICETEKDM642PCIStatistic()//統計一幀圖像的直方圖
{
int i;
for ( i=0;i《720;i++ )
{
nHisto[nMemTemp[i]]++;
}
}
#pragma CODE_SECTION(ICETEKDM642PCIHistogram,“.text1”)
void ICETEKDM642PCIHistogram()//將統計的一幀圖像的直方圖顯示在顯示區域上
{
m_nWork=0;
for ( mi=0;mi《256;mi++ )//找出各灰度級別像素總數最大的
if ( m_nWork《nHisto[mi] )
m_nWork=nHisto[mi];
m_nWork/=(HISTOHIGH-1);//求出比例因子(即像素總數最大值/顯示區域的高度)
for ( mi=0;mi《256;mi++ )//轉換各灰度級,將其映射到顯示區域(即:各個灰度級的像素/比例因子)
{
nHisto[mi]/=m_nWork;
}
for ( mi=0;mi《HISTOHIGH*HISTOWIDTH;mi++ )//將顯示區域置白
imgHisto[mi]=1;
pImg = imgHisto; //pImg指針指向顯示區域首地址
pImg += ((HISTOHIGH-1)*HISTOWIDTH); //mImg指針指向顯示區域尾地址
pImg++;//???
for ( mi=1;mi《255;mi++,pImg++ )
{
for ( mj=0,pImg1=pImg;mj《nHisto[mi];mj++,pImg1-=HISTOWIDTH )
(*pImg1)=HISTOCOLOR;//對應的顯示區域填充顏色,這里還是不太明白
}
for ( mi=0;mi《256;mi++ ) //清除直方圖統計的數組
nHisto[mi]=0;
}
實驗5.22 視頻圖像處理-直方圖均衡化增強
程序注釋:直方圖均衡化,其實質是圖像增強的一種。
#include “math.h”
#include “ICETEK-DM642-PCI.h”
//工作變量
#pragma DATA_SECTION(nMemTemp, “.INTPROCBUFF”);
#pragma DATA_ALIGN(nMemTemp,128);
unsigned char nMemTemp[720];
#pragma DATA_SECTION(fHisto, “.INTPROCBUFF”);
#pragma DATA_ALIGN(fHisto,128);
float fHisto[256];//
#pragma DATA_SECTION(lut, “.INTPROCBUFF”);
#pragma DATA_ALIGN(lut,128);
unsigned char lut[256];//保存新的灰度級,是通過上一幀圖像計算的
int mi,mj,m_nWork1;
unsigned int m_nWork,*pWork,js;
unsigned char *pImg,*pImg1;
float m_fWork;
void ICETEKDM642PCIBoardInit()
{
js=0;
for ( mi=0;mi《256;mi++ )
{
fHisto[mi]=0.0f;
lut[mi]=0;
}
}
#pragma CODE_SECTION(ICETEKDM642PCIStatistic,“.text1”)
void ICETEKDM642PCIStatistic()
{
int i;
for ( i=0;i《720;i++ )
{
fHisto[nMemTemp[i]]++;//統計灰度直方圖
nMemTemp[i]=lut[nMemTemp[i]];//新的灰度級映射(通過上一幀圖像計算出的新灰度級,處理這一幀圖像)
}
}
#pragma CODE_SECTION(ICETEKDM642PCIHistogramEnhance,“.text1”)
void ICETEKDM642PCIHistogramEnhance()//
{
m_fWork=720*576; fHisto[0]/=m_fWork;
for ( mi=1;mi《256;mi++ )//灰度直方圖頻率
{
fHisto[mi]/=m_fWork;
fHisto[mi]+=fHisto[mi-1];
}
for ( mi=0;mi《256;mi++ )//計算新的灰度級
{
m_fWork=fHisto[mi];
m_fWork*=255;
lut[mi]=(unsigned char)m_fWork;//這就是新的灰度級
}
for ( mi=0;mi《256;mi++ )//灰度直方圖數組清0
fHisto[mi]=0.0f;
}
實驗5.23 視頻圖像處理-中值濾波
中值濾波算法實質是一種圖像噪聲的抑制。該系統實現中值濾波算法速度極慢。
實驗5.24 視頻圖像處理-邊緣檢測(Sobel算子)
Sobel算子實質是圖像的銳化處理,主要目的是突出圖像中的細節或者增強被模糊了的細節。
但是對這個算法程序實現不是很明白。
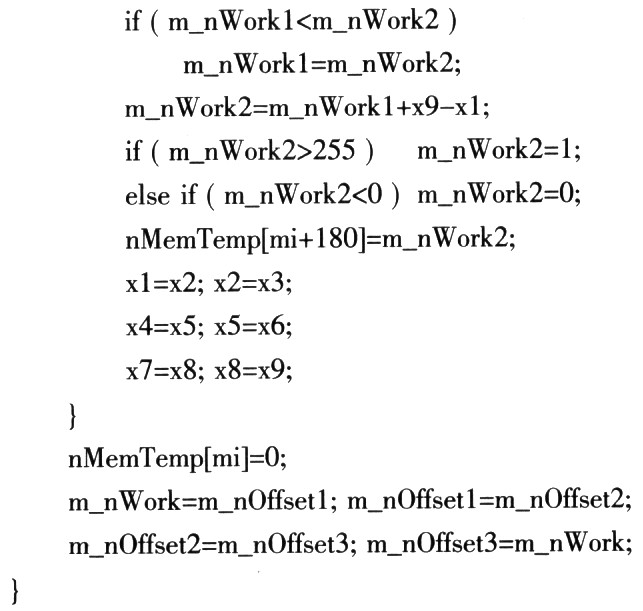
for ( mi=0;mi《MWIDTH;mi++,pImg1++,pImg2++,pImg3++ )
{
x3=(*pImg1); x6=(*pImg2); x9=(*pImg3);
m_nWork1=x7+x8+x8-x2-x2-x3;
m_nWork2=x3+x6+x6-x4-x4-x7;
if ( m_nWork1《m_nWork2 )////對這個算法的程序實現不是很明白
m_nWork1=m_nWork2;
m_nWork2=m_nWork1+x9-x1;
if ( m_nWork2》255 ) m_nWork2=255;
else if ( m_nWork2《0 ) m_nWork2=0;
nMemTemp[mi+180]=m_nWork2;
x1=x2; x2=x3;
x4=x5; x5=x6;
x7=x8; x8=x9;
}
實驗5.25 視頻圖像處理-傅立葉變換
對傅立葉變換的知識比較空白。壓根沒看懂~~~
實驗5.26 視頻圖像處理-色彩空間變換
程序注釋:
void ICETEKDM642PCIYUVRGB()
{
int i,j;
int r,g,b,y,u,v;
unsigned char *py,*pu,*pv,*pr,*pg,*pb;
py=m_dbFrameY; pu=m_dbFrameU; pv=m_dbFrameV;
pr=m_dbTargetImageR; pg=m_dbTargetImageG; pb=m_dbTargetImageB;
for ( i=0;i《SIMGHEIGHT;i++ )
{
for ( j=0;j《SIMGWIDTH;j+=2 ) ////列720點,360個32bit,
{
u=(*pu); v=(*pv); y=(*py);
u-=128; v-=128;
r=y+1.402*u;
g=y-0.34414*u-0.71414*v;
b=y+1.772*v;
if ( r》255 ) r=255;
else if ( r《0 ) r=0;
if ( g》255 ) g=255;
else if ( g《0 ) g=0;
if ( b》255 ) b=255;
else if ( b《0 ) b=0;
(*pr)=r; pr++;
(*pg)=g; pg++;
(*pb)=b; pb++;
py++; y=(*py);
r=y+1.402*u;
g=y-0.34414*u-0.71414*v;
b=y+1.772*v;
if ( r》255 ) r=255;
else if ( r《0 ) r=0;
if ( g》255 ) g=255;
else if ( g《0 ) g=0;
if ( b》255 ) b=255;
else if ( b《0 ) b=0;
(*pr)=r; pr++;
(*pg)=g; pg++;
(*pb)=b; pb++;
py++; pu++; pv++;
}
}
}
////在計算機中,用RGB方式描述一個像素需要R、G、B共3個字節。而用YUV方式描述,則對于每2個像素,Y用2個字節,U取相同的值,用一個字節,V取相同的值,
////用一個字節,平均每個像素2個字節。理解了這一點,對于上面的程序就理解了~~~

基于TMS320DM642嵌入式圖像識別方案實現車流量檢測系統的設計
現有的傳統視頻檢測方法基于工控機,其算法成熟,且已形成相關產品。但其也有缺點:一是由于通用CPU沒有專用的硬件乘法器,故很難實現圖像的時實性處理。二是采...
視頻終端的核心是圖像的數字化處理模塊。基于PC機的數字視頻處理,給出了算法研究的途徑,而基于高速DSP的應用模塊才提供了實時嵌入式視頻處理的可能。然而,...

本文主要介紹的就是基于DM642的視頻采集處理系統中I2C模塊的正確初始化,以及通過I2C總線正確地對視頻解碼芯片SAA7115的寄存器讀/寫程序。

以DM642為核心,設計了一款智能視頻分析系統,支持標清視頻。采用模塊化設計,通過視頻智能分析,對目標實現了檢測、識別、跟蹤及預警功能。

目前的安防監控領域的主流產品是DVR(數字硬盤錄像機),它的主要特點是適合監控點集中的局域監控應用。但是,隨著對于遠程分布式監控需求的增長,嵌入式網絡...
本文介紹了5/3提升小波變換及其在DM642上的實現。在通用的DSP芯片上實現該算法具有很好的可擴展性、可升級性與易維護性。用這種方式靈活性強,完全能滿...

系統研究并實現了一個通用的基于DM642的視頻處理系統。該系統已經調試成功,它可以完成視頻信號的輸入與輸出,可以應用于視頻圖象采集和處理的各種場合中

介紹了一種采用DM642和CPLD相配合的擴展鍵盤方法。CPLD管理鍵盤電路中的芯片邏輯,DM642的外部中斷監控按鍵的狀態。簡單闡述了鍵盤的分類,給出...

摘 要: 選用TMS320DM642 作為系統CPU ,并采用最新視頻編碼標準H. 264 壓縮算法, 實現基于CDMA 網絡傳輸的無線視頻監控和視頻數...
1 前言 DM642 (TMS320DM642)型處理器是TI最新推出的面向多媒體處理領域的數字信號處理器(DSP).給多媒體設備的實現提供了...
TMS320DM642是TI公司推出的一款針對視頻和圖像處理領域應用的數字多媒體處理芯片,具有處理能力強和集成度高等特點,是目前實現H.264視頻編碼器...
DM642作為高性能的視頻處理芯片,被廣泛應用到視頻處理的很多領域,但是DM642的I2C應用容易遇到I2C、VP等死鎖,以及
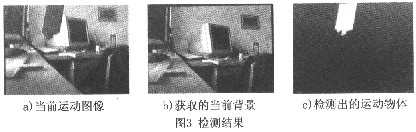
引言 數字視頻系統在智能交通、圖像識別以及安防監控等領域,都得到了廣泛的應用,運動目標檢測作為數字視頻系統的一個重要環節,是后續目標識別、目
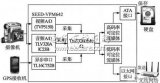
地理信息系統( GIS)、全球定位系統( GPS)的廣泛應用使人們享受到了基于位置服務所帶來的諸多便利。傳統G IS 是以地圖為可視化主要手段, 然而人...
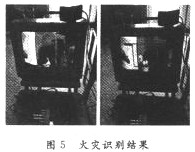
引言 火災是最常見的嚴重災害之一,它往往給人們的生命財產造成巨大的危害。目前用于火焰探測的主要有煙感探測器、紅外探測器、紫外探測器等,但這些

介紹了一種新型的多媒體DSP處理器DM642的結構和功能,總結了開發DM642系統的應用技術和方法,并給出了基于DM642的視頻監控系統實例。
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1

