完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > imu
IMU( 中文名為即時通)是新一代開放式IM(即時通訊)的首創者, 引領中國即時通信發展的新潮流。
文章:218個 瀏覽:45678次 帖子:63個
慣性導航系統(Inertial Navigation System,Ins),顧名思義,是利用慣性定律,來進行位姿推算的導航系統。

視覺慣性融合技術應用于機器人和自動駕駛方面。單目相機和低成本IMU成為最佳選擇。因為VIO系統的高度非線性,初值對視覺慣性系統很重要,但很難獲得精確的初始狀態。
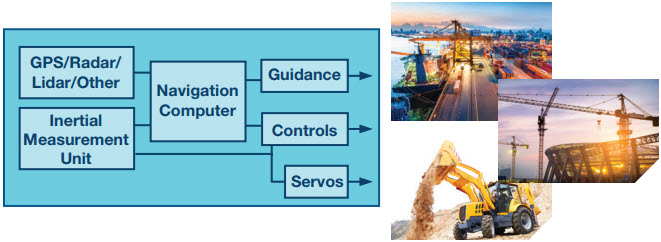
無論是在制造業、農業、物流業、能源業、汽車業還是無人機行業,機械自動化都有望顯著提高資源效率、設備精度和安全性。為實現這些效益,關鍵是找出合適的檢測技術...
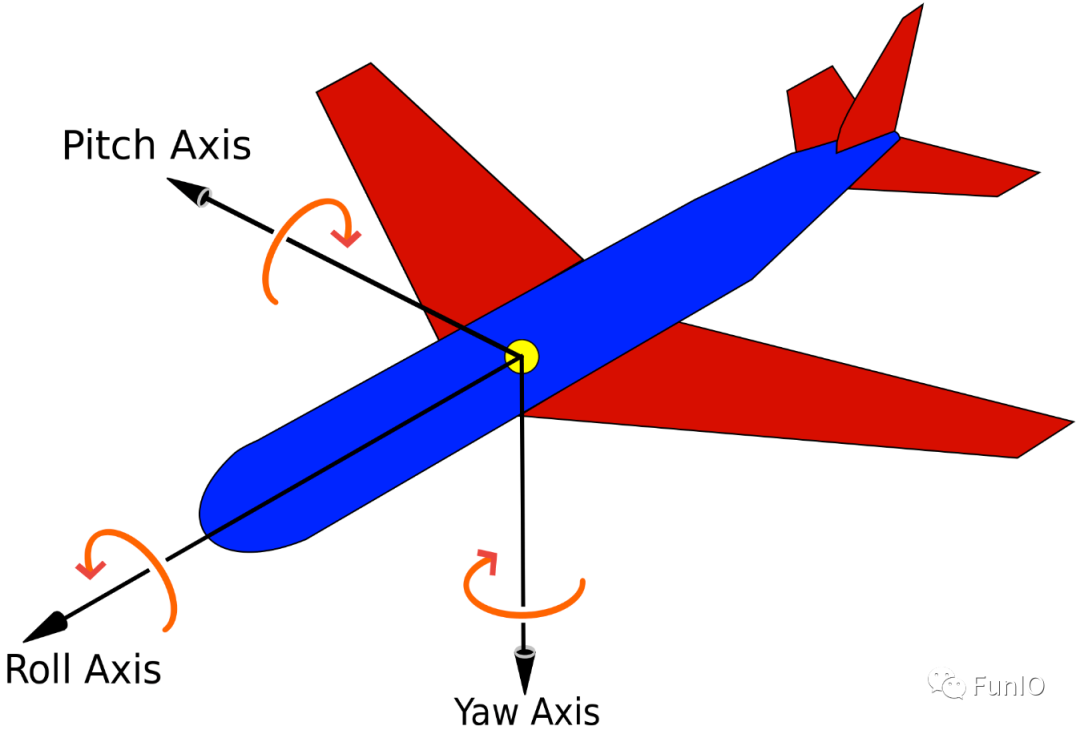
在飛行器的控制中,姿態計算是至關重要的一步。姿態計算的目標是確定飛行器相對于參考坐標系的姿態,通常以歐拉角(滾轉、俯仰和偏航)或四元數的形式表示。
LeGO-LOAM全稱為:Lightweight and Groud-Optimized Lidar Odometry and Mapping on V...
2023-06-11 標簽:激光雷達IMUCortex-A57 1444 0

受簡化慣性傳感器系統(RISS)[23]的啟發,我們開發了視覺慣性車輪里程計(VIWO)。具體而言,我們將MSCKF中的系統模型重新設計為3DRISS,...

傳感器是不是即插即用?并不是,傳感器接入硬件,需要首先對它們進行校準(標定),來提高數據準確度。
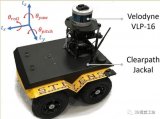
移動機器人需要一種對環境干擾具有魯棒性的可靠位姿估計器,為此,慣性測量單元(IMU)發揮了重要作用,因為它們可以獨立感知車輛的全運動狀態。

在閱讀論文 《A Robust and Easy to Implement Method for IMU Calibration without Ext...
摘要:本文主要分析輪式移動機器人的通用里程計模型,并以兩輪差速驅動機器人的里程計計算為案例,給出簡化后的兩輪差速驅動機器人里程計模型。
精確狀態估計是自主機器人的基礎問題。為了實現局部精確且全局無漂移的狀態估計,通常將具有互補性質的多傳感器融合到一起。
隨著激光雷達的上車數量的不斷攀升,如何用好激光雷達成為了重中之重,而用好激光雷達的關鍵點之一就在于處理好點云數據。
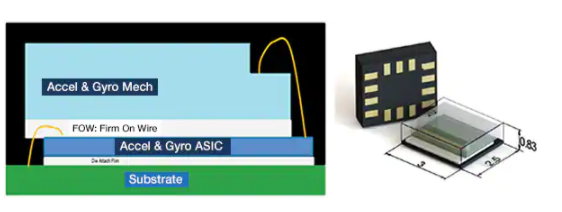
IMU:Inertial Measurement Unit,即慣性測量單元。它是由三軸加速計、三軸陀螺儀、三軸磁力計等多種傳感器組成的模塊。 IM...
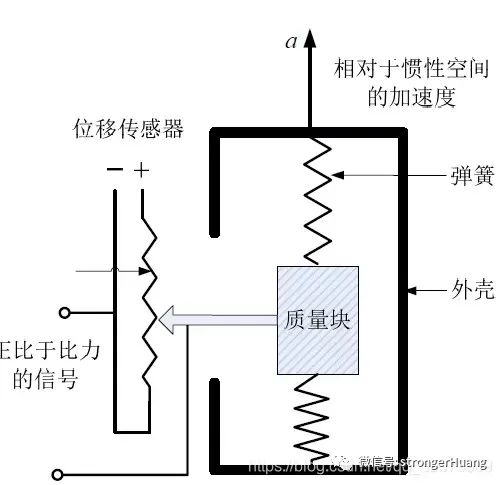
壓阻式:壓阻式加速度傳感器的質量塊在加速度的慣性力作用下發生位移,使固定在懸臂梁上的壓敏電阻發生形變,通過測試電阻的變化量,可以得到加速度的大小。
隨著物聯網的發展,無人機對物聯網技術的運用不斷增加,為了能更好的控制無人機的飛行,各種傳感器的運用則起到了十分重要的作用。
隨著自動駕駛技術越來多地被人們所提及,相關的技術也在不斷的發展,各類高精度定位、傳感等技術得到了長足的發展,而其中有一個冉冉升起的新星,那就是IMU技術。
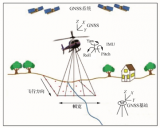
IMU提供相對定位信息,并不能提供所在具體位置信息,因此,高精度的IMU與GNSS導航系統二者組合使用,可以獲取絕對位置的信息,避免車輛在信號失效的情況...
設備激活至少兩秒后,傾斜改變至少 35 度時,此事件就生成中斷。 傾斜功能可用于不同場景。 例如,手機放在口袋中,當手機持有者從坐姿變為站立或從站立變為...
利用歐拉角與旋轉矩陣來對陀螺儀與加速度計的原始數據進行姿態求解
加速度計測量的是其感受到的加速度,在靜止的時候,其本身是沒有加速運動的,但因為重力加速度的作用,根據相對運動理論,其感受的加速度與重力加速度正好相反,即...
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1