完善資料讓更多小伙伴認(rèn)識(shí)你,還能領(lǐng)取20積分哦,立即完善>
標(biāo)簽 > pid
PID=port ID,在STP(生成樹協(xié)議)中,若在端口收到的BPDU中BID和path cost相同時(shí),則比較PID來選擇阻塞端口。數(shù)字電視復(fù)用系統(tǒng)名詞 PID(Packet Identifier) 在數(shù)字電視復(fù)用系統(tǒng)中它的作用好比一份文件的文件名,我們可以稱它為“標(biāo)志碼傳輸包” 。
文章:602個(gè) 瀏覽:85306次 帖子:784個(gè)
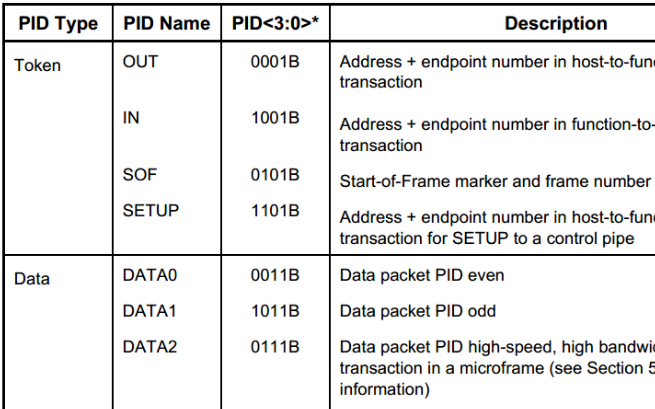
揭秘USB報(bào)文的結(jié)構(gòu)與運(yùn)作機(jī)制
握手包在一個(gè)字節(jié)的數(shù)據(jù)字段后由EOP定界如果一個(gè)數(shù)據(jù)包在解碼為握手包的情況下,在一個(gè)字節(jié)后沒有以EOP結(jié)束,它必須被視為無效并被接收器忽略
2024-04-10 標(biāo)簽:通信協(xié)議usb數(shù)據(jù)傳輸 1840 0
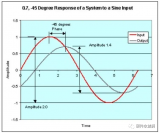
為了保證系統(tǒng)在閉環(huán)控制下能穩(wěn)定,一般要求系統(tǒng)的相位裕度大于45°。當(dāng)系統(tǒng)的幅值裕度為0,相位裕度為0就會(huì)發(fā)生自激振蕩,在控制上是不穩(wěn)定系統(tǒng)。
PID,就是“比例(proportional)、積分(integral)、微分(derivative)”,是一種很常見的控制算法。 PID已經(jīng)有1...
2024-03-18 標(biāo)簽:傳感器發(fā)動(dòng)機(jī)單片機(jī) 1.0萬 0

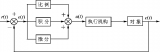
控制模塊可以分為控制邏輯和控制算法兩大部分,邏輯用于處理各種輸入輸出的選擇、切換等,算法是輸入輸出具體關(guān)系的數(shù)學(xué)表示。
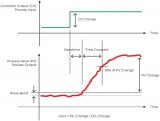
PID控制基于反饋。測(cè)量設(shè)備或過程的輸出,并將其與目標(biāo)或設(shè)定值進(jìn)行比較。如果檢測(cè)到差異,則計(jì)算并實(shí)施校正。再次測(cè)量輸出,并重新計(jì)算任何必要的校正。
pwm占空比和電壓的關(guān)系 pid輸出和pwm占空比怎么聯(lián)系
PWM(脈寬調(diào)制)指的是通過改變周期內(nèi)的高電平時(shí)長來調(diào)整信號(hào)的占空比。占空比是指高電平時(shí)長與周期時(shí)長的比值,常用百分比來表示。PWM的主要應(yīng)用是在調(diào)速控...
PID(Proportional-Integral-Derivative,比例-積分-微分)是一種控制算法,用于調(diào)整控制系統(tǒng)的輸出以使其與預(yù)期的參考輸入...
2024-02-02 標(biāo)簽:控制器PID工業(yè)自動(dòng)化 1.3萬 0
什么是pid控制原理 pid各個(gè)參數(shù)對(duì)系統(tǒng)的影響
PID(Proportional-Integral-Derivative)控制是一種常見的控制算法,廣泛應(yīng)用于工業(yè)過程控制、機(jī)器人控制、自動(dòng)駕駛等領(lǐng)域。...
在工程實(shí)際中,應(yīng)用最為廣泛的調(diào)節(jié)器控制規(guī)律為比例、積分、微分控制,簡(jiǎn)稱PID控制,又稱PID調(diào)節(jié)。它以其結(jié)構(gòu)簡(jiǎn)單、穩(wěn)定性好、工作可靠、調(diào)整方便而成為工業(yè)...
功能模塊包括通訊模塊、定位模塊、脈沖輸出模塊、高速計(jì)數(shù)模塊、PID控制模塊、溫度控制模塊等。選擇PLC時(shí)應(yīng)考率到功能模塊配套的可能性,選擇功能模塊涉及硬...

x就是當(dāng)前值currentValue和目標(biāo)值totalValue的差值,簡(jiǎn)稱誤差err,則err = currentValue - totalValue...
變頻器的核心參數(shù)有哪些 變頻器常用的調(diào)速方式
PID(比例-積分-微分)控制是一種常見的閉環(huán)調(diào)速方式,通過監(jiān)測(cè)電動(dòng)機(jī)轉(zhuǎn)速,將轉(zhuǎn)速信號(hào)反饋給變頻器進(jìn)行調(diào)節(jié)。根據(jù)轉(zhuǎn)速偏差的大小,變頻器自動(dòng)調(diào)整輸出頻率,...
2024-01-18 標(biāo)簽:變頻器電動(dòng)機(jī)過流保護(hù) 1041 0
在計(jì)算機(jī)科學(xué)中,PID(進(jìn)程標(biāo)識(shí)符)是一個(gè)用于唯一標(biāo)識(shí)運(yùn)行中的進(jìn)程的整數(shù)值。PID主要具有以下三個(gè)參數(shù)作用: 進(jìn)程創(chuàng)建:PID參數(shù)用于在操作系統(tǒng)中創(chuàng)建新...
2024-01-16 標(biāo)簽:計(jì)算機(jī)操作系統(tǒng)PID 1.2萬 0
介紹下Linux的3個(gè)常用I/O相關(guān)命令,解決I/O壓力過大問題時(shí)用iostat,查看磁盤的I/O狀態(tài)用iotop,查看I/O進(jìn)程排名用lsof
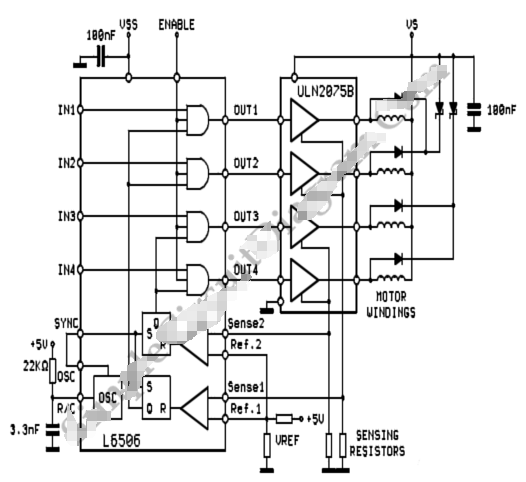
控制器是指按照預(yù)定順序改變主電路或控制電路的接線和改變電路中電阻值來控制電動(dòng)機(jī)的啟動(dòng)、調(diào)速、制動(dòng)和反向的主令裝置。由程序計(jì)數(shù)器、指令寄存器、指令譯碼器、...
2024-01-10 標(biāo)簽:電路圖驅(qū)動(dòng)器控制器 2268 0
很多玩開源飛控的人,安裝驅(qū)動(dòng),端口,刷固件,校準(zhǔn)傳感器都不是啥問題,而且關(guān)于這些以及安裝,甚至遙控器設(shè)置,網(wǎng)上都有人教。唯獨(dú)一個(gè)PID調(diào)試基本是讓人最頭...
伺服系統(tǒng)應(yīng)用的五個(gè)注意事項(xiàng)!
電流環(huán)的給定和“電流環(huán)的反饋”值進(jìn)行比較后的差值,在電流環(huán)內(nèi)做 PID 調(diào)節(jié)輸出給電機(jī),“電流環(huán)的輸出”就是電機(jī)的每相的相電流。
2023-12-28 標(biāo)簽:PID數(shù)控系統(tǒng)伺服系統(tǒng) 590 0

PID自動(dòng)控制回路的振蕩問題與應(yīng)對(duì)方法
在工業(yè)自動(dòng)化控制領(lǐng)域,PID自動(dòng)控制回路的應(yīng)用非常廣泛。然而,在使用過程中,我們常常會(huì)遇到各種振蕩問題,如同相位振蕩、異相位振蕩和非平滑振蕩等。這些問題...
2023-12-28 標(biāo)簽:PID自動(dòng)控制振蕩 1.5萬 0

在很多控制算法當(dāng)中,PID控制算法又是最簡(jiǎn)單,最能體現(xiàn)反饋思想的控制算法,可謂經(jīng)典中的經(jīng)典。經(jīng)典的未必是復(fù)雜的,經(jīng)典的東西常常是簡(jiǎn)單的,而且是最簡(jiǎn)單的。
stm32 usb 主機(jī)發(fā)送 pid in的原理和實(shí)現(xiàn)方法
STM32是一款常用的微控制器系列,它具有廣泛的應(yīng)用領(lǐng)域,包括工業(yè)控制、汽車電子、消費(fèi)電子等。其中,STM32同時(shí)支持USB主機(jī)和設(shè)備功能,使得它在與其...
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題
| 電機(jī)控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動(dòng)駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機(jī) | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機(jī) | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進(jìn)電機(jī) | SPWM | 充電樁 | IPM | 機(jī)器視覺 | 無人機(jī) | 三菱電機(jī) | ST |
| 伺服電機(jī) | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1