完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > 相位

相位(phase)是對于一個波,特定的時刻在它循環中的位置:一種它是否在波峰、波谷或它們之間的某點的標度。相位描述信號波形變化的度量,通常以度 (角度)作為單位,也稱作相角。
相位(phase)是對于一個波,特定的時刻在它循環中的位置:一種它是否在波峰、波谷或它們之間的某點的標度。相位描述信號波形變化的度量,通常以度 (角度)作為單位,也稱作相角。 當信號波形以周期的方式變化,波形循環一周即為360° 。相位常應用在科學領域,如數學、物理學等。例如:在函數y=Acos(ωx+φ)中,ωx+φ稱為相位。在astrolog32中點擊ALT+SHIFT+A可以顯示相位設定菜單。在交流電中,相位是反映交流電任何時刻的狀態的物理量。交流電的大小和方向是隨時間變化的。比如正弦交流電流,它的公式是i=Isin2πft。i是交流電流的瞬時值,I是交流電流的最大值,f是交流電的頻率,t是時間。隨著時間的推移,交流電流可以從零變到最大值,從最大值變到零,又從零變到負的最大值,從負的最大值變到零。在三角函數中2πft相當于弧度,它反映了交流電任何時刻所處的狀態,是在增大還是在減小,是正的還是負的等等。因此把2πft叫做相位,或者叫做相。
相位(phase)是對于一個波,特定的時刻在它循環中的位置:一種它是否在波峰、波谷或它們之間的某點的標度。相位描述信號波形變化的度量,通常以度 (角度)作為單位,也稱作相角。 當信號波形以周期的方式變化,波形循環一周即為360° 。相位常應用在科學領域,如數學、物理學等。例如:在函數y=Acos(ωx+φ)中,ωx+φ稱為相位。在astrolog32中點擊ALT+SHIFT+A可以顯示相位設定菜單。在交流電中,相位是反映交流電任何時刻的狀態的物理量。交流電的大小和方向是隨時間變化的。比如正弦交流電流,它的公式是i=Isin2πft。i是交流電流的瞬時值,I是交流電流的最大值,f是交流電的頻率,t是時間。隨著時間的推移,交流電流可以從零變到最大值,從最大值變到零,又從零變到負的最大值,從負的最大值變到零。在三角函數中2πft相當于弧度,它反映了交流電任何時刻所處的狀態,是在增大還是在減小,是正的還是負的等等。因此把2πft叫做相位,或者叫做相。
相位調整
(phase adjustment)。指在有些超低音音箱上加裝的一個控制機構。用于對超低音音箱所重放出的聲音稍許加以延遲,從而讓超低音音箱的輸出能夠和前置主音箱同相位,即具有相同的時間關系。
相位噪聲
是頻率域的概念。相位噪聲是對信號時序變化的另一種測量方式,其結果在頻率域內顯示。如果沒有相位噪聲,那么振蕩器的整個功率都應集中在頻率f=fo處。但相位噪聲的出現將振蕩器的一部分功率擴展到相鄰的頻率中去,產生了邊帶(sideband)。從圖2中可以看出,在離中心頻率一定合理距離的偏移頻率處,邊帶功率滾降到1/fm,fm是該頻率偏離中心頻率的差值。相位噪聲通常定義為在某一給定偏移頻率處的dBc/Hz值,其中,dBc是以dB為單位的該頻率處功率與總功率的比值。一個振蕩器在某一偏移頻率處的相位噪聲定義為在該頻率處1Hz帶寬內的信號功率與信號的總功率比值。
相位差
兩個頻率相同的交流電相位的差叫做相位差,或者叫做相差。這兩個頻率相同的交流電,可以是兩個交流電流,可以是兩個交流電壓,可以是兩個交流電動勢,也可以是這三種量中的任何兩個。例如研究加在電路上的交流電壓和通過這個電路的交流電流的相位差。如果電路是純電阻,那么交流電壓和交流電流的相位差等于零。也就是說交流電壓等于零的時候,交流電流也等于零,交流電壓變到最大值的時候,交流電流也變到最大值。這種情況叫做同相位,或者叫做同相。如果電路含有電感和電容,交流電壓和交流電流的相位差一般是不等于零的,也就是說一般是不同相的,或者電壓超前于電流,或者電流超前于電壓。加在晶體管放大器基極上的交流電壓和從集電極輸出的交流電壓,這兩者的相位差正好等于180°。這種情況叫做反相位,或者叫做反相。簡諧運動中的相位差:如果兩個簡諧運動的頻率相等,其初相位分別是φ1,φ2。當φ2》φ1時,他們的相位差是△φ=(ωt+φ2)-(ωt+φ1)=φ2-φ1此時我們常說2的相位比1超前△φ。
正弦交流電的相位、初相(角)和相位差
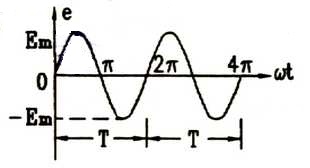
前面兩節課中所講到的如上圖所示的波形圖是一種特定波形:即t=0時,e=0。
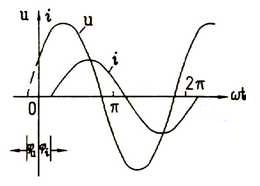
而實際中,t=0時,e不一定為零,如右圖所示:因此,一般正弦交流量的瞬時表達式應為:
e=Emsin(ωt+Φe)
u=Umsin(ωt+Φu)
i=Imsin(ωt+Φi)
相位、初相和相位差
上述公式中(ωt+Φ)稱為正弦量的相位,它是表示正弦量變化進程的物理量。例如:當相位ωt+Φ=90°,e=Em,當(ωt+Φ)=180°時,e=0,如此等等。可見,相位隨時間不斷變化,電動勢e也就不斷變化。由于相位是用電角度表示的,所以也稱相位角。
公式中Φ稱為正弦量的初相角。它是t=0時的相位角,簡稱初相。
在交流電路中經常要進行同頻率正弦量之間相位的比較(比如電壓和電流之間)。同頻率正弦量的相位之差稱為相位差,用△Φ表示。在上右圖中,電壓u與電流i的相位差為:
△Φ=(ωt+Φu)-(ωt+Φi)=Φu-Φi
即為兩正弦量初相之差。雖然相位是時間的函數,但相位差則是不隨時間而變化的常數。
如果兩同頻率正弦量的初相相等,相位差為零,我們稱它們同相,即它們同時達到正或負的最大值,同事到達零值;如果它們的相位差等于±π(180°),則稱它們是反相,即它們在任意瞬時方向總是相反的;如果它們的相位不同,相位差不等于零,則稱在本格周期內誰先達到最大值的正弦量比后到達同方向最大值的正弦量是超前的,或稱后者滯后于前者,也就是初相大的超前初相小的。在上右圖中u超前于i,即u比i先到達最大值。
學習進階
應當指出:在比較兩個正弦量的相位時,其超前或滯后的角度,習慣上不應大于180°。而對于不同頻率的正弦量,就不能用相位差來比較,因為這時相位差將隨時間而變化。
例題:試計算下列u與i在t=0時的數值u0及i0;并比較其相位關系,已知:
u=311sin(ωt+30°)伏;
i=5sin(ωt-30°)安;
解:當t=0時:
u0=311sin(0+30°)=311sin30°=155.5伏;
i0=5sin(0-30°)=5sin(-30°)=-2.5安;
u與i的相位差:
△Φ=(ωt+30°)-(ωt-30°)=30°-(-30°)=60°
即,電壓超前于電流60°,或電流滯后于電壓60°。
相位變化對于真實信號的影響是什么
作者:一凡
鏈接:https://www.zhihu.com/question/26450103/answer/32882188
來源:知乎
著作權歸作者所有。商業轉載請聯系作者獲得授權,非商業轉載請注明出處。
一個信號經過傅里葉分解后變成Phase+Magnitude兩部分
形象的說,Phase代表信號的形狀,Magnitude代表對應形狀的大小比例
一維信號的確不太直觀,我們來看二維的信號(圖像)吧,上圖: (圖:又上我?!)

圖中 F‘(Magnitude,Phase) 代表傅里葉逆變換
二維圖像處理中,原圖經傅里葉分解成兩部分:Magnitude & Phase(相位)。 圖a是原圖(Spatial Domain),圖b是相位圖,很亂是吧,但是用相位圖(不加Magnitude)還原出Spatial Domain的信號(圖像),即圖c,依然可以看到原圖的輪廓,這代表相位是圖形的形狀分量,而Magnitude(中文是啥?)代表形狀分量(Phase)每一部分的比重

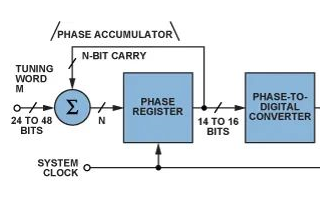
數字鎖相環(DPLL)固有的相位抖動主要來源于多個方面,這些抖動因素共同影響著鎖相環的同步精度和穩定性。以下是數字鎖相環相位抖動產生的主要原因:

發射端涉及到抖動的來源有:Thermal Noise(隨機抖動), Duty Cycle Distortion(占空比失真), Power Supply...
相位,指的是某個波形,在特定時間的位置,比如正弦波,當相位達到最高點的時候,我們稱之為波峰。假設有一個正弦波電壓通過某個電阻,我們把電流記錄下來與電壓對...
三相系統中的不平衡分量,且相互之間相位相同。求零序分量:把三個向量相加求和。即A相不動,B相的原點平移到A相的頂端(箭頭處),注意B相只是平移,不能轉動。
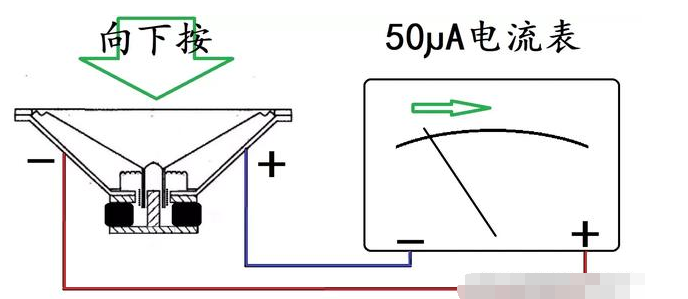
第一種是用指針式萬用表來測。首先把萬用表拔到直流50μA檔,然后用表筆觸到揚聲器的兩個引腳,同時用手按動喇叭的紙盆。向下按時表針如正向擺動,此時正表筆所...
2021-06-15 標簽:相位 2.3萬 0
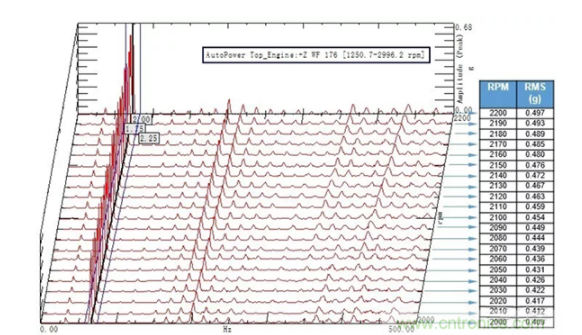
當需要比較各階次的相對大小、對總量級OA的貢獻,以及評價階次的線性度時都需要對階次進行提取。而常規提取出來的階次是不帶相位信息的,在這里我們講一講帶相位...
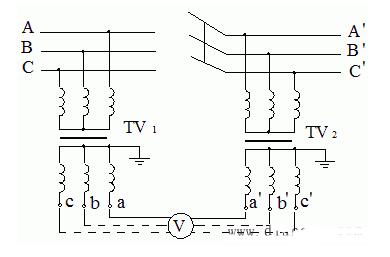
測量相位,是在有電磁連接的同一系統并列或環接、主變壓器并列、以及新線路投入時不可缺少的試驗項目之一。測量相位的目的在于判斷相位和相序,防止由于彼此不一致...
已更新表 5-2,在確認沒有時鐘遺漏中添加了檢查時序報告的信息,已更新降低網絡延遲, 已更新表 5-4,已更新報告設計分析擁塞報告,在報告設計分析復雜性...
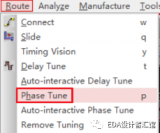
從早期的15.x版本到如今依然運用廣泛的16.5版本,不管是差分對內還是組間,繞等長的命令只有一個Delay Tune可以用,不過就這一個命令從速度上來...
AD9164 16位12GSPS RF DAC支持直至S頻段的直接RF。這款高性能DAC配合表貼塑料封裝的HMC1114 10W SiC襯底GaN功率放...
有關電流互感器電流相位問題的產生原因,同一個表在直接時接入的是線電流,用互感器時接入的是與原電流有相位差的電流的問題。
本文將簡要介紹該技術,說明其優勢和不足,考察一些應用示例,同時介紹一些有助于該技術推廣的新產品。
相位偏移調制,又稱移相鍵控(PSK,Phase Shift Keying)是一種利用相位差異的信號來傳送資料的調制方式。該傳送信號必須為正交信號,其基底...
相位傳感器是感應氣門位置的信息然后提供給ECU的傳感器。相位傳感器起檢測相位作用,如果相位不準確會報警,在儀表上發動機故障燈亮。
音響系統中的相位是很抽象的,涉及到很多相關的問題,在這里我們主要討論一下工程常遇到的一些較容易發生的相位問題。 在物理學中,相位的概念是反映交流信號任何...
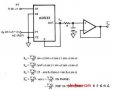
利用相敏光探測器電路可以測量正弦信號。該電路也可以達到180°輸出相位與適當的極性,這取決于參數和少于1%的誤差。
 換一批
換一批
編輯推薦廠商產品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯網 | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發電 | UPS | AR | 智能電網 | 國民技術 | Microchip |
| 開關電源 | 步進電機 | 無線充電 | LabVIEW | EMC | PLC | OLED | 單片機 |
| 5G | m2m | DSP | MCU | ASIC | CPU | ROM | DRAM |
| NB-IoT | LoRa | Zigbee | NFC | 藍牙 | RFID | Wi-Fi | SIGFOX |
| Type-C | USB | 以太網 | 仿真器 | RISC | RAM | 寄存器 | GPU |
| 語音識別 | 萬用表 | CPLD | 耦合 | 電路仿真 | 電容濾波 | 保護電路 | 看門狗 |
| CAN | CSI | DSI | DVI | Ethernet | HDMI | I2C | RS-485 |
| SDI | nas | DMA | HomeKit | 閾值電壓 | UART | 機器學習 | TensorFlow |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1


