 電子發(fā)燒友App
電子發(fā)燒友App


基于TMS320F2812的視頻圖像采集系統(tǒng)的設(shè)計(jì)
快速發(fā)展的汽車(chē)產(chǎn)業(yè)為車(chē)載電子產(chǎn)品提供了廣闊的應(yīng)用市場(chǎng),如車(chē)載的“紅外監(jiān)視”、“倒車(chē)?yán)走_(dá)”等視頻監(jiān)視設(shè)備,為駕駛員既帶來(lái)了方便,也帶來(lái)了安全。這些監(jiān)視設(shè)備離不開(kāi)視頻圖像采集,而視頻圖像采集的關(guān)鍵環(huán)節(jié)就是視頻信號(hào)的AD轉(zhuǎn)換。傳統(tǒng)的視頻圖像采集系統(tǒng)一般采用專(zhuān)門(mén)的圖像采集芯片,如SAA7110視頻解碼芯片,自動(dòng)完成圖像的采集;缺點(diǎn)是電路復(fù)雜、成本高,不方便對(duì)其進(jìn)行軟件編程和升級(jí),進(jìn)而其采集圖像的精度和速度也受到制約,對(duì)非標(biāo)準(zhǔn)視頻信號(hào)適應(yīng)性不好。
本設(shè)計(jì)采用DSP的片上ADC實(shí)現(xiàn)圖像采集,不需要專(zhuān)業(yè)的視頻解碼芯片,雖然不能完成圖像的自動(dòng)采集,但是具有電路簡(jiǎn)單、成本低、易于維護(hù)和升級(jí)的特點(diǎn)。更重要的是可以對(duì)其進(jìn)行軟件編程,以適應(yīng)不同標(biāo)準(zhǔn)視頻信號(hào)的采集。用DSP和CPLD搭建數(shù)據(jù)采集系統(tǒng)時(shí),不必外接專(zhuān)業(yè)的圖像采集芯片,避免了復(fù)雜的硬件設(shè)計(jì),同時(shí)提供了足夠的處理能力。本設(shè)計(jì)采用TI公司的TMS320F2812芯片采集圖像,并搭建TMS320C6416t處理圖像,實(shí)現(xiàn)了基于DSP的視頻圖像采集。
視頻圖像采集的系統(tǒng)方案
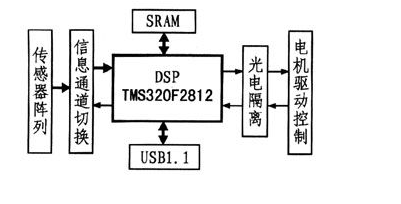
視頻圖像采集包括視頻預(yù)處理電路和A/D轉(zhuǎn)換電路,其結(jié)構(gòu)框圖如圖1所示。
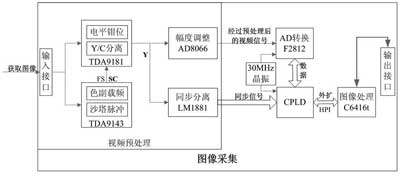
圖1 視頻采集結(jié)構(gòu)框圖
首先對(duì)獲取的圖像信號(hào)進(jìn)行同步信號(hào)分離,將分離出來(lái)的同步信號(hào)連接至CPLD。視頻信號(hào)在經(jīng)過(guò)電平鉗位、幅度調(diào)整等預(yù)處理后,將其連接到F2812的ADC輸入端。
F2812通過(guò)XINTF將其片上ADC的結(jié)果輸出至CPLD,CPLD根據(jù)分離出的同步信號(hào)的時(shí)序關(guān)系將視頻亮度信號(hào)通過(guò)HPI傳輸給圖像處理器C6416t進(jìn)行圖像處理。其中,本文主要設(shè)計(jì)的是前端圖像采集部分,用戶(hù)可以根據(jù)自己的需要更換圖像處理器,以滿(mǎn)足不同的圖像處理要求。
1 視頻預(yù)處理
模擬視頻信號(hào)中包含有視頻亮度信號(hào)、視頻色度信號(hào)、視頻同步信號(hào)。視頻信號(hào)的峰峰值為1V,并且其同步信號(hào)電平低于零電平。而F2812采用的ADC量程為0~3V,因此在視頻轉(zhuǎn)換之前,需要對(duì)其進(jìn)行Y/C分離、同步分離、電平鉗位、幅度放大等預(yù)處理。
①Y/C分離和電平鉗位
本系統(tǒng)采用飛利浦公司的TDA9181和TDA9143芯片進(jìn)行Y/C分離。TDA9181是多標(biāo)準(zhǔn)動(dòng)態(tài)梳狀濾波器,由延時(shí)、加法器、減法器、帶通濾波器組成,支持PAL B、G、H、D、I、M、N 及NTSC M標(biāo)準(zhǔn)的梳整,可以為其相關(guān)制式的視頻信號(hào)進(jìn)行Y/C分離。TDA9181還能對(duì)輸入的信號(hào)進(jìn)行電平鉗位。
TDA9143是一種由I2C總線控制的PAL/NTSC/SECAM解碼器,可以為T(mén)DA9181提供Y/C分離所需要的沙堡脈沖信號(hào)和色副載頻信號(hào)。

圖2 Y/C分離原理圖

圖3 AD8066視頻緩沖器原理圖

圖4 同步分離

圖5 LM1881分離原理圖
TDA9181和TDA9143接口原理圖如圖2所示。
②視頻緩沖器
由于視頻信號(hào)的峰峰值為1V,而F2812的ADC量程為0~3V,所以為了更好的進(jìn)行視頻采樣,需要對(duì)視頻信號(hào)放大3倍。
系統(tǒng)采用的AD8066是高壓、高速、低功耗和大電流的軌對(duì)軌輸出的單路和雙路運(yùn)算放大器,其微分增益誤差和微分相位誤差分別為0.01% 和0.02%,7MHz帶寬的增益均勻性為0.1dB,非常適合視頻緩沖應(yīng)用。
AD8066用作視頻緩沖器的原理圖如圖3所示。
③同步分離
同步分離采用NS公司的LM1881芯片。LM1881能夠從峰峰值為0.5~2V的PAL、NTSC和SECAM視頻信號(hào)分離出各種同步信號(hào),如圖4所示 (a:復(fù)合視頻信號(hào),b:復(fù)合同步信號(hào),c:場(chǎng)同步信號(hào),d:奇偶場(chǎng)信號(hào),e:突發(fā)/后肩信號(hào))。此外,LM1881還可應(yīng)用于非標(biāo)準(zhǔn)視頻信號(hào)的同步分離,原理如圖5所示。
2 視頻A/D轉(zhuǎn)換器
TMS320F2812為32位定點(diǎn)可編程處理器芯片,最高頻率為150MHz,可以方便地與其他處理器連接,片上12位ADC最高采樣帶寬可達(dá)12.5MHz,擁有相當(dāng)于16級(jí)的FIFO,使片上ADC能達(dá)到上限工作速率,實(shí)現(xiàn)每80ns采集1個(gè)數(shù)據(jù)。此外,TMS320F2812可以方便的進(jìn)行軟件編程,以適應(yīng)不同標(biāo)準(zhǔn)的視頻信號(hào),故采用F2812用作AD轉(zhuǎn)換。
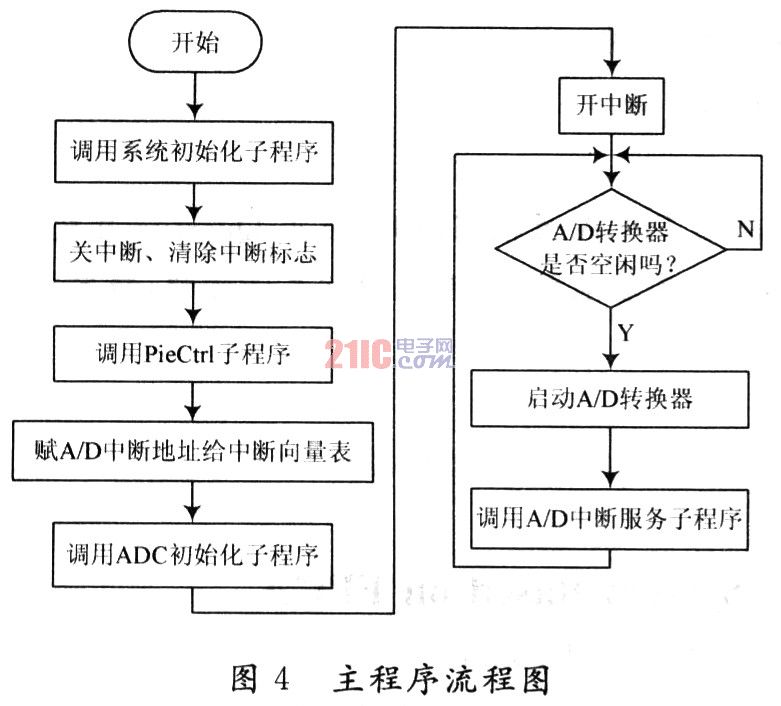
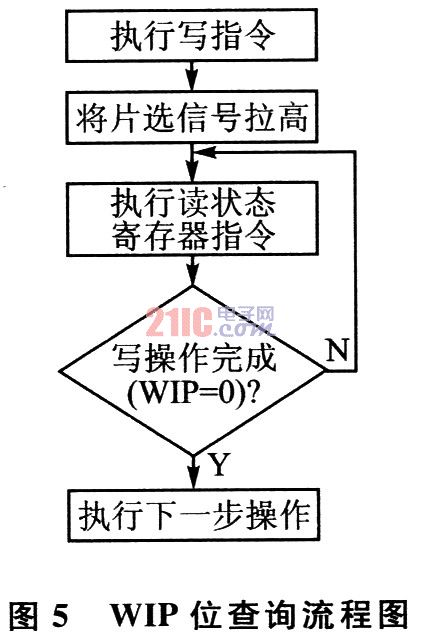
采用級(jí)聯(lián)、連續(xù)自動(dòng)排序模式工作流程圖如圖6所示。

圖6 AD轉(zhuǎn)換工作流程圖
3 視頻圖像處理
本系統(tǒng)設(shè)計(jì)了用CPLD外擴(kuò)TMS320C6416t處理圖像,用戶(hù)可以根據(jù)自己的需要更換圖像處理器,以達(dá)到需要的處理效果。
圖像采集
1 采集流程
① 將攝像機(jī)輸出的PAL/NTSC制式的模擬視頻信號(hào)通過(guò)TDA9181和TDA9143進(jìn)行Y/C分離和電平鉗位后,一路給TMS320F2812變成數(shù)字信號(hào),另一路給LM1881分離出同步信號(hào)。
② 將F2812采集后的圖像數(shù)據(jù)通過(guò)其XINTF傳輸至CPLD;將LM1881分離出奇偶場(chǎng)信號(hào)和復(fù)合同步信號(hào)也交給CPLD進(jìn)行邏輯控制。
③ 由CPLD根據(jù)奇偶場(chǎng)信號(hào)和復(fù)合同步信號(hào)來(lái)決定是采集奇場(chǎng)圖像還是偶場(chǎng)圖像,或者采集一幀完整的圖像。(用戶(hù)也可以用自己外擴(kuò)的圖像處理器來(lái)判斷圖像的幀數(shù)。)
2 行、場(chǎng)處理
①當(dāng)場(chǎng)同步信號(hào)到來(lái)時(shí),CPLD根據(jù)奇偶場(chǎng)信號(hào)決定是采集奇場(chǎng)圖像還是偶場(chǎng)圖像,或者采集一幀完整的圖像;當(dāng)復(fù)合同步信號(hào)到來(lái)時(shí),CPLD判斷是哪一行。CPLD會(huì)根據(jù)這些邏輯時(shí)序來(lái)控制F2812的采集,以及提供同步時(shí)序給外擴(kuò)的圖像處理器。
②用戶(hù)也可以根據(jù)自己的需要處理這些同步信號(hào),比如用外擴(kuò)的圖像處理器代替CPLD來(lái)判斷圖像的行、場(chǎng)。
系統(tǒng)性能
只有AD采集的速度和精度達(dá)到視頻圖像變化的要求,才能對(duì)視頻圖像進(jìn)行實(shí)時(shí)的采集。標(biāo)準(zhǔn)PAL制式模擬視頻信號(hào)的每場(chǎng)掃描行數(shù)為625行,每幀實(shí)際傳送圖像為575行,場(chǎng)頻50Hz,幀頻為每秒25幀,每秒鐘信號(hào)的變化頻率是5.52MHz,即圖像信號(hào)帶寬為5.52MHz,根據(jù)抽樣定理AD采樣的帶寬至少是11MHz;而TMS320F2812片內(nèi)的AD轉(zhuǎn)換器最高采樣帶寬可達(dá)12.5MHz,因此在速度方面完全滿(mǎn)足采集視頻信號(hào)的要求。同樣的,F(xiàn)2812的視頻AD轉(zhuǎn)換精度為12比特,用戶(hù)也可以對(duì)F2812的ADC模塊進(jìn)行編寫(xiě)校正算法,來(lái)不斷的提高ADC的轉(zhuǎn)換精度。
應(yīng)用
本系統(tǒng)平臺(tái)可用于多種制式的視頻圖像采集和數(shù)據(jù)參數(shù)采集,可以制作成視頻采集卡和數(shù)據(jù)采集卡。視頻采集卡可用于車(chē)載的視頻監(jiān)視,如目標(biāo)識(shí)別和倒車(chē)?yán)走_(dá)。
在視頻采集卡的輸入端接紅外圖像傳感器,輸出接口接顯示設(shè)備,就可以用于夜間紅外監(jiān)視。用戶(hù)可以方便的對(duì)圖像處理器(如C6416t)進(jìn)行軟件編程,用于目標(biāo)獲取和識(shí)別。例如,汽車(chē)在夜間行駛時(shí),當(dāng)前面有不明障礙物,紅外監(jiān)視器就會(huì)提前發(fā)出警報(bào)并在監(jiān)視器上顯示目標(biāo)來(lái)提醒駕駛員。
在視頻采集卡的輸入端接普通的光電攝像頭,可以用于倒車(chē)視頻監(jiān)視。這樣駕駛員就不必轉(zhuǎn)身扭頭倒車(chē)了,只需要看著旁邊的視頻監(jiān)視器就可以方便的倒車(chē)。
本系統(tǒng)平臺(tái)也可以用于多種數(shù)據(jù)參數(shù)的采集,在視頻采集卡的輸入端接不同的數(shù)據(jù)傳感器,就可以用于工業(yè)自動(dòng)化和汽車(chē)的數(shù)據(jù)參數(shù)監(jiān)視。例如,汽車(chē)的輪胎氣壓是否正常、車(chē)內(nèi)的空氣質(zhì)量是否達(dá)標(biāo)、行駛的速度是否過(guò)快、水溫是否過(guò)高,以及剩余的油量是否過(guò)少等,都可以通過(guò)對(duì)數(shù)據(jù)參數(shù)的采集后,來(lái)提醒駕駛員。
結(jié)束語(yǔ)
本系統(tǒng)不需要專(zhuān)門(mén)的ADC芯片,單片DSP就能實(shí)現(xiàn)視頻圖像、數(shù)據(jù)采集;并且可以方便對(duì)F2812進(jìn)行軟件編程來(lái)不斷提高圖像、數(shù)據(jù)的采集質(zhì)量;另外CPLD提供了豐富的外擴(kuò)接口,用戶(hù)可以很容易的更換自己的圖像處理器,為以后的圖像數(shù)據(jù)處理提供了方便。









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論