 電子發燒友App
電子發燒友App


摘要:為了獲得成功的硬件設計,在選擇串行器/解串器(SerDes)元件之前最好針對具體的應用進行評估。本應用筆記提供的設計指南有助于快速配置MAX9257/MAX9258評估板的I2C模式,逐步顯示圖形用戶界面(GUI)的變化。按照這些說明,能夠迅速完成I2C模式的配置。
以下內容深入介紹MAX9257/MAX9258評估板的所有功能和特性測試。作為一個特殊例子,選擇了I2C模式。在配置這一模式之前,按照常規方式對評估板加電,啟動軟件。本應用筆記假定用戶已經掌握并熟悉MAX9257/MAX9258評估板的使用。注意,MAX9257/MAX9258評估板資料需要申請才能獲得。
如果照相機有I2C接口,MAX9258和MAX9257都應該配置為I2C接口工作模式。由于板上仿真照相機工作在默認的UART接口,照相機應首先從UART接口切換到I2C接口。按照以下步驟來使用評估板的I2C接口。
圖5. 采用數字示波器(DSO)監視RxIN和TxIN,顯示MAX9258收到鏈路上傳輸的數據。
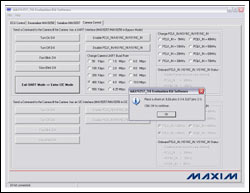
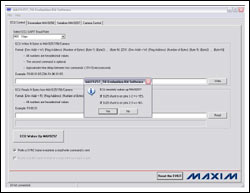
設置好跳線后,照相機控制標簽必須關閉UART模式,進入I2C模式:點擊Exit UART Mode -> Enter I2C Mode。為了正常工作在I2C模式,JU26和JU27的引腳2-3必需短接 — 按照軟件彈出窗口的說明進行操作(圖6)。
詳細圖片(PDF)
圖6. I2C正常工作時的屏幕說明,工作在I2C模式時,確定JU26和JU27的引腳2-3安裝了短路器。
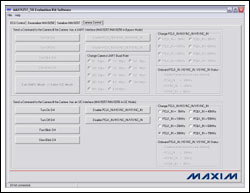
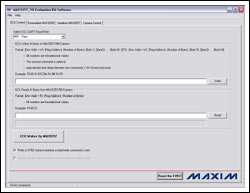
現在,系統已經使能Camera Control頁面的下半部分。如圖7所示,頁面上半部分顯示為灰色,表明工作在I2C模式下,沒有使能UART模式。
詳細圖片(PDF)
圖7. Camera Control頁面的上半部分顯示為灰色,表明使能了I2C模式。
如果點擊左側按鈕,D4通/斷并快/慢閃爍,用來仿真照相機控制,由此可以看出對照相機側I2C工作模式的控制。D4位于FPGA的右上部,靠近解串器板的微控制器。
為了使鏈路正常工作,必須設置SerDes和像素時鐘鏈路。為了測試,假設SerDes像素時鐘速率為10MHz,位分辨率為12位(圖8和圖9)。
詳細圖片(PDF)
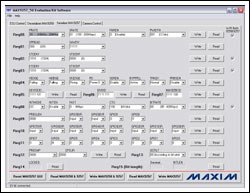
圖8. 設置所有參數后的Serializer MAX9257頁面
詳細圖片(PDF)
圖9. 正確設置后的Camera Control屏幕
注意,SerDes屏幕顯示類似,考慮到本應用筆記的目的,只給出了照相模式下的串行器設置屏幕。按照相同的SerDes屏幕設置,可以使系統正常工作在照相模式下。
這將得到表2所示設置結果。
表2. SerDes設置結果
使能Camera Control頁面的PCLK之前,確定寫入了這些參數。
單擊Camera Control頁面的Enable PCLK_IN/HSYNC_IN/VSYNC_IN按鈕,如圖10屏幕所示。該屏幕顯示了Camera Control頁面上使能或禁止PCLK時的典型傳輸序列。只是用于驗證,顯示數據在I2C模式下傳輸時的信號狀態。
圖10. 這一傳輸序列說明了使能PCLK之后,I2C模式下的數據狀況。
正確設置解串器后,結果應該如圖11屏幕所示,顯示了詳細的PRATE、SRATE和PWIDTH。如果觸發TxIN引腳,將這一信息寫入解串器,將得到圖12所示的示波器顯示結果,它只顯示了發送信息,沒有接收信息。
詳細圖片(PDF)
圖11. 正確設置了MAX9258解串器
圖12. 示波器顯示的MAX9258解串器正確設置后的傳輸結果
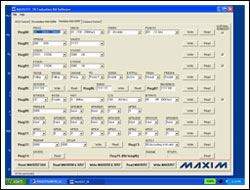
同樣,正確設置串行器應得到圖13所示的屏幕,顯示了詳細的PRATE、SRATE和PWIDTH。注意,為保證正常通信,應該使能串行器的SEREN位。由于I2C模式提供了非常靈活的接口通信,即使在設置后期也可以使能SEREN位。
詳細圖片(PDF)
圖13. 上圖表明正確設置了MAX9257串行器。Deserializer MAX9258屏幕應該和該屏幕顯示相似,這樣,系統才能在照相或I2C模式下正常工作。
以下內容深入介紹MAX9257/MAX9258評估板的所有功能和特性測試。作為一個特殊例子,選擇了I2C模式。在配置這一模式之前,按照常規方式對評估板加電,啟動軟件。本應用筆記假定用戶已經掌握并熟悉MAX9257/MAX9258評估板的使用。注意,MAX9257/MAX9258評估板資料需要申請才能獲得。
- 確定所有跳線都處于默認位置,如表1所示。
表1. MAX9257/MAX9258評估板跳線設置JU1 Shunted Active-low PD pin is pulled up to VCC by a 1kΩ resistor JU2 Open LVDS line-probing connector JU3 Open LVDS line-probing connector JU4 Shunted Active-low ERROR pin is pulled up to VCCOUT by a 1kΩ resistor JU5 Shunted LOCK pin is pulled up to VCCOUT by a 1kΩ resistor JU6 Shunted MAX9258 VCC is connected to an on-board LDO +3.3V output JU7 Shunted MAX9258 VCCOUT is connected to an on-board LDO +3.3V output JU8 Shunted MAX9258 VCCPLL is connected to an on-board LDO +3.3V output JU9 Shunted MAX9258 VCCSPLL is connected to an on-board LDO +3.3V output JU10 Shunted MAX9258 VCCLVDS is connected to an on-board LDO +3.3V output JU11 Shunt across pins 2-3 MAX9258 is powered by an on-board LDO (U4), whose input is +5V JU14 Shunt across pins 2-3 LVDS cable line 1 is connected to ground JU15 Shunted MAX9258 RX pin is connected to the on-board emulating ECU Rx line JU16 Shunted MAX9258 TX pin is connected to the on-board emulating ECU Tx line JU17 Shunt across pins 2-3 MAX9257 SCL/TX pin is pulled up to VCCIO JU18 Shunt across pins 2-3 MAX9257 SDA/RX pin is pulled up to VCCIO JU19 Shunted MAX9257 VCC is connected to an on-board LDO +3.3V output JU20 Shunted MAX9257 VCCIO is connected to an on-board LDO +3.3V output JU21 Shunted MAX9257 VCCFPLL is connected to an on-board LDO +3.3V output JU22 Shunted MAX9257 VCCSPLL is connected to an on-board LDO +3.3V output JU23 Shunted MAX9257 VCCLVDS is connected to an on-board LDO +3.3V output JU24 Shunt across pins 2-3 J6 connector has one side connected to ground JU25 Shunt across pins 2-3 MAX9257 REM pin is connected to ground JU26 Shunt across pins 1-2 MAX9257 SCL/TX pin is connected to the on-board emulating camera Rx line JU27 Shunt across pins 1-2 MAX9257 SDA/RX pin is connected to the on-board emulating camera Tx line JU29 Shunt across pins 2-3 LVDS cable line 1 is connected to ground JU30 Open LVDS line-probing connector JU31 Open LVDS line-probing connector
- 在評估板兩層的5V和GND焊盤之間連接5V電源(圖1)。在完成所有連接并確定所有跳線位置正確之前,請不要打開電源。
圖1. 實驗測試的設置配置
- 在J2和J7之間連接JAE電纜。
- 將示波器的CH1連接至J1-37。
- 將示波器的CH2連接至J1-35。
- 將示波器的CH3連接至J5-12。
- 在PC和J3之間連接USB電纜(注意:不是J8)。
- 在Start菜單中,打開其圖標,啟動MAX9257_58評估軟件。
- 彈出“if ECU remotely wakes up the MAX9257”菜單時,點擊Yes按鈕。出現圖2所示軟件主窗口。
詳細圖片(PDF)
圖2. 點擊Yes按鈕時出現的軟件主窗口,表示由ECU遠程喚醒MAX9257。一旦ECU喚醒了MAX9257,TxIN、RxOUT和CCEN均為高電平。
- 確定在軟件主窗口的狀態條顯示"EV kit connected"消息,表明評估板連接正確。
- 在ECU Control頁面上點擊ECU Wakes Up MAX9257按鈕(圖3)。
詳細圖片(PDF)
圖3. 點擊ECU Wakes Up MAX9257按鈕
- 點擊Deserializer MAX9258標簽,跳至Deserializer MAX9258頁面(圖4)。

詳細圖片(PDF)
圖4. 跳至Deserializer MAX9258頁面
- 點擊Read MAX9258 & 9257按鈕,讀取MAX9258和MAX9257寄存器。
- 選擇ETOCNT下拉菜單,點擊Reg03右側的Write按鈕,將MAX9258寄存器03 ETOCNT和MAX9257寄存器03 ETOCNT設置為0100。
- 通過選擇CTO下拉菜單,點擊Reg07右側的Write按鈕,將MAX9258寄存器07 CTO和MAX9257寄存器08 CTO設置為111。
- 點擊Serializer MAX9257標簽,跳至Serializer MAX9257頁面。
- 選擇SEREN下拉菜單,點擊Reg04右側的Write按鈕,使能MAX9257 SEREN位。注意,鏈路上有數據通信時,SEREN窗口應一直處于激活狀態。
- 點擊Camera Control標簽,跳至Camera Control頁面。
- 點擊Slow Blink D4按鈕;確定LED D4閃爍大約5秒鐘。
- 點擊Enable PCLK_IN/HSYNC_IN/VSYNC_IN按鈕;確定LOCK指示LED D1打開。如果打開,表明系統被鎖定。
- 使用多蹤示波器檢查電路板波形。設置相應的觸發器,可以觀察到鏈路的發送/接收過程以及傳輸的數據。
如果照相機有I2C接口,MAX9258和MAX9257都應該配置為I2C接口工作模式。由于板上仿真照相機工作在默認的UART接口,照相機應首先從UART接口切換到I2C接口。按照以下步驟來使用評估板的I2C接口。
- 啟動程序或點擊ECU Control頁面的Reset the EVKIT按鈕。
- 如果MAX9257 REM置為高電平(JU25 1-2引腳安裝了短路器),點擊ECU Control頁面的ECU Wakes Up MAX9257按鈕。如果MAX9257 REM置為低電平(JU25 2-3引腳安裝了短路器),跳過這一步。
- 跳至Deserializer MAX9258頁面。點擊Read MAX9258 & 9257按鈕,刷新GUI當前寄存器值,將顯示最近的寄存器值(或啟動時的默認值)。
- 選中W/R Both 9258&9257標簽下面的4個復選框,可以同時設置SerDes寄存器,使用戶能夠避免SerDes參數設置出現矛盾。
- 將MAX9258和MAX9257的tCTO設置為64位(CTO = 100)。
- 跳至Camera Control頁面;點擊Exit UART Mode -> Enter I2C Mode按鈕。
- 按照信息提示操作 — 將短路器從JU26/JU27的引腳1-2改到引腳2-3,點擊OK按鈕。
- 現在,照相機和SerDes已經采用了I2C接口工作。可以通過測試D4二極管的通/斷和快/慢閃爍來驗證照相機是否正常工作。這一功能的控制按鈕位于窗體左側。可以跳至任一頁面,使用SerDes的這一功能(即,重新寫入各個可訪問寄存器)。
- 仿真照相機I2C接口時,工作速率高達4.25MHz,MAX9258和MAX9257也是如此。在改變ECU I2C主機時鐘之前,應正確配置MAX9258和MAX9257的BITRATE寄存器位。
- 如果數據在鏈路上傳輸,應確定SEREN置為Enabled。
驗證MAX9257/MAX9258評估板性能所需的測試儀表和部件
- Hewlett-Packard E3620A:雙路0至25V,0到1A電源。
- Tektronix TDS 3014:4通道DSO,100MHz BW,1.25Gsps采樣速率以及標準10x探針。
- 基于Windows? XP的PC或筆記本電腦,支持USB接口。
- 2m JAE電纜(實現MAX9257串行器和MAX9258解串器之間的有效連接)
MAX9257/MAX9258評估板的I2C通信模式
這一測試程序闡述評估板在I2C模式時進行通信的步驟。要使該模式正常工作或設置正確,系統必須首先以UART接口模式啟動。設置MAX9257/MAX9258時要求軟件設置INTMODE = I2C (確定選中屏幕右側的選項框,以更新/寫入MAX9257和MAX9258)。寫器件,觸發一次TxIN引腳,采集寫入器件的命令序列(即,建立I2C模式設置)。圖5所示電路板配置為在有限CTO模式下發送(TxIN, CH2)和接收(RxIN, CH3)數據,配置電路板為I2C模式時要求使用這種模式。注意,所有步驟都是在UART模式下進行的(JU26和JU27的引腳1-2安裝短路器)。圖5. 采用數字示波器(DSO)監視RxIN和TxIN,顯示MAX9258收到鏈路上傳輸的數據。
設置好跳線后,照相機控制標簽必須關閉UART模式,進入I2C模式:點擊Exit UART Mode -> Enter I2C Mode。為了正常工作在I2C模式,JU26和JU27的引腳2-3必需短接 — 按照軟件彈出窗口的說明進行操作(圖6)。
詳細圖片(PDF)
圖6. I2C正常工作時的屏幕說明,工作在I2C模式時,確定JU26和JU27的引腳2-3安裝了短路器。
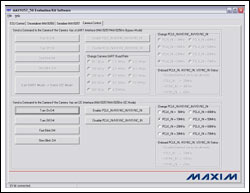
現在,系統已經使能Camera Control頁面的下半部分。如圖7所示,頁面上半部分顯示為灰色,表明工作在I2C模式下,沒有使能UART模式。
詳細圖片(PDF)
圖7. Camera Control頁面的上半部分顯示為灰色,表明使能了I2C模式。
如果點擊左側按鈕,D4通/斷并快/慢閃爍,用來仿真照相機控制,由此可以看出對照相機側I2C工作模式的控制。D4位于FPGA的右上部,靠近解串器板的微控制器。
為了使鏈路正常工作,必須設置SerDes和像素時鐘鏈路。為了測試,假設SerDes像素時鐘速率為10MHz,位分辨率為12位(圖8和圖9)。
詳細圖片(PDF)
圖8. 設置所有參數后的Serializer MAX9257頁面
詳細圖片(PDF)
圖9. 正確設置后的Camera Control屏幕
注意,SerDes屏幕顯示類似,考慮到本應用筆記的目的,只給出了照相模式下的串行器設置屏幕。按照相同的SerDes屏幕設置,可以使系統正常工作在照相模式下。
這將得到表2所示設置結果。
表2. SerDes設置結果
| Page Designator | Signal | Setting |
| Camera Control | PCLK_IN | 10MHz |
| SerDes Control | PRATE | 00 (5MHz to 10MHz) |
| SRATE | 01 (100Mbps to 200Mbps) | |
| PWIDTH | 001 (12 bits) |
使能Camera Control頁面的PCLK之前,確定寫入了這些參數。
單擊Camera Control頁面的Enable PCLK_IN/HSYNC_IN/VSYNC_IN按鈕,如圖10屏幕所示。該屏幕顯示了Camera Control頁面上使能或禁止PCLK時的典型傳輸序列。只是用于驗證,顯示數據在I2C模式下傳輸時的信號狀態。
圖10. 這一傳輸序列說明了使能PCLK之后,I2C模式下的數據狀況。
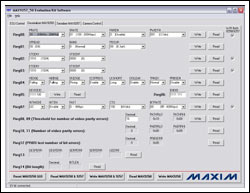
正確設置解串器后,結果應該如圖11屏幕所示,顯示了詳細的PRATE、SRATE和PWIDTH。如果觸發TxIN引腳,將這一信息寫入解串器,將得到圖12所示的示波器顯示結果,它只顯示了發送信息,沒有接收信息。
詳細圖片(PDF)
圖11. 正確設置了MAX9258解串器
圖12. 示波器顯示的MAX9258解串器正確設置后的傳輸結果
同樣,正確設置串行器應得到圖13所示的屏幕,顯示了詳細的PRATE、SRATE和PWIDTH。注意,為保證正常通信,應該使能串行器的SEREN位。由于I2C模式提供了非常靈活的接口通信,即使在設置后期也可以使能SEREN位。
詳細圖片(PDF)
圖13. 上圖表明正確設置了MAX9257串行器。Deserializer MAX9258屏幕應該和該屏幕顯示相似,這樣,系統才能在照相或I2C模式下正常工作。













 工商網監
工商網監
評論