 電子發燒友App
電子發燒友App


1? 概述
在工業控制系統中,現場總線技術的發展使智能現場設備和自動化系統以全數字式、雙向傳輸、多分支結果的通信控制網絡相連,使工業控制系統向分散化、網絡化和智能化發展。但是由于各類現場總線標準之間的不可兼容性無法實現統一,阻礙了現場總線技術的發展。另一方面,以太網技術作為壟斷辦公自動化領域的通信技術,以其通用性、低成本、高效率、高可靠性和高穩定性等諸多優勢,得到了工控界越來越多的關注和認可。用以太網技術來實現從管理層到工業現場層的一致性通信,人們習慣上將應用到工業領域的以太網技術稱為“工業以太網”。
工業數據通信網絡與信息網絡不同,工業數據通信不僅要解決信號的互通和設備的互連,而且需要解決信息的互通問題,即信息的互相識別、互相理解和互可操作。所謂信號的互通,即兩個需要互相通信的設備所采用的通信介質、信號類型、信號大小、信號的輸入/輸出匹配等參數,以及數據鏈路層協議符合同一標準,不同的設備能連接在同一網絡上實現互連。如果僅僅實現設備互連,但沒有統一的高層協議(如應用層協議),那么不同設備之間還是不能相互理解、識別彼此所傳送的信息含義,就不能實現信息互通,也就不可能實現開放系統之間的互可操作。互可操作性是指連接到同一網絡上、不同廠家的設備之間,通過統一應用層協議進行通信與互用,性能類似的設備可以實現互換。這是工業數據通信網絡區別于一般IT網絡的重要特點。
對工業控制來說,還有一個很重要的區別就是實時性。實時性的一個重要標志就是時間的確定性,通信時數據傳輸時間不是隨機的,而是可事先確定的。一個事件發生后,系統在一個可準確預見的時間范圍內做出反應。反應速度由被控制過程來決定。對于高傳動性的系統,實時性的要求就要更高了。
雖然以太網具有比現場總線高許多的傳輸速率,但是卻不能保證實現控制設備間的實時通信。這主要是因為標準的以太網協議是以CSMA/CD(Carrier Sense Multiple Access/Collision Detection,載波*多路訪問/沖突檢測)技術為基礎的,網絡上的各工作站對總線進行“*”以確認總線是否空閑。如果空閑,它們就開始發送數據。如果兩個工作站同時試圖發送數據,沖突就產生了。在這種情況下,訪問機制首先確保工作站停止傳輸數據,而后根據預定義的隨機選擇算法,工作站再次嘗試發送數據。這個過程一直重復直至沖突消失。上述機制保證了數據的安全發送,可是從確定性行為的角度來看,這卻是一個很大的障礙。它允許數據傳輸時間可被任意推遲,也就不能實現數據的實時通信。要想使以太網技術在不改變其現有標準的前提下更好地應用到工控領域,就要找到一種解決方案來解決這個問題。
為此,各大公司開始研究基于以太網的通信的實時性問題,并各自提出了不同的解決方案。有些成果已得到了工業現場標準委員會的認可,并寫入新的標準中。
下面就介紹幾種解決方案,看他們是如何保證通信實時性的。
2? 幾種解決方案分析
2.1? Ethernet Powerlink
這個方案是由奧地利貝加萊公司提出的Ethernet Powerlink所采用的解決方法。Ethernet Powerlink 是以快速以太網為基礎開發出來的實時工業以太網協議。貝加萊公司的目標是在快速以太網的基礎上,創建一個高速的、實時的、確定性的網絡環境。利用高速循環數據交換,使抖動降到很小(小于1 μs),同時在不影響循環通信的情況下處理非循環的數據。而且,I/O與驅動數據能夠在相互之間以及與PCC系統間完成同步傳輸。因為是完全建立在標準快速以太網之上,所以Ethernet Powerlink完全符合標準的拓撲結構和物理特性,且能夠與IT技術無縫連接,傳輸速率為100 Mbps,最小循環周期為200 μs。使用帶RJ45插頭的標準雙絞線電纜(超五類電纜)。網絡拓撲支持星型、樹型和菊花鏈型結構,單個網段最多可以連接240個實時站點。由于有實時性的要求,因此不允許使用交換機,只能使用集線器作為連接設備。
2.1.1? Ethernet Powerlink的報文幀格式
?
?
?
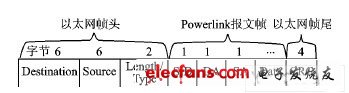
圖1? Powerlink報文幀格式
報文幀格式采用了標準快速以太網的幀頭、幀尾,如圖1所示。在以太網幀頭后面的是實際的Powerlink報文,包括服務標識(SID)、目標地址(DA)、源地址(SA)和數據(Data)。其中Length/Type字段的值>1? 500,這是一個保留的EtherType,用于唯一地識別Powerlink的報文幀[1]。
其中:SID包括SoC(Start of Cyclic)、EoC(End of Cyclic)、PollReq、PollRes、AsyncInvite、AsyncSend、AsyncAckNack;DA為目標地址;SA為源地址。
2.1.2? Ethernet Powerlink的工作原理
雖然標準的以太網是以CSMA/CD技術為基礎的,但CSMA/CD的工作原理決定了它不能實現通信的確定性,于是Ethernet Powerlink引入了SCNM(時間槽通信網絡管理)算法來保證實時以太網通信的確定性。
SCNM給同步數據和異步數據分配時槽,保證在同一時間只有一個設備可以占用網絡媒介,從而徹底杜絕了網絡沖突的發生。Ethernet Powerlink在通信管理上引入了管理節點(MN)和控制節點(CN)。整個網絡有唯一的管理節點,所以控制節點在管理節點上登記組態,管理節點對網絡進行統一調度,為各個節點之間數據通信分配時間信道。只有管理節點可以獨立地發送數據,可以以廣播的形式或指定發送;而控制節點只有在得到允許后才能發送數據,且僅以廣播的形式,其他的節點可以接收數據并進行監督。對于實時數據,信道時間較窄,可以精確管理;對于標準以太網數據包,首先拆成小包,然后納入相應的信道進行管理,因而數據也是確定性的[2]。
時間槽通信的周期包括開始階段、同步階段、異步階段和空閑階段,如圖2所示。
?
圖2? Powerlink的通信周期
每個階段的時間由管理節點預先設置,長度可以不同。管理節點隨時監控循環時間,以保證預設的時間不會發生沖突,一旦沖突發生,將自動延續到下一個循環的開始位置。
開始階段:管理節點廣播發送SoC幀開始通信周期。此幀發出后,各節點就此同步。只有SoC幀由時間控制,其他幀由事件控制。
同步階段: 所有節點進行同步信息交換。管理節點按照一個預先定義的順序給某站發送一個PollPeq幀,要求此節點發送數據;此節點得到允許后以廣播的形式發出一幀PollRes回應信息,所有節點都可以接收到這幀數據,并對這幀數據進行監控,也包括那些應該得到這幀數據的節點。PollReq和PollRes都可以傳輸應用數據。管理節點循環訪問完所有節點后廣播發送EoC幀指示同步結束。
異步階段:當確認隊列中無實時數據交換需要時,系統進入異步階段,異步通信主要傳輸標準以太網數據流。如果控制節點要發送異步數據,會在PollRes幀中通知管理節點。管理節點查詢異步數據請求對列,發送“異步數據發送邀請(AInvite)”給要發送異步數據的節點。這時控制節點就可以發送異步數據到指定的節點。通過時間槽通信發送的數據報文會在接收節點還原成原始數據包。
空閑階段:在完成異步傳送數據后尚剩下的時間段。在這個時間段,所以網上的節點都處于等待狀態,等待下一循環的開始。這個時間是個變量,也可能是0。
Ethernet Powerlink在通信管理上引入的時間槽通信網絡管理,使每個通信周期可以有對應的時間域用于傳輸實時數據和標準以太網數據流,既能在保證數據通信的實時性要求,又能傳輸標準的以太網數據,實現與標準以太網的兼容。
目前,實時開放的Ethernet Powerlink工業以太網已順利通過IEC國際標準。所有文檔都已通過IEC組委會批準,Ethernet Powerlink已被納入IEC國際標準617842、61158300、61158400、61158500和61158600。
2.2? 總線內存管理和IEEE1588機制
這種解決方法就是由德國倍福公司提出的EtherCAT(Ethernet for Control Automation Technology)。它得到了ETG組織的支持,是一個可用于現場級的超高速I/O網絡,使用標準的以太網物理層和常規的以太網卡,傳輸介質可以是雙絞線或光纖。拓撲結構可以是線型、樹型和星型結構。EtherCAT使網絡性能達到一個新的境界,可以在30 μs內處理1 000個I/O的刷新,包括循環的時間;可以在一個以太網幀中交換多達1 468個字節的協議數據(這幾乎相當于12 000個數字的輸入或輸出),且僅需300 μs。同時,采用IEEE1588標準規定的精確時間同步機制實現分布時鐘精確同步,保證了控制器的同步時間偏差小于1 μs。
EtherCAT報文幀格式采用標準以太網的幀頭和幀尾,且幀頭中Type段的值為0x88A4時,是一個唯一識別EtherCAT報文的標志。EtherCAT的報文直接包括在以太網數據中,且在數據區域并不是只有一個EtherCAT的報文,而是包括n個報文。n表示在系統中所包含的節點的個數。每個報文中包括幀頭、數據和WKC(WorKing Counter),用于記錄通過報文可以成功尋址的設備數量。EtherCAT報文幀格式如圖3所示。
?
圖3? EtherCAT報文幀格式
EtherCAT突破了其他以太網的解決方案的限制,不必在每個連接點接收以太網數據包,然后進行解碼并復制為過程數據。而且為了避免通信總線傳輸的延遲,德國倍福公司率先在EtherCAT中使用了FMMU(Fieldbus Memory Management Unit)前沿技術。整個系統只有一個主站用于系統的控制,其他的都是從站,當數據報文從主站被發出以后,每個從站中的FMMU就可以讀出數據報文中指定到此的數據。同樣,輸入數據可以在數據報文通過時插入到報文中,報文僅有幾ns延遲。網絡內的最后一個從站向主站發送一個完整的幀,以形成和創建一個物理和邏輯環。EtherCAT還通過內部優先級系統,使實時以太網幀比其他的數據(如組態或診斷數據等)具有更高的優先級。組態數據只在傳輸實時數據的間隙中傳輸(如果時間間隙足夠傳輸),或者通過特定的通道傳輸[3]。
在同步方面,EtherCAT采用IEEE1588標準中定義的精確時鐘同步機制,通過一個同步信號周期性地對網絡中所有站點的時鐘進行校正同步,可以使基于以太網的分布式運動控制系統達到精確同步。這在廣泛要求同時動作的分布過程中顯得尤為重要,而分布時鐘的精確校準是同步的最有效解決方案。在EtherCAT中,數據交換是完全基于硬件“主時鐘”和“子時鐘”的。每個時鐘可以簡單和準確地確定另一個時鐘的實時偏移量,分布時鐘基于該值進行調整,這意味著它可以在網絡范圍內提供信號抖動小于1 μs的、非常精確的時鐘基。而且高性能分布時鐘不僅可以用于同步,還可以用于提供數據采集時本地時間的精確信息。同時,EtherCAT引入了時間戳數據類型作為擴展,使得對于速度的精確計算比自由同步誤差測量技術更加精確。
EtherCAT作為一種可用于現場級的超高速的I/O網絡,在技術方面已經開發出專用的芯片和從站控制器,也已經成為IEC617842標準的一部分。
2.3? 網段分隔和通信調度管理
《EPA通信標準》是我國第一個擁有自主知識產權的現場總線國家標準,全稱是《用于工業測量與控制系統的EPA通信標準》。它是在國家科技部“863”計劃的支持下,由浙江大學、浙大中控、中科院沈陽自動化研究所、重慶郵電學院、清華大學和大連理工大學等單位聯合成立的標準起草小組,經過3年多的技術攻關,而提出的基于工業以太網的實時通信控制系統解決方案。
在EPA系統中,將控制網絡劃分為若干個控制區域,每個控制區域為一個微網段。這種方案能夠完全避免沖突的發生,每個微網段通過EPA網橋與其他網段分隔,該微網段內EPA設備間的通信被限制在本控制區域內進行,而不會占用其他網段的帶寬資源。處于不同微網段內的EPA設備間的通信,需由相應的EPA網橋轉發控制。EPA網橋至少有2個EPA接口,當它需要轉發報文時,首先檢查報文中的源IP地址、目的IP地址和EPA服務標識等信息,以確認是否需要轉發,并確定報文轉發路徑。因此,任何廣播報文的轉發也將受到控制,不會發生采用一般交換機所出現的廣播風暴。這一方案比單純集線器方式的反應速度更快,抖動也更小。
2.3.1? 實時問題的解決方案
為了提高網絡的實時性能,EPA對ISO/IEC8802.3協議規定的數據鏈路層進行了擴展,增加了一個EPA通信調度管理實體(Communication Scheduling Management Entity,CSME)。CSME不改變IEC8802.3數據鏈路層提供的服務,也不改變與物理層的接口,只是完成對數據報文的調度管理,包括周期報文和非周期報文的調度。對于非周期報文,CSME不作任何處理直接傳輸;而對于周期性的報文,則要先根據事先組態好的控制程序和優先級大小,傳送給數據傳送設備,經過處理后再傳到網絡上,以避免同時向網絡上發送數據,產生報文沖突。
2.3.2? 通信調度機制
在周期報文傳輸階段,每個EPA設備向網絡上發送的報文是包含周期數據的報文。周期數據是指與過程有關的數據,例如需要按控制回路的控制周期傳輸的測量值、控制值,或功能塊I/O之間需要按周期更新的數據。周期報文發送的優先級應為最高。
在非周期報文傳輸階段,每個EPA設備向網絡上發送的報文包含非周期數據的報文。非周期數據是指用于以非周期方式在兩個通信伙伴間傳輸的數據,如程序的上下載數據、變量讀/寫數據、事件通知和趨勢報告等,以及ARP、RARP、HTTP、FTP、TFTP、ICHP和IGMP等應用數據。非周期報文按其優先級高低,IP地址大小及時間有效方式發送。EPA通信周期如圖4所示。
?
圖4? EPA通信周期
目前為止,EPA標準也是IEC617842標準的成員,且在產品開發和工程應用上取得了較好的基礎,已開發出EPA變送器、執行器、現場控制器、數據采集器、遠程分散控制站等產品,基于EPA的分布式網絡控制系統也已在化工廠得到成功的應用。
結語
本文所介紹的3種實時以太網的解決方案是目前市場上應用較廣和關注度較高的新型實時以太網方案。它們都在自己的方案中引入獨特的技術,來解決標準以太網用于工控領域不能滿足實時性要求的問題,打破以太網應用于控制系統現場級的瓶頸。在工業現場級通信中,以前的現場級標準一直沒能統一,希望在未來實時以太網技術能夠向統一的、更深的方向發展。
?
















 工商網監
工商網監
評論