有朋友研究成像探測(cè)儀嗎(地下探寶)
2016-10-26 22:49:53
`實(shí)驗(yàn)名稱:液晶透鏡爬山自動(dòng)對(duì)焦算法研究研究方向:光學(xué)成像技術(shù)實(shí)驗(yàn)內(nèi)容:液晶透鏡作為對(duì)焦元件,實(shí)現(xiàn)光學(xué)成像系統(tǒng)的自動(dòng)對(duì)焦。測(cè)試目的:測(cè)試液晶透鏡對(duì)焦精度測(cè)試設(shè)備:相機(jī)、鏡頭、函數(shù)發(fā)生器、高壓放大器
2020-05-18 17:32:57
類似的研究就使新的研究沒有意義。人們永遠(yuǎn)需要更快的器件,更寬的動(dòng)態(tài)范圍,更多的像素和更低的噪聲。 1 CCD成像器件的概念及其分類 電荷耦合器件是一種金屬-氧化物-半導(dǎo)體結(jié)構(gòu)的新型器件,其基本結(jié)構(gòu)
2018-11-02 16:01:20
查閱 資料了解該課題研究的目的意義及其現(xiàn)狀;(2)掌握走時(shí)層析成像的原理和方法;(3) 采用SIRT和ART編程實(shí)現(xiàn)反演算法;求指導(dǎo)有結(jié)果重金感謝。急求{:4:}
2013-05-23 15:00:32
,用于SAR系統(tǒng)性能的檢驗(yàn)以及測(cè)試,并能評(píng)估各種成像算法,分析出建立在不同模型上的算法的有效性。近年來,國(guó)內(nèi)外許多院校和科研機(jī)構(gòu)都投入了大量的人力和物力進(jìn)行合成孔徑雷達(dá)模擬技術(shù)的研究。伴隨著SAR的研究
2019-07-22 06:29:35
`SAR: SAR的英文全稱為Specific Absorption Rate,中文一般稱為電磁波吸收比值或比吸收率。 是手機(jī)或 無(wú)線產(chǎn)品之電磁波能量吸收比值,其定義為:在外電磁場(chǎng)的作用下,人體內(nèi)將
2011-11-07 15:51:12
關(guān)于車載GPS定位監(jiān)控系統(tǒng)的分析與研究
2021-05-14 06:48:00
基于FPGA的FFT算法研究
2012-08-24 01:09:50
。目前,SAR圖像分類多是基于單通道圖像數(shù)據(jù)。多通道SAR數(shù)據(jù)極大地豐富了地物目標(biāo)信息量,利用多通道數(shù)據(jù)進(jìn)行分類,是SAR圖像分類的重要發(fā)展方向。本文提出基于多通道分類合成的SAR圖像分類算法。該算法首先
2010-04-23 11:52:48
怎么實(shí)現(xiàn)ADS7056 SAR ADC的熱成像應(yīng)用的模擬前端電路設(shè)計(jì)?
2021-06-16 08:19:29
有朋友研究成像探測(cè)儀嗎(地下探寶)
2016-10-26 22:45:14
兩通道DPCA動(dòng)目標(biāo)檢測(cè)原理是什么?基于機(jī)載單通道SAR數(shù)據(jù)的地面運(yùn)動(dòng)目標(biāo)檢測(cè)算法
2021-06-03 06:04:06
激光雷達(dá)距離像背景抑制算法研究相干激光成像雷達(dá)距離像處理的一個(gè)重要內(nèi)容就是進(jìn)行背景抑制。利用原始強(qiáng)度像的均值信息進(jìn)行距離像的背景抑制因?yàn)閺?qiáng)度像受到噪聲影響而效果不佳,改進(jìn)算法加入了強(qiáng)度像的噪聲濾除
2009-08-08 09:40:21
了適合于吉林省高速公路管理的信息化水平的車輛動(dòng)態(tài)監(jiān)控系統(tǒng)的總體架構(gòu)。通過對(duì)坐標(biāo)轉(zhuǎn)換技術(shù)的研究,實(shí)現(xiàn)了電子地圖數(shù)據(jù)和GPS 數(shù)據(jù)之間格式的完全統(tǒng)一;提出了基于地圖索引機(jī)制的匹配算法,并對(duì)算法進(jìn)行了設(shè)計(jì),給出
2009-04-16 13:47:49
電容層析成像技術(shù)具有非侵入、響應(yīng)快及易于安裝等特點(diǎn)。圖像的重建算法與技術(shù)是電容成像在工業(yè)實(shí)際中得以應(yīng)用的關(guān)鍵。近年來在圖像重建方面的研究取得了較大的進(jìn)展,Tikhonov
2009-01-07 10:43:03 16
16 討論了距離向去調(diào)頻聚束模式SAR信號(hào)的回波模型及特點(diǎn),通過對(duì)聚束SAR信號(hào)的時(shí)、頻域關(guān)系的分析,給出了適合去調(diào)頻后的聚束SAR數(shù)據(jù)的成像算法。該算法結(jié)合了SPECAN算法高效和
2009-04-19 19:25:2233 介紹了基于距澎多普勒算法的成像處理器方位向處理,并針對(duì)機(jī)載合成孔徑雷達(dá)(SAR)實(shí)時(shí)成像探討了采用DSP并行計(jì)算技術(shù)實(shí)現(xiàn)方位壓縮的原理和結(jié)果。
2009-05-08 16:57:1230 流水線結(jié)構(gòu)的高效SAR快視成像處理器
2009-05-08 17:16:4723 針對(duì)大斜視角下合成孔徑雷達(dá)信號(hào)時(shí)域距離校正后的特點(diǎn),提出了改進(jìn)的階梯變換算法,在各個(gè)子孔徑分別采用不同調(diào)頻斜率的參考信號(hào)進(jìn)行去斜處理,解決了信號(hào)多普勒調(diào)頻斜率
2009-05-14 19:56:488 信號(hào)短暫缺失下的非完備GPS定位算法研究:該文提出一種在城市峽谷等復(fù)雜環(huán)境中衛(wèi)星被頻繁遮擋造成衛(wèi)星信號(hào)短暫缺失的非完備條件下,利用少于3顆有效衛(wèi)星,實(shí)現(xiàn)滿足一定精度要
2009-10-20 18:00:0218 非對(duì)稱星-機(jī)雙基SAR 成像算法研究是雙基SAR 研究的難點(diǎn)問題之一。該文針對(duì)以GPS 衛(wèi)星為照射源的連續(xù)波星-機(jī)雙基SAR,提出一種基于數(shù)值計(jì)算的快速雙基距離徙動(dòng)成像算法(RMA)。此方
2009-11-09 15:09:0922 該文以方位平移不變的雙基SAR 為研究對(duì)象,分析了雙基回波多普勒的距離空變性,提出了一種考慮多普勒空變性的雙基解多普勒模糊算法。解模糊過程中利用數(shù)值計(jì)算得到不同距離
2009-11-09 15:10:424 基于分?jǐn)?shù)階傅里葉變換(FrFT)和多通道雜波抑制干涉技術(shù),提出一種同步軌道星機(jī)雙基地SAR地面慢速運(yùn)動(dòng)目標(biāo)檢測(cè)和參數(shù)估計(jì)方法。首先根據(jù)同步軌道星機(jī)雙基地SAR的特點(diǎn),給出該模
2009-11-11 15:28:5710 由于存在相干斑噪聲的影響,使得常規(guī)的圖像分割技術(shù)應(yīng)用于SAR 圖像時(shí),效果往往較差。該文提出一種新人工免疫系統(tǒng)SAR 圖像分割算法,算法首先提取每幅圖像的紋理特征,并對(duì)
2009-11-13 11:36:5816 該文在現(xiàn)有雙基SAR 成像研究的基礎(chǔ)上,提出了同航線雙基聚束式SAR 成像的算法。該算法首先對(duì)回波信號(hào)進(jìn)行方位預(yù)處理實(shí)現(xiàn)信號(hào)支撐區(qū)的不模糊,然后利用傳統(tǒng)波數(shù)域的成像算法聚
2009-11-13 13:45:0713 該文研究了基于Chirp Scaling 原理實(shí)現(xiàn)雙基聚束SAR 成像的極坐標(biāo)格式算法(Polar Format Algorithm,PFA)。PFA 通過兩個(gè)一維插值來實(shí)現(xiàn)數(shù)據(jù)的極坐標(biāo)格式轉(zhuǎn)換,插值計(jì)算量較大。該文基于發(fā)射信
2009-11-13 13:50:1120 該文研究了雙基地MIMO雷達(dá)測(cè)向交叉多目標(biāo)定位方法,提出了一種基于傳播算子的雙基地MIMO雷達(dá)快速多目標(biāo)定位算法。該方法避免了一般子空間方法中占主要運(yùn)算量的協(xié)方差矩陣估計(jì)
2009-11-13 13:56:3018 該文使用HQBA(Half Quasi-Bistatic Angle)的概念和駐定相位原理,推導(dǎo)平移不變雙基地SAR 點(diǎn)目標(biāo)回波信號(hào)的二維精確頻譜,深入分析頻譜中各相位項(xiàng)的物理意義,提出基于HQBA 計(jì)算的RD 成像
2009-11-17 15:17:199 已有文獻(xiàn)中提出的基于收發(fā)波束指向控制的波束同步方法,在非合作式的星機(jī)雙基地SAR 中不適用。根據(jù)星機(jī)雙基地SAR“遠(yuǎn)發(fā)近收”的特點(diǎn),提出了一種寬波束接收工作模式用于提高
2009-11-18 14:41:465 單基地高頻地波雷達(dá)易受到電子干擾、隱身武器等威脅,建立單雙基地復(fù)合高頻地波雷達(dá)網(wǎng)是解決這一問題最易工程實(shí)現(xiàn)的途徑。該文首次以單雙基地復(fù)合高頻雷達(dá)網(wǎng)為背景,針對(duì)
2009-11-18 14:45:274 該文研究了基于DEM(Digital Elevation Model)的高精度重軌干涉SAR 運(yùn)動(dòng)補(bǔ)償算法。分析了平地假設(shè)及波束中心近似造成的殘余運(yùn)動(dòng)誤差的影響,表明對(duì)重軌干涉SAR 系統(tǒng)進(jìn)行基于DEM 的高精度
2009-11-18 14:56:378 雙基地多載頻FMCW 雷達(dá)采用稀布陣發(fā)射多載頻FMCW(Frequency Modulated Continuous Wave)信號(hào),陣列接收目標(biāo)回波。受速度和加速度的調(diào)制,機(jī)動(dòng)目標(biāo)回波多普勒頻譜展寬,導(dǎo)致雷達(dá)檢測(cè)性能下
2009-11-20 15:58:4721 針對(duì)調(diào)頻連續(xù)波SAR 與脈沖式SAR 工作體制的不同,從而帶來不同的回波信號(hào)形式,該文對(duì)基于調(diào)頻連續(xù)波的大斜視SAR 回波信號(hào)進(jìn)行建模,分析信號(hào)的特征,揭示平臺(tái)的連續(xù)運(yùn)動(dòng)在距
2009-11-20 16:06:5816 該文提出利用MIMO-SAR 系統(tǒng)實(shí)現(xiàn)大測(cè)繪帶成像的方法。在該系統(tǒng)中,利用離散頻率編碼信號(hào)實(shí)現(xiàn)高距離分辨;同時(shí)采用低脈沖重復(fù)頻率(Pulse Repetition Frequency, PRF)來獲得不模糊的大測(cè)繪
2009-11-20 16:09:5718 雙基SAR 距離徙動(dòng)由于存在兩個(gè)雙曲線形式,使用傳統(tǒng)的駐定相位原理方法難以解析得到雙基下的目標(biāo)二維頻譜。該文總結(jié)了LBF 方法,級(jí)數(shù)反演方法,利用雙基成像幾何的瞬時(shí)頻率方
2009-11-20 16:17:5512 該文針對(duì)多載頻陣列發(fā)射、單天線接收的雙基地高頻地波SIAR,分析了通道幅相誤差對(duì)空時(shí)二維超分辨的影響,研究了發(fā)射通道幅相誤差的自校準(zhǔn)方法。該方法利用直達(dá)波信號(hào),將傳
2009-11-21 14:04:279 精確的運(yùn)動(dòng)補(bǔ)償是高分辨率機(jī)載SAR 成像的關(guān)鍵,尤其對(duì)于機(jī)載小平臺(tái)和大擾動(dòng)情況下的成像具有重要意義。為了獲得高質(zhì)量的SAR 圖像,該文結(jié)合波數(shù)域算法,考慮運(yùn)動(dòng)誤差的二維空
2009-11-24 14:59:5014 該文通過對(duì)機(jī)載雙基地SAR 非移變幾何模型的分析,建立了雙距離變量域的回波信號(hào)模型,由于回波數(shù)據(jù)是在距離和域,該文推導(dǎo)了距離和變量與雙距離變量的轉(zhuǎn)換關(guān)系,解決了該模
2009-11-25 14:32:3312 準(zhǔn)確的運(yùn)動(dòng)補(bǔ)償是高分辨率機(jī)載SAR 成像的關(guān)鍵。為了獲得高質(zhì)量的斜視SAR 圖像,該文詳細(xì)研究了用改進(jìn)的波數(shù)域算法處理帶有運(yùn)動(dòng)誤差的斜視SAR 數(shù)據(jù),提出了一種改進(jìn)的斜視SAR 運(yùn)
2009-11-25 14:40:0519 SAR 成像的本質(zhì)是相干成像,通過對(duì)SAR 圖像進(jìn)行相干處理,可以增強(qiáng)目標(biāo)與背景之間的對(duì)比度,從而提高小目標(biāo)的檢測(cè)率。本文提出了一種新的基于SAR 圖像相干性的斑點(diǎn)噪聲濾波
2009-12-07 11:06:4314 討論了機(jī)-機(jī)雙基地雷達(dá)空間同步,介紹了DBF 同時(shí)多波束空間同步法,推導(dǎo)了接收波束方位角和俯仰角公式。分析了采用DBF 技術(shù)的脈沖追趕空間同步法的基本原理,介紹了實(shí)現(xiàn)
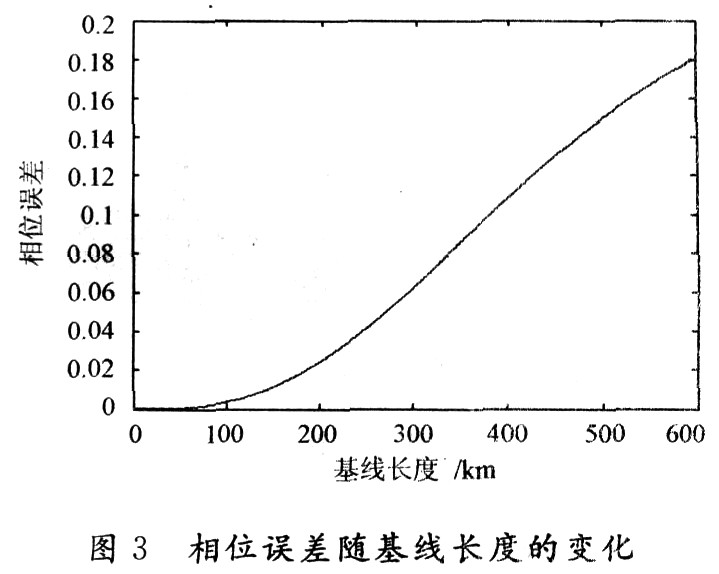
2009-12-07 14:10:4710 FMCW SAR具有體積小、重量輕、成本低、分辨率高等一系列優(yōu)點(diǎn),相位誤差是SAR成像質(zhì)量下降的主要原因,因此,相位誤差對(duì)FMCW SAR成像質(zhì)量的影響將成為一個(gè)熱點(diǎn)。首先分析了線性相
2009-12-16 16:11:4122 本文重新推導(dǎo)了Lynett 和Liu 的水平二維內(nèi)波傳播模型并在修正其幾處錯(cuò)誤后將其應(yīng)用到了序列SAR 圖像的內(nèi)波數(shù)值模擬上。同時(shí)結(jié)合M4S 模型對(duì)數(shù)值模擬結(jié)果進(jìn)行了SAR 成像仿真,結(jié)
2009-12-19 14:22:1715 在散射波干擾方式下,SAR 干擾信號(hào)的多普勒頻率與雷達(dá)回波信號(hào)不一致,造成虛假圖像散焦和成像位置偏移,甚至不能成像,只能算是一種噪聲壓制干擾。本文提出了一種新的散射
2009-12-22 16:15:5422 L2C 是GPS 現(xiàn)代化Block IIR-M 衛(wèi)星發(fā)射的一個(gè)新民用信號(hào)。為了估計(jì)GPS L2C 的捕獲性能,該文首先研究了GPS L2C 捕獲算法,即本地產(chǎn)生的歸零CM,利用FFT 快速實(shí)現(xiàn)短碼的捕獲后,利用短碼
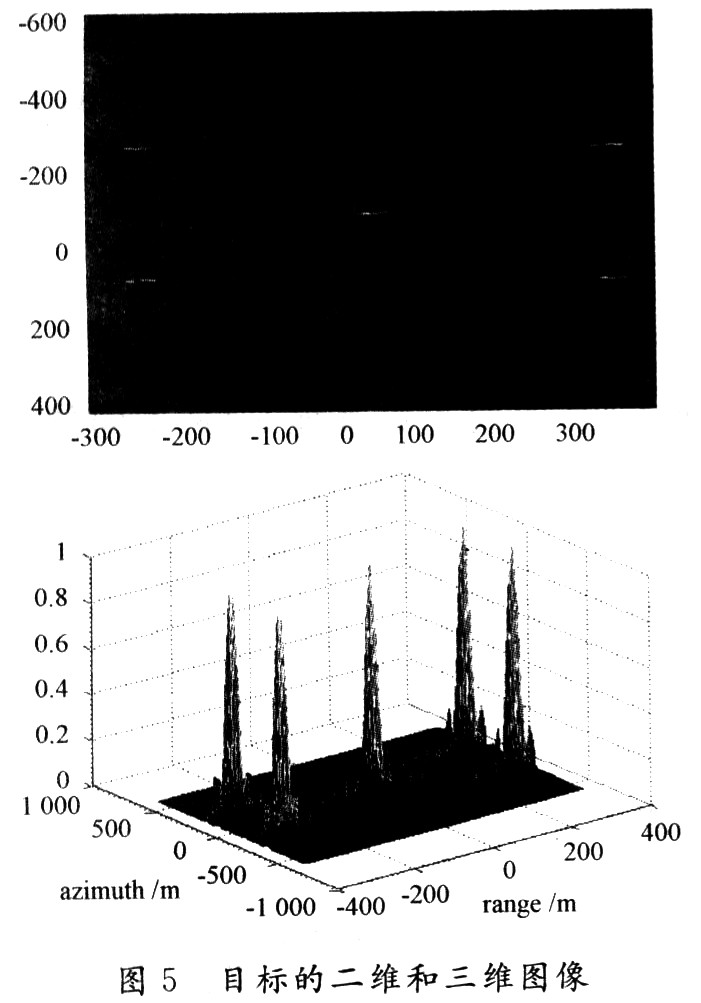
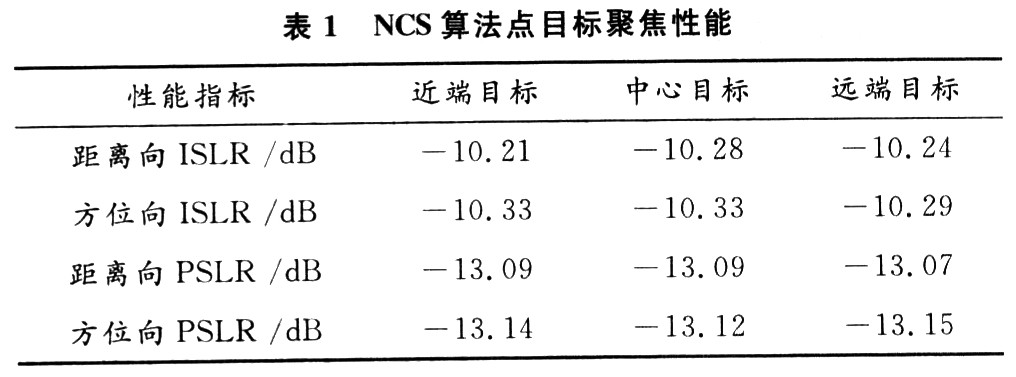
2010-02-08 15:51:5221 該文首先建立了串行雙站斜視SAR 的幾何模型,給出了雷達(dá)回波的數(shù)學(xué)表達(dá)式,推導(dǎo)了它的2 維頻譜并對(duì)其特點(diǎn)做了分析。在2 維頻域內(nèi)先用聚焦函數(shù)對(duì)觀測(cè)場(chǎng)景中心的點(diǎn)目標(biāo)進(jìn)行精確
2010-02-09 11:33:1212 雙基SAR 的收發(fā)分置使干擾系統(tǒng)對(duì)接收機(jī)難以準(zhǔn)確定位,因此具有強(qiáng)抗干擾能力。該文分析了接收機(jī)不能精確定位情況下的欺騙式干擾性能,在雙基SAR 欺騙式干擾模型的基礎(chǔ)上,研究
2010-02-09 14:16:145 導(dǎo)彈的俯沖加速運(yùn)動(dòng)所帶來的較大距離徙動(dòng)使得SAR 成像難度較大。該文根據(jù)彈載SAR 平臺(tái)的運(yùn)動(dòng)特點(diǎn),使用高階逼近模型建立了SAR 的回波信號(hào)模型。考慮到大場(chǎng)景下的距離空變問題
2010-03-05 16:53:2713 該文針對(duì)大斜視SAR 回波信號(hào)的大距離走動(dòng)、小距離彎曲的特點(diǎn),提出了一種將時(shí)域去走動(dòng)和CS 算法相結(jié)合的成像算法。首先在時(shí)域校正距離走動(dòng),然后在頻域校正距離彎曲,最后通
2010-03-05 16:55:4712 單多基地有源無(wú)源定位技術(shù):第一章 空間定位原理第二章 空間定位方法及誤差分析第三章 定位誤差的幾何分布第四章 雙基地系統(tǒng)定位方法及誤差分析第五章 雙基地系統(tǒng)定位性能
2010-03-18 18:10:190 該文提出一種基于目標(biāo)檢測(cè)的SAR 圖像匹配算法。針對(duì)SAR 圖像的特點(diǎn),該算法先檢測(cè)SAR 圖像的強(qiáng)散射目標(biāo),接著計(jì)算各強(qiáng)散射目標(biāo)的質(zhì)心,對(duì)主、輔圖像的質(zhì)心點(diǎn)集合進(jìn)行Delaunay 三
2010-04-24 08:49:2023 針對(duì)機(jī)載平臺(tái)難以同時(shí)滿足多基線SAR 層析3 維成像所要求的短基線及大孔徑問題,本文提出一種基于稀疏信號(hào)表示的機(jī)載SAR 層析3 維成像算法。首先基于高頻率SAR 目標(biāo)的多散射中
2010-06-23 14:26:010 將GPS導(dǎo)航與INS導(dǎo)航技術(shù)相結(jié)合應(yīng)用于低速載體,在低速、低機(jī)動(dòng)條件下,研究了在使用低成本、低精度的慣性元件時(shí)的導(dǎo)航算法和導(dǎo)航性能。通過對(duì)常規(guī)GPS/INS導(dǎo)航技術(shù)特別是所應(yīng)用的
2010-07-23 11:03:2512 基于IDL語(yǔ)言運(yùn)算快速且具備完善的信號(hào)處理及圖像處理功能的優(yōu)勢(shì),設(shè)計(jì)開發(fā)一個(gè)合成孔徑雷達(dá)(SAR)成像軟件平臺(tái),完成雙站SAR成像的仿真,并具備一定的數(shù)據(jù)分析和圖像處理功
2010-12-27 15:47:580 最新GPS研究和使用報(bào)告(上)
[GPS提高接收精確度的方法]
客戶端提高GPS精度:目前單GPS系統(tǒng)提供的定位精度是優(yōu)于10米,而
2010-01-29 10:38:54 422
422 本文探討了醫(yī)療成像算法的當(dāng)前趨勢(shì)、成像模式的融合和實(shí)現(xiàn)這些算法的可擴(kuò)展平臺(tái)。現(xiàn)場(chǎng)可編程門陣列為可擴(kuò)展CPU平臺(tái)提供數(shù)據(jù)采集和協(xié)處理支持,使得更復(fù)雜的成像成為可能
2010-05-31 14:10:48541 摘要:根據(jù)星載SAR成像算法的原理,提出了一種用FPGA實(shí)現(xiàn)該成像處理器的有效方法,該處理器的體系結(jié)構(gòu)由算法直接映射而來,同時(shí)根據(jù)算法內(nèi)在的時(shí)間關(guān)系將流水處理和并行處理相結(jié)合,從而極大地減少了處理時(shí)間,根據(jù)算法各運(yùn)算對(duì)數(shù)據(jù)的精度要求不同,將浮點(diǎn)運(yùn)算和定
2011-02-27 12:55:5064 為了解決景象匹配導(dǎo)航系統(tǒng)中圖像存在旋轉(zhuǎn)誤差以及遮擋問題,提出了一種基于相對(duì)點(diǎn)矩的SAR圖像匹配算法。Harris角點(diǎn)提取算子結(jié)合亞像素精確定位算法可以獲得高精度的特征點(diǎn)坐標(biāo),
2011-04-12 18:47:3932 本文提出了一種SAR 成像的方法,它的特點(diǎn)是在二維頻域完成較準(zhǔn)確距離徙動(dòng)校正,而在時(shí)域內(nèi)實(shí)現(xiàn)聚焦處理,這樣使算法簡(jiǎn)便易行,可以在較低的脈沖重復(fù)頻率下實(shí)現(xiàn)成像,本文還在提
2011-05-19 18:15:010 與單站SAR 相比, 雙站 SAR 的幾何關(guān)系更復(fù)雜, 運(yùn)動(dòng)誤差來源更多, 因而運(yùn)動(dòng)補(bǔ)償難度更大. 本文提出了一種有效的雙站SAR 運(yùn)動(dòng)誤差的估計(jì)和補(bǔ)償方法. 文中首先根據(jù)雙站SAR 運(yùn)動(dòng)誤差的幾何
2011-06-20 16:52:240 本文分析了主要信號(hào)累積技術(shù)的優(yōu)缺點(diǎn),討論了弱信號(hào)環(huán)境下GPS信號(hào)檢測(cè)值的概率統(tǒng)計(jì)分布特性,在此基礎(chǔ)上結(jié)合快速相干累積算法,提出了利用幀同步信息的微弱GPS信號(hào)捕獲算法,并
2011-08-25 13:51:382502 
本內(nèi)容提供了基于可擴(kuò)展編碼的多視角視頻編碼研究
2011-09-26 15:39:3025 提出了一種具有高并行度機(jī)載SAR實(shí)時(shí)并行成像算法實(shí)現(xiàn)方案。對(duì)實(shí)測(cè)數(shù)據(jù)進(jìn)行成像處理結(jié)果表明,文中所提方案能夠滿足實(shí)時(shí)成像處理要求,同時(shí)與傳統(tǒng)實(shí)時(shí)成像處理系統(tǒng)相比較,能夠大幅
2011-11-30 17:25:0655 文中從脈沖壓縮信號(hào)時(shí)延和頻移強(qiáng)耦合特性入手,結(jié)合彈載SAR的前斜視RD成像算法,推導(dǎo)了彈載SAR的移頻干擾輸出形式。結(jié)果表明,方位維的位移量和移頻量不成線性關(guān)系,但在較小的移頻量
2012-01-10 17:18:4024 結(jié)合機(jī)載下視三維SAR和曲線合成孔徑雷達(dá)(CSAR),提出了一種下視圓周SAR的三維成像結(jié)構(gòu)。在此結(jié)構(gòu)下推導(dǎo)回波信號(hào)模型,發(fā)現(xiàn)回波信號(hào)中切航向和沿航向存在二維耦合項(xiàng),使得傳統(tǒng)的RD算法
2012-02-10 16:44:3039 針對(duì)彈載合成孔徑雷達(dá)(SAR)成像存在運(yùn)動(dòng)參數(shù)抖動(dòng)的問題,分析了不規(guī)則運(yùn)動(dòng)造成圖像幾何失真的機(jī)理,提出了一種基于多項(xiàng)式逼近的彈載SAR線性調(diào)頻(LFM)信號(hào)前斜視成像幾何形變
2012-11-09 16:39:1929 基于GPS導(dǎo)航衛(wèi)星的雙基地雷達(dá)由于其良好的隱蔽性、反隱身能力以及抗干擾能力,簡(jiǎn)單的系統(tǒng)結(jié)構(gòu),低廉的造價(jià)等優(yōu)點(diǎn),近年來在國(guó)內(nèi)外掀起了新的研究熱潮。然而由于輻射源功率以及系統(tǒng)結(jié)構(gòu)的原因,傳統(tǒng)的雙基地
2016-01-04 15:02:290 程序詳細(xì)介紹了GPS捕獲的串行碼二維搜索算法,供初學(xué)者參考
2016-03-11 17:43:381 GPS一維彈道修正引信修正算法研究,下來看看
2016-12-17 17:01:467 并行機(jī)載雙站斜視SARELBF_CS成像算法_冉金和
2017-01-07 15:53:300 高效機(jī)載SAR實(shí)時(shí)成像處理系統(tǒng)設(shè)計(jì)_楊磊
2017-01-07 16:00:431 二面角的雙基地散射特性分析_胡程
2017-01-08 11:07:010 功能磁共振成像視角下的腦功能連通性分析與腦可塑性_曾衛(wèi)明
2017-01-08 11:13:290 未知互耦下雙基地MIMO雷達(dá)陣列DOD和DOA估計(jì)算法_戴繼生
2017-01-08 11:13:291 基于軟件的GPS信號(hào)捕獲跟蹤算法研究
2017-05-25 08:46:2111 高精度,高時(shí)效性的要求。因此,本文在原有接收機(jī)跟蹤算法的基礎(chǔ)上,進(jìn)行了升級(jí)和優(yōu)化,開發(fā)了一個(gè)基于FPGA的GPS軟件接收機(jī)優(yōu)化的跟蹤算法,完成了跟蹤算法中噪聲帶寬、環(huán)路增益、快捕范圍、環(huán)路濾波器等關(guān)鍵參數(shù)的設(shè)置。本算法具有比之前傳統(tǒng)
2017-11-10 16:17:355 合成孔徑雷達(dá)(Synthetic aperture radar.SAR)是一種應(yīng)用非常廣泛的高分辨率成像雷達(dá),其具有全天候、多極化、多視角、多俯角獲取數(shù)據(jù)能力,對(duì)云層、煙霧等有較強(qiáng)的穿透能力
2017-11-27 09:25:592 進(jìn)的基于2D的去抖算法是由Shuaicheng Liu提出的對(duì)同一時(shí)段多特征點(diǎn)軌跡平滑。基于2D的方法雖然魯棒性較強(qiáng)、計(jì)算代價(jià)較小,但不能合理描述相機(jī)的運(yùn)動(dòng)模型,無(wú)法對(duì)其運(yùn)動(dòng)路徑和視角進(jìn)行優(yōu)化。 基于3D的視頻去抖技術(shù)以多視角幾何為基礎(chǔ),通過構(gòu)建相機(jī)運(yùn)
2017-12-11 11:01:502 在基于視角加權(quán)的多視角聚類中,每個(gè)視角的權(quán)重取值對(duì)聚類結(jié)果的精度都有著重要的影V向。針對(duì)此問題,提出熵加權(quán)多視角核K-means( EWKKM)算法,通過給每個(gè)視角分配一個(gè)合理的權(quán)值來降低噪聲視角
2017-12-17 09:57:111 隨機(jī)噪聲雷達(dá)具有良好的抗干擾性,與合成孔徑技術(shù)的結(jié)合能夠使其具有成像能力。然而,由于發(fā)射信號(hào)無(wú)固定的解析表達(dá),傳統(tǒng)的成像算法不能直接用于隨機(jī)噪聲SAR成像。本文在波數(shù)域成像算法的基礎(chǔ)上研究了一種
2018-01-08 10:34:282 SAR遙感衛(wèi)星具有全天候和全天時(shí)成像等技術(shù)特點(diǎn),在環(huán)境減災(zāi)、地質(zhì)勘探、農(nóng)林業(yè)和國(guó)防等領(lǐng)域得到了廣泛的應(yīng)用。在合成孔徑雷達(dá)(SAR)系統(tǒng)中,SAR通過對(duì)接收的目標(biāo)散射回波進(jìn)行二維壓縮處理實(shí)現(xiàn)對(duì)目標(biāo)場(chǎng)景
2018-02-01 16:02:551 通過研究多輸入多輸出(Multiple input and multiple out,MIMO)雷達(dá)的角度估計(jì)算法,針對(duì)色噪聲環(huán)境下雙基地MIMO雷達(dá)相干目標(biāo)角度估計(jì)問題,基于雙基地MIMO雷達(dá)
2018-03-02 11:52:061 和研究,提出利用去斜后的方位相位誤差作補(bǔ)償,再進(jìn)行相位梯度自聚焦(Phase gradient autofocus,PGA)處理,實(shí)現(xiàn)調(diào)制雷達(dá)回波的高質(zhì)量SAR成像。實(shí)測(cè)數(shù)據(jù)表明,本方法較好地解決了回波調(diào)制情況下的成像問題,對(duì)直升機(jī)平臺(tái)SAR成像具有重要的參考價(jià)值。
2018-03-07 16:42:121 在利用線性距離多普勒算法生成子圖像的前提下, 提出了一種基于像源與像點(diǎn)映射關(guān)系的距離多普勒域圖像幾何失真校正算法。該算法無(wú)需復(fù)雜的坐標(biāo)系轉(zhuǎn)換計(jì)算, 實(shí)現(xiàn)了360°范圍內(nèi)任意波束指向上SAR 子圖像幾何失真校正。地面點(diǎn)目標(biāo)仿真和實(shí)測(cè)數(shù)據(jù)成像結(jié)果證明了該算法的有效性。
2018-03-13 09:07:125255 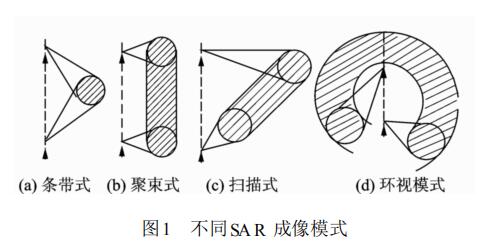
、功耗與實(shí)時(shí)性要求都很高的實(shí)時(shí)SAR成像系統(tǒng),其應(yīng)用十分廣泛。在整個(gè)有距離-多普勒(R-D)算法中方位脈沖壓縮系統(tǒng)是設(shè)計(jì)的關(guān)鍵。隨著FPGA芯片突飛猛進(jìn)的發(fā)展,實(shí)時(shí)雷達(dá)成像方位脈沖壓縮系統(tǒng)在FPGA上實(shí)現(xiàn)變成了可能。
2018-12-30 11:10:003331 
彈載SAR制導(dǎo)是將SAR技術(shù)應(yīng)用于主動(dòng)雷達(dá)導(dǎo)引頭,可有效提高全天候、全天時(shí)的探測(cè)能力。相對(duì)于其他模式的制導(dǎo)技術(shù),彈載SAR成像制導(dǎo)技術(shù)所需的數(shù)據(jù)存儲(chǔ)量和計(jì)算量大,導(dǎo)致其硬件成本、功耗、體積
2020-09-01 13:35:001348 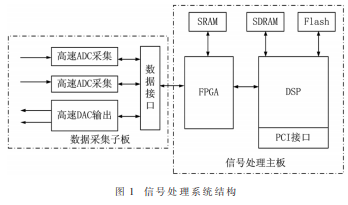
對(duì)星載SAR實(shí)時(shí)成像處理的研究目前主要集中在實(shí)時(shí)成像運(yùn)算器(SAR procesSor),而未見到實(shí)時(shí)成像系統(tǒng)(SAR imaging system)的研究,提出了一種CS算法的星載SAR實(shí)時(shí)成像
2021-01-22 14:29:2823 針對(duì)微型合成孔徑雷達(dá)(SAR)實(shí)時(shí)成像處理機(jī)高性能、小體積、低功耗的特點(diǎn)和要求,提出了一種基于FPGA實(shí)現(xiàn)微型SAR成像灰度量化、顯示驅(qū)動(dòng)的設(shè)計(jì)方案。采用StratixⅡEP2S180開發(fā)板
2021-01-26 15:30:1210 本文提出了一種用FPGA實(shí)現(xiàn)星載合成孔徑雷達(dá)實(shí)時(shí)成像處理器的方法,用來實(shí)現(xiàn)星載SAR的CS算法(或RMA算法).該實(shí)時(shí)成像處理器由7片Xilinx公司的商業(yè)FI:‘GA實(shí)現(xiàn),其中4片作為并行的處理
2021-02-05 15:22:4614 將全極化數(shù)據(jù)與SAR層析成像相結(jié)合,可獲取復(fù)雜地物更加準(zhǔn)確的三維結(jié)構(gòu)信息,其對(duì)地表濕度和地物結(jié)構(gòu)特性敏感,適用于獲取森林生物量和城市區(qū)域特征等信息的遙感獲取。本章介紹基于譜分析的極化層析SAR聚焦
2022-04-15 17:14:091461 能夠多角度探測(cè)目標(biāo)。傳統(tǒng)雷達(dá)只能獲取目標(biāo)的后向雷達(dá)散射特性。而使用雙基構(gòu)型,可以從前向、側(cè)向、后向多角度對(duì)目標(biāo)進(jìn)行探測(cè)。尤其是對(duì)隱身目標(biāo)的探測(cè)能力,大大強(qiáng)于傳統(tǒng)雷達(dá)。
2022-11-24 20:06:27943 合成孔徑雷達(dá)(SAR)三維成像技術(shù)可以消除目標(biāo)和地形在二維圖像上產(chǎn)生的嚴(yán)重混疊,顯著提升目標(biāo)的發(fā)現(xiàn)、識(shí)別和三維建模能力。
2023-01-16 14:12:46981 SAR有許多應(yīng)用,相關(guān)技術(shù)的進(jìn)步也正在將SAR系統(tǒng)推向以前未曾想到的領(lǐng)域,最近商業(yè)SAR星座的發(fā)展尤其如此。SAR已被用于地球和其他行星的遙感、遠(yuǎn)距離空間物體的三維成像、軌道空間碎片的成像、軍事應(yīng)用以及導(dǎo)航輔助。每個(gè)領(lǐng)域都有不同的目標(biāo)、獨(dú)特的問題和局限性,以及專門的SAR成像系統(tǒng)。
2023-02-11 10:15:00830 那什么是無(wú)源雷達(dá)?雷達(dá)沒有源怎么能叫雷達(dá)呢?雙基地又是個(gè)什么東?兩個(gè)加起來的雷達(dá)又是一個(gè)什么樣的雷達(dá)呢?
2023-09-15 09:24:02769 
電子發(fā)燒友網(wǎng)站提供《基于GPS的監(jiān)測(cè)定位系統(tǒng)算法研究與仿真.pdf》資料免費(fèi)下載
2023-10-12 09:54:520 雙基地雷達(dá)概念
雙基地雷達(dá)可以定義為發(fā)射機(jī)和接收機(jī)位于不同位置的雷達(dá),而不是常規(guī)的單基地雷達(dá)。
最早的雷達(dá)是雙基地的,直到脈沖波形和T/R開關(guān)的出現(xiàn)。
雙基地雷達(dá)可以使用自己的專用發(fā)射機(jī)或機(jī)會(huì)輻射源(發(fā)射機(jī))運(yùn)行。
2023-10-27 10:22:071023 
 電子發(fā)燒友App
電子發(fā)燒友App
























 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論