 電子發燒友App
電子發燒友App


摘要:通過多串口通信技術在金剛石合成控制系統中的應用,討論了32位Windows操作系統下,VC多串口通信技術的設計與實現方法,并運用面向對象方法和多線程技術設計了一個比較完善的串口通信類。闡述了用VC開發上位機與PLC之間的串口通信程序設計方法和實現技術。
1 引言
傳統的金剛石合成機控制系統是由一個PLC和一個可顯示終端構成。這種傳統的控制系統一般具有如下缺點:
(1) 系統所有的工作都由PLC完成,其控制精度較差,致使合成的金剛石質量較差;
(2) 顯示終端的平面尺寸過小,這一方面使得操作人員觀察系統的狀態很不方便,另一方面?也常常會引起誤操作;
(3) 金剛石合成工藝復雜,需控制的參數很多,但原控制系統不能對參數進行保存,這樣在根據不同產品和工藝要求對部分參數進行調整時,每次都必須重新設置所有的參數,操作非常麻煩;
(4) 界面不友好;
(5)不能通過控制系統自動考核操作人員的工作質量。
為了提高控制精度、方便操作,開發新的控制系統迫在眉睫。筆者針對以上問題,將IPC與PLC有機結合在一起,開發了一套新的控制系統。通過該系統可在上位機(IPC)和PLC之間通過RS-232與RS-485進行大量串口通信。
2 VC串口通信分析
在32位Windows系統下使用VC開發串口通信程序通常有如下4種方法:
(1)使用Microsoft公司提供的名為MSCOMM的通信控件;
(2)直接使用Windows應用程序接口(API);
(3)自行設計一個串口通信類;
(4)通過開發一個ActiveX控件來實現串口通信功能。
在上述幾種方法中,實際上還是使用Windows API函數,然后把串口通信的細節給封裝起來,同時提供給用戶幾個簡單的接口函數。上述幾種方法各有優缺點,但在實際情況下,大多數編程人員喜歡使用API函數自行設計串口通信類。
用Windows API函數進行串口通信的編程流程如圖1所示。其中打開串口是確定串口號與串口的打開方式;初始化串口用于配置通訊的波特率、每字節位數、校驗位、停止位和讀寫超時等;讀寫串口用于向串口進行發送數據和從串口接收數據;關閉串口用于將串口關閉并釋放串口資源(Windows系統下串口是系統資源)。
由于絕大多數控制系統中串口通信是比較費時的,而且監控系統還要進行數據處理和顯示等,所以一般采用多線程技術,并用AfxBeginThread()函數創建輔助線程來管理串口通信,這樣,主進程就能在進行串口讀寫的同時,處理數據并完成用戶指令的響應,但是設計時一定要處理好數據的共享問題。
串口讀寫既可以選擇同步、異步方式,也可以選擇查詢、定時讀寫和事件驅動方式。由于同步方式容易造成線程阻塞,所以一般采用異步方式;而查詢方式要占用大量的CPU時間,所以一般采用定時讀寫或者事件驅動方式,事件驅動方式相關文獻較多,故此重點討論定時讀寫方式。定時讀寫方式就是上位機向下位機發送固定格式的數據,在下位機收到后向上位機返回狀態信息數據。由于數據的傳輸需要時間,所有上位機發送數據后就調用_sleep()函數進行休眠,休眠的時間可根據需要進行不同的設置。這樣,可以節省CPU時間,以使系統能夠很好地進行監控工作和處理其它事務。
3 VC串口通信的設計與實現
筆者在Windows系統下,采用面向對象的方法和多線程技術,并使用Visual C6.0作為編程工具開發了一個通用串口通信類CSerialPort,該CSerialPort類封裝了串口通信的基本數據和方法,下面給出CSerialPort類的簡單介紹。
CSerialPort類頭文件中的主要成員變量和成員函數如下:
Class CSerialPort
{
private:
HANDEL m_hPort;
DCB m_Dcb;
COMMTIMEOUTS m_TimeOuts;
DWORD m_Error;
Public:
CSerialPort(); ?? //構造函數
virtual~CSerialPort(); ?? //析構函數
//InitPort() 函數實現初始化串口
BOOL InitPort(
char* str=“com1”,
UINT BaudRate=9600,
UINT Parity=0,
UINT ByteSize=8,
UINT StopBits=1,
UINT ReadMultiplier=0,
UINT ReadConstant=0,
UINT WriteMultiplier=10,
UINT WriteConstant=1000);
DCB GetDCB();? //獲得DCB參數
//SetDCB()函數實現設置DCB參數
BOOL SetDCB(
UINT BaudRate=9600,
UINT Parity=0,
UNIT ByteSize=8,
UINT StopBits=1);
// GetTimeOuts()函數獲得超時參數
COMMTIMEOUTS GetTimeOuts();
// SetTimeOuts()函數設置超時參數
BOOL SetTimeOuts(
UINT ReadMultiplier=0,
UINT ReadConstant=0,
UINT WriteMultiplier=10,
UINT WriteConstant=1000);
// WritePort()函數實現寫串口操作
void WritePort(HANDLE port,CString);
CString ReadPort(HANDLE port); //讀串口操作
BOOL ClosePort();? //關閉串口
};
下面對該類的重要函數作以說明:
(1)在構造函數CSerialPort()中已對該類的數據成員進行了初始化操作。
(2)初始化串口函數InitPort()函數用于完成串口的初始化工作,包括打開串口、設置DCB參數、設置通信的超時時間等。
打開串口使用CreateFile()函數,其中InitPort()函數中的第一個參數為要打開的串口,通常將該參數賦給CreateFile()函數中的第一個參數;設置DCB參數應調用該類中的SetDCB()函數,并將InitPort()函數中的第2至第5參數賦給SetDCB()函數;設置通信的超時時間應調用該類中的SetTimeOuts()函數,并將InitPort()函數中的第6至第9參數賦給SetTimeOuts()函數。另外,該串口是系統資源,應該根據不同要求對其安全屬性進行設置。
(3)SetDCB()函數用于設置DCB參數,包括傳輸的波特率、是否進行奇偶校驗、每字節長度以及停止位等。
(4)SetTimeOuts()函數用于設定訪問的超時值,根據設置的值可以計算出總的超時間隔。前面兩個參數用來設置讀操作總的超時值,后面兩個參數用來設置寫操作總的超時值。
(5)WritePort()函數用來完成向串口寫數據。由于該系統需要對多個串口進行通信,所以首先應把串口號作為參數傳遞給該函數;接著該函數把按參數傳遞過來的、要發送的數據進行編碼(也就是加入校驗,這樣能減少誤碼率),然后再調用Windows API函數WriteFile()并把數據發送到串口。
(6)ReadPort()函數用來完成從串口讀數據,由于有多個串口,所以應把串口作為參數傳遞進來,然后調用API函數ReadFile(),并把下位機發送到串口,數據讀出來放到緩存里面,接著對數據進行處理以將其變換成字符串(CString)類型并返回。
(7)GetDCB()函數主要用于獲得串口的當前配置,可通過調用API函數GetCommState()來實現,然后再進行相應的處理。
(8)GetTimeOuts()函數用于獲得訪問超時值。
(9)ClosePort()函數可用來關閉串口。因為在Windows系統中串口是系統資源,因而在不用時,應將其釋放掉,以便于其它進程對該資源的使用。
4 基于串口通信的金剛石合成控制
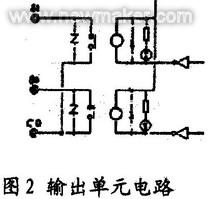
金剛石合成控制系統采用主從式控制方式,上位機為微機、下位機為PLC。上位機的主要功能是對系統進行實時監控,下位機的主要功能是對系統進行實時控制。上位機采用Windows 98操作系統,其監控程序可用VC開發,上、下位機之間通過RS-232與RS-485串口進行通信,它們之間采用的通信波特率為9600bps,無奇偶校驗,每字節8位,并有1位停止位。上、下位機之間傳送的數據格式可自己定義。由于傳輸數據時可能會引起錯誤,所以加入了校驗算法。該系統通過上位機向下位機發送數據,下位機收到后就把當前系統的狀態參數返回給上位機。由于該系統中所控制的參數具有遲滯性,所以應采用定時發送數據的方法來采集現場狀態信息。
上位機編程時,可用VC6.0生成一個對話框類型的程序框架,然后將自己編寫的CSerialPort類加入到該工程中,并在主界面類?CCrystal?中添加一個CSerialPort類的成員變量serial。當監控系統開始工作時,可用AfxBeginThread??函數創建輔助線程來管理串口通信,當調用CSerialPort類中的WritePort? ?函數向串口發送數據后,可調用_sleep? ?函數使輔助線程休眠一段時間,以便使PLC有充分的時間返回數據;接著再調用CSerialPort類中的ReadPort()函數并從串口讀數據,然后再調用_sleep()函數使輔助線程再休眠一定的時間。這樣設計后,當進行串口通信時,主線程就能繼續完成監控功能和處理其他事務。輔助線程函數的主要代碼如下:
UINT SerialPro(void* param)
{
Ccrystal* mdlg=(Ccrystal*)param?
CString str;
int flag=1;
//如果初始化串口失敗返回
if(!InitPort(“com2”))
{AfxMessageBox(“打開串口2失敗”);
return 0;
}
//循環讀寫串口,直到結束
while(flag)
{
//這里把要發送的數據傳送給變量str
……
//向串口寫數據
mdlg->serial.WritePort(hport,str);
//讓輔助線程休眠100ms
_sleep(100);
//從串口讀數據并賦給變量str
str=mdlg->serial.ReadPort(hport);
//這里把從串口得到的數據進行處理
……
5 結束語
運用面向對象方法和多線程技術設計的通用串口通信類CSerialPort類,通過對Windows API函數的封裝使串口通信變得簡單方便、容易維護。目前,該軟件系統已成功地應用于金剛石合成控制系統,并成功解決了RS-232與RS-485兩種串口通信的問題。經過幾個月的運行表明,該串口通信軟件工作穩定,出色地完成了系統的實時監控和顯示任務。此外,由于采用了面向對象的方法和模塊化設計,該軟件的維護和升級十分方便;同時該系統具有很好的移植性,按照不同需求稍微改動一些代碼就可以應用于其它控制系統中。





















 工商網監
工商網監
評論