為了升級(jí)現(xiàn)有電梯控制系統(tǒng),給出了一種以LPC2294 為主控芯片的電梯主控系統(tǒng)的設(shè)計(jì)。軟件上以搶占式多任務(wù)實(shí)時(shí)操作系統(tǒng)μC/OS 為平臺(tái),實(shí)現(xiàn)了電梯主控系統(tǒng)中的輸入采集、調(diào)度分配、CAN 通信、菜單
2013-05-27 09:45:19 5195
5195 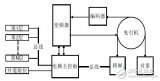
本文介紹了ANT 無(wú)線網(wǎng)絡(luò)協(xié)議的技術(shù)特點(diǎn),基于單片機(jī)和第二代ANT 網(wǎng)絡(luò)芯片nRF24AP2 進(jìn)行了LED 智能照明控制系統(tǒng)的軟硬件設(shè)計(jì),該系統(tǒng)具有低成本、低功耗和安裝靈活等特點(diǎn),可用于家庭、辦公樓和大型場(chǎng)館等室內(nèi)照明,也可以應(yīng)用于交通和景觀等室外照明。
2014-03-21 11:35:271793 屬于現(xiàn)場(chǎng)總線的范疇,它是一種有效支持分布式控制或?qū)崟r(shí)控制的串行通信網(wǎng)絡(luò)。在這個(gè)網(wǎng)絡(luò)中的各種硬件設(shè)備之間不可避免的需要實(shí)現(xiàn)數(shù)據(jù)傳輸,以實(shí)現(xiàn)產(chǎn)品的功用。適應(yīng)技術(shù)具體要求,CAN總線透明傳輸通訊模塊誕生
2011-09-24 11:57:56
、軟硬件進(jìn)行安全性設(shè)計(jì)。 3.2 未來(lái)發(fā)展方向 網(wǎng)絡(luò)化測(cè)控系統(tǒng)的快速發(fā)展必然導(dǎo)致網(wǎng)絡(luò)化測(cè)控實(shí)現(xiàn)技術(shù)的不斷發(fā)展。各項(xiàng)新技術(shù)在網(wǎng)絡(luò)化測(cè)控領(lǐng)域的應(yīng)用大大促進(jìn)了網(wǎng)絡(luò)化測(cè)控的進(jìn)程,方便了系統(tǒng)集成,未來(lái)的網(wǎng)絡(luò)化測(cè)控實(shí)現(xiàn)
2019-04-08 09:42:13
的電機(jī)控制系統(tǒng)擺脫了空間的限制,基于FPGA的網(wǎng)絡(luò)化電機(jī)傳動(dòng)控制通過(guò)網(wǎng)絡(luò)實(shí)現(xiàn)了對(duì)設(shè)備的遠(yuǎn)程控制、管理和維護(hù),同時(shí)亦可實(shí)現(xiàn)資源和技術(shù)的共享。它通過(guò)使FPGA實(shí)現(xiàn)了基于以太網(wǎng)的TCP、IP通信,從而實(shí)時(shí)與遠(yuǎn)程
2012-07-10 17:11:11
ROVER C5 V0501 機(jī)器人控制系統(tǒng)采用國(guó)際流行的開放式軟硬件平臺(tái),配以自主研發(fā)的避障控制卡、牽引運(yùn)動(dòng)卡及機(jī)器人內(nèi)控專用編碼器和安全接口;
2019-09-12 09:00:12
。智能傳感器網(wǎng)絡(luò)化技術(shù)致力于研究智能傳感器的網(wǎng)絡(luò)通信功能,將傳感器技術(shù),通信技術(shù)和計(jì)算機(jī)技術(shù)融合,實(shí)現(xiàn)信息的采集、傳輸和處理真正統(tǒng)一和協(xié)同。本文研制了一種基于片上系統(tǒng)芯片的傳感器模塊軟硬件設(shè)計(jì)。
2019-10-10 08:06:59
現(xiàn)經(jīng)過(guò)測(cè)試的軟件部分將會(huì)正常工作,這會(huì)節(jié)省項(xiàng)目后期的大量時(shí)間及努力。軟硬件聯(lián)合仿真系統(tǒng)由一個(gè)硬件執(zhí)行環(huán)境和一個(gè)軟件執(zhí)行環(huán)境組成,通常軟件環(huán)境和硬件環(huán)境都有自己的除錯(cuò)和控制界面,軟件通過(guò)一系列由處理器啟動(dòng)
2008-07-17 08:56:46
,國(guó)內(nèi)各地鐵項(xiàng)目都在不斷加強(qiáng)監(jiān)控系統(tǒng)的深度集成和互聯(lián),以完成相關(guān)事件的聯(lián)動(dòng),提高自動(dòng)化系統(tǒng)的安全性、可靠性及快速響應(yīng)能力,實(shí)現(xiàn)高性價(jià)比,減少重復(fù)投資和后期維護(hù)成本。也因此,各地鐵綜合監(jiān)控系統(tǒng)的軟硬件
2014-04-25 15:41:54
器應(yīng)用技術(shù)對(duì)于實(shí)現(xiàn)單機(jī)控制到流水線自動(dòng)化,從集中控制系統(tǒng)到分散控制系統(tǒng)都具有十分重要的意義。 [hide]基于CAN總線的網(wǎng)絡(luò)化PLC技術(shù)研究與實(shí)現(xiàn).rar[/hide]
2009-10-31 10:02:11
基于CAN總線的分散型控制系統(tǒng)的設(shè)計(jì)-國(guó)防科學(xué)技術(shù)大學(xué)研究生院本文以CAN總路線分散型控制系統(tǒng)的科研任務(wù)為背景,主要論述了基于CAN總路的分散型控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)。[hide]基于CAN總線的分散型控制系統(tǒng)的設(shè)計(jì).rar[/hide]
2009-10-31 09:51:10
基于CAN總線的電力抄表系統(tǒng)設(shè)計(jì)介紹了一種基于CAN總線的電力抄表方案,設(shè)計(jì)了系統(tǒng)的軟硬件,并詳細(xì)地闡述了其工作原理。該系統(tǒng)利用AT89C52微處理器與多片8259A中斷控制器配合,實(shí)現(xiàn)分布式的電表
2009-12-15 14:46:57
的是RS-485,HART等。CAN總線是一種全數(shù)字化的現(xiàn)場(chǎng)總線,可靠性高,在國(guó)內(nèi)有廣泛的應(yīng)用,將現(xiàn)場(chǎng)總線技術(shù)應(yīng)用到閥門控制系統(tǒng)中不僅使我國(guó)的通用型閥門具有了網(wǎng)絡(luò)通信功能,而且對(duì)我國(guó)閥門電動(dòng)裝置參與國(guó)際競(jìng)爭(zhēng)也具有
2011-03-09 16:03:22
摘要:簡(jiǎn)要介紹了軟硬件協(xié)同仿真技術(shù),指出了在大規(guī)模FPGA開發(fā)中軟硬件協(xié)同仿真的重要性和必要性,給出基于Altera FPGA的門級(jí)軟硬件協(xié)同仿真實(shí)例。 關(guān)鍵詞:系統(tǒng)級(jí)芯片設(shè)計(jì);軟硬件協(xié)同仿真
2019-07-04 06:49:19
通信控制網(wǎng)絡(luò),實(shí)現(xiàn)了全部節(jié)點(diǎn)之間的數(shù)據(jù)共享以及相互之間的協(xié)同工作,并可在不同節(jié)點(diǎn)間實(shí)現(xiàn)高效數(shù)據(jù)傳輸。試驗(yàn)結(jié)果表明總線利用率較高,系統(tǒng)響應(yīng)速度較快。關(guān)鍵詞DSP 高低速CAN總線 汽車控制系統(tǒng)Design
2009-10-06 14:57:04
完成系統(tǒng)的主要邏輯功能;其次,它是可編程系統(tǒng),具有靈活的設(shè)計(jì)方式,可裁剪、可升級(jí)、可擴(kuò)充,并具備軟硬件在系統(tǒng)可編程的功能。由此可見,軟硬件協(xié)同設(shè)計(jì)是電子系統(tǒng)復(fù)雜化后的一種設(shè)計(jì)新趨勢(shì),其中SoPC是這一
2013-01-22 16:41:56
什么是軟硬件協(xié)同設(shè)計(jì)呢?片上可編程系統(tǒng)SoPC是什么?如何去實(shí)現(xiàn)一種基于SoPC的軟硬件協(xié)同設(shè)計(jì)呢?基于SoPC的軟硬件協(xié)同設(shè)計(jì)有何功能呢?
2021-12-24 07:15:15
管理和SOA硬件I/O控制管理,可兼容自動(dòng)駕駛系統(tǒng)的多個(gè)傳感器和外部設(shè)備,支持多異構(gòu)芯片和硬件升級(jí)。操作系統(tǒng)內(nèi)核/服務(wù)中間件:作為文件調(diào)度和驅(qū)動(dòng)的核心,操作系統(tǒng)在支撐軟硬件解耦和軟件在硬件上的部署方面
2022-06-10 17:23:22
本帖最后由 NCSRD 于 2016-4-26 14:30 編輯
本司目前正開發(fā)一款手持式儀器,欲將該儀器的嵌入式
控制系統(tǒng)外包,具有嵌入式
軟硬件開發(fā)項(xiàng)目經(jīng)驗(yàn)的個(gè)人或團(tuán)體均可,有欲者可聯(lián)系我,聯(lián)系方式:dingzhenmin@ncschina.com。由于我們?cè)诒本宰詈檬窃诒本┑呐笥选?/div>
2016-04-26 09:46:53
根據(jù)通用主動(dòng)視覺系統(tǒng)的設(shè)計(jì)要求,提出了基于DSP的嵌入式主動(dòng)視覺系統(tǒng)的設(shè)計(jì)方案,并完成系統(tǒng)的軟硬件設(shè)計(jì)。最終實(shí)現(xiàn)的系統(tǒng)具有俯仰和搖擺2個(gè)自由度、支持雙CCD視覺傳感器和雙傾角傳感器。該系統(tǒng)的硬件分別
2019-08-26 06:40:28
新型車輛模擬駕駛訓(xùn)練系統(tǒng)的組成及工作原理是什么怎么實(shí)現(xiàn)動(dòng)感系統(tǒng)的總體構(gòu)想及其軟硬件設(shè)計(jì)?
2021-05-12 06:15:16
CAN總線的特點(diǎn)是什么?CAN總線在電動(dòng)汽車上的應(yīng)用是什么?怎么實(shí)現(xiàn)基于CAN總線的電動(dòng)汽車控制系統(tǒng)設(shè)計(jì)?
2021-05-17 07:07:31
在現(xiàn)代的工業(yè)控制、車輛運(yùn)動(dòng)和醫(yī)療設(shè)備等系統(tǒng)中,懸掛運(yùn)動(dòng)系統(tǒng)的應(yīng)用越來(lái)越多,在這些系統(tǒng)中懸掛運(yùn)動(dòng)部件通常是具體的執(zhí)行機(jī)構(gòu),因而懸掛部件的運(yùn)動(dòng)精確性是整個(gè)系統(tǒng)工作效能的決定因素,而在實(shí)際中實(shí)現(xiàn)懸掛運(yùn)動(dòng)
2019-08-12 08:21:38
系統(tǒng)(RSoC),提出了一種過(guò)程級(jí)硬件透明編程模型,給出了過(guò)程級(jí)的硬件封裝方案;在分析軟硬件過(guò)程根本區(qū)別的基礎(chǔ)上,針對(duì)硬件過(guò)程開發(fā)了專門的管理模塊,并利用部分動(dòng)態(tài)重構(gòu)等技術(shù),實(shí)現(xiàn)了硬件過(guò)程的動(dòng)態(tài)配置
2010-05-28 13:40:38
傳感器是將各種參量送入計(jì)算機(jī)系統(tǒng),進(jìn)行智能監(jiān)測(cè)、控制的最前端。隨著科技的發(fā)展,數(shù)字化、網(wǎng)絡(luò)化傳感器應(yīng)用日益廣泛,以其傳統(tǒng)方式不可比擬的優(yōu)勢(shì)漸漸成為技術(shù)的趨勢(shì)和主流。下面,我們結(jié)合實(shí)際應(yīng)用中的要求
2019-06-25 07:31:52
閉環(huán)控制系統(tǒng)設(shè)計(jì)及軟硬件實(shí)現(xiàn)</strong><br/></font></p>&
2009-12-18 11:02:54
控制器局域網(wǎng)(CAN)是現(xiàn)代汽車網(wǎng)絡(luò)通信與控制系統(tǒng)中的重要組成部分,《汽車CAN總線系統(tǒng)原理、設(shè)計(jì)與應(yīng)用》全面、系統(tǒng)地介紹了汽車CAN總線的基本原理、應(yīng)用層協(xié)議制定、系統(tǒng)軟件和硬件設(shè)計(jì),并且通過(guò)實(shí)例
2018-04-09 22:27:02
。文章介紹了符合CAN2.0B協(xié)議汽車CAN系統(tǒng)設(shè)計(jì)方案,著重討論了以微處理器P89C668為核心的CAN總線智能節(jié)點(diǎn)的軟硬件實(shí)現(xiàn),推薦一款MOTOROLA的多路開關(guān)檢測(cè)芯片MC33993,并且涉及到
2015-08-18 14:10:28
控制系統(tǒng)(FCS) 進(jìn)而自動(dòng)控制系統(tǒng)的設(shè)計(jì)方法和安裝調(diào)試方式也將發(fā)生重大的變化現(xiàn)行的現(xiàn)場(chǎng)設(shè)備和儀表的產(chǎn)品結(jié)構(gòu)將發(fā)生重大變革現(xiàn)場(chǎng)總線把自動(dòng)控制系統(tǒng)和設(shè)備帶進(jìn)了信息網(wǎng)絡(luò)之中形成為企業(yè)信息網(wǎng)絡(luò)的底層 從而為實(shí)現(xiàn)企業(yè)信息集成和企業(yè)綜合自動(dòng)化提供了可行的基礎(chǔ).
2009-11-17 09:42:36
什么是移動(dòng)機(jī)器人軟硬件系統(tǒng)問(wèn)題?移動(dòng)機(jī)器人軟硬件系統(tǒng)有哪些問(wèn)題呢?
2021-11-11 06:07:42
基于MCU和nRF24L01的網(wǎng)絡(luò)化無(wú)線通信系統(tǒng)的硬件設(shè)計(jì)基于MCU和nRF24L01的網(wǎng)絡(luò)化無(wú)線通信系統(tǒng)的軟件設(shè)計(jì)
2021-05-20 07:13:45
)基本都不支持網(wǎng)絡(luò),也不能簡(jiǎn)單升級(jí)具有網(wǎng)絡(luò)功能,且模式較為單一。因而,設(shè)計(jì)與實(shí)現(xiàn)了一種網(wǎng)絡(luò)化通用測(cè)控系統(tǒng)平臺(tái),以實(shí)現(xiàn)網(wǎng)絡(luò)化測(cè)控需求且具有一般平臺(tái)的通用性能。本文主要介紹了ARM嵌入式系統(tǒng)與ZigBee無(wú)線技術(shù)相結(jié)合的通用網(wǎng)絡(luò)測(cè)控平臺(tái)的硬件設(shè)計(jì)。
2019-11-08 07:45:34
CRT工業(yè)運(yùn)動(dòng)控制系統(tǒng),其硬件結(jié)構(gòu)基于高性能 DSP 為控制核心、FPGA 協(xié)處理,插補(bǔ)算法、脈沖信號(hào)產(chǎn)生及直線曲線加減速控制、I/O 信號(hào)的檢測(cè)處理。DMC600M系列3~6軸運(yùn)動(dòng)控制系統(tǒng)
2022-02-26 16:26:24
針對(duì)目前紡織測(cè)試儀器的信息化程度低和儀器儀表模塊化、網(wǎng)絡(luò)化的發(fā)展趨勢(shì),研究了基于CAN總線的紡織測(cè)試儀器網(wǎng)絡(luò)化系統(tǒng),給出了系統(tǒng)的硬件設(shè)計(jì)和軟件設(shè)計(jì)方案。該系統(tǒng)具有
2009-03-17 10:36:38 15
15 文章介紹了一種基于CAN 總線的煤礦瓦斯報(bào)警節(jié)點(diǎn)系統(tǒng)的設(shè)計(jì),給出了基于CAN 總線的智能監(jiān)控節(jié)點(diǎn)網(wǎng)絡(luò)的一般結(jié)構(gòu),著重介紹了節(jié)點(diǎn)系統(tǒng)的軟硬件設(shè)計(jì)。關(guān)鍵詞:煤礦; 瓦斯傳感器;
2009-03-30 16:40:4647 介紹紡織工程中清紗機(jī)控制系統(tǒng)的主要硬件結(jié)構(gòu)和設(shè)計(jì)方法。系統(tǒng)以具有CAN現(xiàn)場(chǎng)總線接口的87C598單片機(jī)為核心,構(gòu)成前端控制器并組成工業(yè)局域網(wǎng),實(shí)現(xiàn)對(duì)清紗工程的智能控制。文
2009-05-13 16:27:1510 CAN 總線作為一種現(xiàn)場(chǎng)總線,應(yīng)用極為普及。本文給出了一種基于AT89C51 和SJA1000 的CAN 總線節(jié)點(diǎn)設(shè)計(jì)方法,并對(duì)軟硬件進(jìn)行了相應(yīng)的說(shuō)明。關(guān)鍵詞:CAN 總線,SJA1000,單片機(jī)CAN(C
2009-05-25 13:26:1259 本文介紹了一種應(yīng)用于并聯(lián)液壓混合動(dòng)力車的控制系統(tǒng)。該控制系統(tǒng)采用基于CAN 總線的分布式控制系統(tǒng)體系結(jié)構(gòu),確定了網(wǎng)絡(luò)協(xié)議,并設(shè)計(jì)了控制系統(tǒng)的硬件平臺(tái)和控制軟件,最后
2009-05-25 14:37:2420 基于CAN 總線通訊的變槳距風(fēng)力發(fā)電控制系統(tǒng):變槳距控制器用于實(shí)現(xiàn)功率調(diào)節(jié)和槳角控制,介紹了液壓驅(qū)動(dòng)和電控驅(qū)動(dòng)兩種槳距控制系統(tǒng)的不同,然后討論了CAN 總線在風(fēng)力發(fā)電機(jī)組
2009-05-31 12:52:4832 介紹了某型號(hào)導(dǎo)彈系統(tǒng)CAN 測(cè)控網(wǎng)絡(luò)體系的構(gòu)成,闡明了測(cè)控PC 機(jī)和現(xiàn)場(chǎng)設(shè)備與CAN 總線的軟硬件接口設(shè)計(jì),簡(jiǎn)述了該型導(dǎo)彈系統(tǒng)測(cè)控程序的實(shí)現(xiàn).關(guān)鍵詞:CAN; 導(dǎo)彈; 測(cè)控系統(tǒng)
2009-06-04 08:53:2123 分析了傳統(tǒng)的串行通信和集中式控制的缺點(diǎn),提出將CAN 總線技術(shù)應(yīng)用于分布式三維步進(jìn)電機(jī)控制系統(tǒng),給出了分布式控制網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu)和網(wǎng)絡(luò)物理層、數(shù)據(jù)鏈路層的實(shí)現(xiàn)方法,
2009-06-06 13:43:1223 本文介紹了CAN 總線在烤煙控制系統(tǒng)的應(yīng)用與實(shí)現(xiàn),對(duì)CAN 總線接口的硬件電路及程序進(jìn)行了詳細(xì)的分析,并簡(jiǎn)要介紹了監(jiān)控軟件的功能與開發(fā)。關(guān)鍵詞:烤煙;CAN 總線;SJA1000
2009-06-10 13:31:3212 為提高空調(diào)系統(tǒng)的可靠性和乘客舒適性,引入了CAN 總線來(lái)組成客車空調(diào)控制系統(tǒng),本文詳細(xì)介紹了該系統(tǒng)的硬件、軟件設(shè)計(jì)及實(shí)現(xiàn)方法,同時(shí)對(duì)CAN 總線的特點(diǎn)也做了介紹。關(guān)鍵詞
2009-07-27 15:33:2921 以校園學(xué)生宿舍負(fù)荷監(jiān)控系統(tǒng)的設(shè)計(jì)為例,介紹了基于CAN 總線的負(fù)荷監(jiān)控系統(tǒng)的原理、網(wǎng)絡(luò)組成,并對(duì)網(wǎng)絡(luò)智能節(jié)點(diǎn)的軟硬件設(shè)計(jì)進(jìn)行了詳細(xì)的闡述,只要稍加改動(dòng)還可應(yīng)用到其
2009-07-30 10:18:0915 介紹了一種基于DSP 的逆變電源控制系統(tǒng),詳細(xì)闡述了系統(tǒng)組成結(jié)構(gòu)和軟硬件設(shè)計(jì)。該系統(tǒng)采用TMS320F2812 作為主控制器,最大程度的減少了硬件電路的搭建,實(shí)現(xiàn)了對(duì)逆變電源的數(shù)
2009-07-30 10:23:5834 近年來(lái)網(wǎng)絡(luò)技術(shù)的快速發(fā)展為高級(jí)控制提供了廣闊的應(yīng)用前景。網(wǎng)絡(luò)化控制系統(tǒng)受到了廣泛的關(guān)注。本文基于本課題組開發(fā)的網(wǎng)絡(luò)化控制系統(tǒng),提出了一種自適應(yīng)控制方案。實(shí)驗(yàn)
2009-07-30 14:36:5713 在網(wǎng)絡(luò)化控制系統(tǒng)中,由于傳感器和執(zhí)行器分布很廣而且數(shù)據(jù)包容量有限,多包傳輸不可避免。多包傳輸影響網(wǎng)絡(luò)化控制系統(tǒng)的穩(wěn)定性,甚至引起系統(tǒng)失穩(wěn)。研究了傳感器采用時(shí)
2009-07-30 16:22:0010 介紹了一種基于ARM9 的嵌入式車載網(wǎng)關(guān)的軟硬件系統(tǒng)設(shè)計(jì),簡(jiǎn)要闡述了車載LIN 網(wǎng)絡(luò),CAN 網(wǎng)絡(luò)與互聯(lián)網(wǎng)通過(guò)該網(wǎng)關(guān)的連接方案,詳細(xì)介紹了基于AMR9 和Linux 環(huán)境下的LIN協(xié)議編程、CAN
2009-08-03 11:58:1723 本文提出了一種基于CAN總線的分布式停車場(chǎng)燈光智能控制系統(tǒng)的設(shè)計(jì)方案,介紹了該智能控制系統(tǒng)的軟件、硬件設(shè)計(jì)方法。該系統(tǒng)具有結(jié)構(gòu)簡(jiǎn)單、高可靠性、高性能價(jià)格比等特點(diǎn),
2009-08-05 10:53:4823 本文首先分析了國(guó)際上幾種主要的液壓支架電液控制系統(tǒng)的通訊實(shí)現(xiàn)方法,指出原有方法中存在的不足。采用了CAN 總線實(shí)現(xiàn)綜采面支架控制器的互連。針對(duì)煤礦對(duì)現(xiàn)場(chǎng)總線本質(zhì)安
2009-08-11 10:40:0713 本文探討了一種用于工業(yè)測(cè)控系統(tǒng)的單片機(jī)軟硬件綜合設(shè)計(jì)方法——軟硬件平臺(tái)技術(shù),重點(diǎn)闡述了其基本原理、設(shè)計(jì)思想、實(shí)現(xiàn)方法,并給出了一個(gè)單片機(jī)測(cè)控系統(tǒng)軟硬件開發(fā)平臺(tái)
2009-08-13 09:38:3612 針對(duì)CAN 總線技術(shù)應(yīng)用的蓬勃發(fā)展,本文設(shè)計(jì)了一種基于CAN 總線的工程設(shè)備控制系統(tǒng),對(duì)總線通訊協(xié)議進(jìn)行了設(shè)計(jì)研究,介紹了基于CAN 總線技術(shù)的作業(yè)控制終端、作業(yè)控制器、虛擬
2009-09-03 10:14:0216 CAN控制器模塊世界向著網(wǎng)絡(luò)化方向發(fā)展,測(cè)控系統(tǒng)也不例外。CAN總線的出現(xiàn),使控制系統(tǒng)的網(wǎng)絡(luò)化成為可能,是國(guó)際公認(rèn)的一種現(xiàn)場(chǎng)總線協(xié)議。CAN (Controller Area Network)總
2009-09-21 08:39:1512 針對(duì)紡織生產(chǎn)過(guò)程中清紗機(jī)的工作特點(diǎn),提出了一種基于CAN總線技術(shù)的控制系統(tǒng)設(shè)計(jì)方法,分析了系統(tǒng)的工作原理、網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)及其硬件構(gòu)成,詳細(xì)闡述了CAN總線的網(wǎng)絡(luò)接口方法
2009-11-01 09:33:1413 串級(jí)控制系統(tǒng)中,控制回路是通過(guò)實(shí)時(shí)網(wǎng)絡(luò)閉合的,稱為網(wǎng)絡(luò)化串級(jí)控制系統(tǒng)。針對(duì)基于現(xiàn)場(chǎng)總線的一類網(wǎng)絡(luò)化串級(jí)控制系統(tǒng),主控制器和副控制器都采用了動(dòng)態(tài)輸出反饋,在網(wǎng)
2009-12-18 17:10:4120 介紹了采用CAN總線技術(shù)改造電極箔生產(chǎn)控制系統(tǒng)中,CAN總線系統(tǒng)的智能控制組件設(shè)計(jì)、CAN智能適配卡設(shè)計(jì)、模擬信號(hào)采集和執(zhí)行機(jī)構(gòu)的選用原則。
2009-12-24 11:32:5929 分析了地鐵雜散電流的形成及危害, 闡述了地鐵雜散電流監(jiān)測(cè)控制系統(tǒng)的功能,設(shè)計(jì)了基于CAN 總線的地鐵雜散電流的監(jiān)測(cè)系統(tǒng)。論文對(duì)該系統(tǒng)的下位機(jī)軟硬件結(jié)構(gòu),PC-CAN接口卡以及
2010-01-20 15:29:5421 網(wǎng)絡(luò)化控制系統(tǒng)NCSs(Networked Control Systems)是基于網(wǎng)絡(luò)的分布式控制系統(tǒng),具有強(qiáng)實(shí)時(shí)性。本文分析了網(wǎng)絡(luò)控制系統(tǒng)的特點(diǎn),網(wǎng)絡(luò)時(shí)延與控制系統(tǒng)性能間的關(guān)系,分類介紹了當(dāng)前網(wǎng)絡(luò)化
2010-07-21 09:19:2213 對(duì)于瀝青混凝土攤鋪機(jī)自動(dòng)找平控制系統(tǒng)來(lái)說(shuō),數(shù)字式控制系統(tǒng)的研制是目前的一個(gè)方向。介紹了一種基于CAN總線的數(shù)字式自動(dòng)找平控制系統(tǒng)。該系統(tǒng)以CAN總線作為通信方式,PWM控
2010-12-07 14:17:2233 網(wǎng)絡(luò)化電機(jī)控制系統(tǒng)設(shè)
2011-01-10 11:03:3644 本文提出了一套電控自動(dòng)離合器的控制器方案, 并進(jìn)行了系統(tǒng)的軟硬件開發(fā), 初步實(shí)現(xiàn)了自動(dòng)離合器的基本功能, 設(shè)計(jì)了CAN 總線接口。
2011-03-31 11:23:192288 
為引入CAN總線技術(shù)以實(shí)現(xiàn)運(yùn)動(dòng)控制系統(tǒng)的網(wǎng)絡(luò)化,提出了基于LPC2294的CAN總線主節(jié)點(diǎn)的硬件及軟件設(shè)計(jì)方案。硬件采用基于ARM7內(nèi)核的微控制器LPC2294,使用CTM1050T作為CAN收發(fā)器,設(shè)計(jì)了帶
2011-06-21 15:17:1261 以農(nóng)業(yè)溫室為背景,從低成本、高品質(zhì)、易推廣的角度出發(fā),設(shè)計(jì)了一種基于分布式 現(xiàn)場(chǎng)總線 的溫室環(huán)境控制系統(tǒng),并就其軟硬件設(shè)計(jì)作了較詳細(xì)的分析。所設(shè)計(jì)的以CAN 總線為通信平臺(tái)的
2011-07-06 17:06:0436 簡(jiǎn)述了基于CAN總線分布式控制系統(tǒng)的結(jié)構(gòu),并介紹了組態(tài)軟件在現(xiàn)場(chǎng)總線控制系統(tǒng)中的作用,給出了組態(tài)王6.51組態(tài)軟件開發(fā)監(jiān)控程序的一般方法,重點(diǎn)分析了組態(tài)軟件在基于CAN總線的
2011-09-09 12:02:2027 本文給出一種基于CAN總線的車燈控制系統(tǒng)設(shè)計(jì)方案,介紹了車燈控制系統(tǒng)的硬件設(shè)計(jì)和軟件設(shè)計(jì),對(duì)系統(tǒng)的整體結(jié)構(gòu)、硬件配置、軟件功能分別作了詳細(xì)說(shuō)明。
2012-08-20 11:41:3913627 
運(yùn)用低功耗C0rtex-M3微控制器STM32F103VBT6和FPGA芯片設(shè)計(jì)一種基于CAN總線的運(yùn)動(dòng)控制器。介紹系統(tǒng)的體系結(jié)構(gòu)、主要硬件設(shè)計(jì)和軟件結(jié)構(gòu)。利用FPGA高速處理能力實(shí)現(xiàn)控制算法,與外界通信采
2013-01-31 14:33:3945 基于CAN總線的音樂(lè)噴泉控制系統(tǒng)_程道文
2017-03-19 11:33:1110 ,不利于硬件的開發(fā)進(jìn)度。面對(duì)這一難題,文章從FPGA 的軟硬件協(xié)同測(cè)試角度出發(fā),利用PC 機(jī)和測(cè)試硬件設(shè)備的特點(diǎn),進(jìn)行FPGA 的軟硬件協(xié)同測(cè)試的設(shè)計(jì),努力實(shí)現(xiàn)FPGA 的軟硬件協(xié)調(diào)測(cè)試系統(tǒng)在軟硬件的測(cè)試和分析中的應(yīng)用。
2017-11-18 05:46:281616 介紹了一種基于DSP的逆變電源控制系統(tǒng),詳細(xì)闡述了系統(tǒng)組成結(jié)構(gòu)和軟硬件設(shè)計(jì)。該系統(tǒng)采用TMS320F2812作為主控制器,最大程度的減少了硬件電路的搭建,實(shí)現(xiàn)了對(duì)逆變電源的數(shù)字控制。實(shí)驗(yàn)結(jié)果證明
2018-04-09 09:07:257 汽車控制功能的網(wǎng)絡(luò)化、智能化已經(jīng)成為現(xiàn)代汽車工業(yè)發(fā)展的必然趨勢(shì),由于 CAN 總線通訊協(xié)議廢除了傳統(tǒng)的站地址編碼,使得 CAN 網(wǎng)絡(luò)內(nèi)的節(jié)點(diǎn)數(shù)量將不受限制,且實(shí)時(shí)性好,通訊速率高,因此被廣泛用于汽車電子控制系統(tǒng)上。
2018-05-07 09:57:4312507 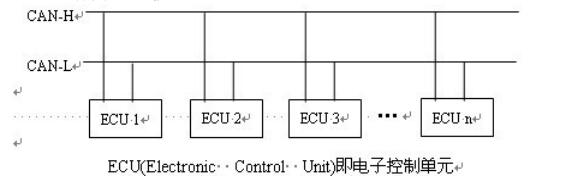
CAN(controller area network)控制器局域網(wǎng)絡(luò)是一種實(shí)時(shí)性強(qiáng)、靈活性好、標(biāo)準(zhǔn)化程度高的串行數(shù)據(jù)總線,廣泛應(yīng)用于汽車電子、工業(yè)自動(dòng)化、船舶、醫(yī)療設(shè)備、工業(yè)設(shè)備等領(lǐng)域。其測(cè)試設(shè)備
2018-11-15 08:02:003180 
基于CAN總線的主要特點(diǎn)及發(fā)展趨勢(shì),我校電液實(shí)驗(yàn)室開放式電液伺服控制系統(tǒng)的改造中采用CAN總線作為現(xiàn)場(chǎng)總線標(biāo)準(zhǔn),構(gòu)建了一套基于CAN總線智能節(jié)點(diǎn)的現(xiàn)場(chǎng)總線控制系統(tǒng)。文中將詳細(xì)介紹智能數(shù)據(jù)采集模塊
2019-10-31 07:51:002834 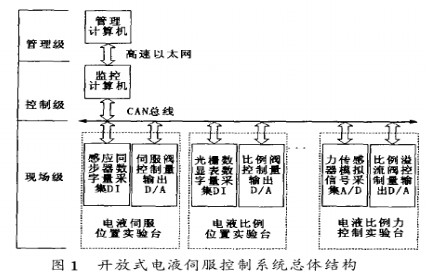
本文說(shuō)的CAN即是一種總線,也是一種協(xié)議。因此,我們常聽見CAN總線,也常聽見CAN協(xié)議。CAN協(xié)議和CANOpen協(xié)議是兩套不同的協(xié)議。從軟硬件層次來(lái)劃分,CAN協(xié)議屬于硬件協(xié)議,而CANOpen
2018-10-03 19:53:0073332 
21世紀(jì)的控制系統(tǒng)將是網(wǎng)絡(luò)與控制的結(jié)合。網(wǎng)絡(luò)化控制系統(tǒng)(NCS)的研究已成為自動(dòng)化領(lǐng)域的前沿課題之一。
2020-02-27 14:27:202319 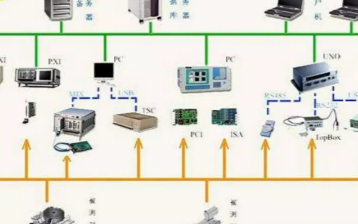
由于CAN 總線具有通訊速率高、實(shí)時(shí)性好、帶負(fù)載能力強(qiáng)、可靠性及抗干擾能力好、總線利用率高及硬件成本低等優(yōu)點(diǎn),非常適于大型測(cè)試系統(tǒng)控制網(wǎng)絡(luò)的通訊。因此,本文將基于CAN 總線分布式網(wǎng)絡(luò)控制技術(shù),介紹多視覺傳感器的實(shí)時(shí)控制方法與控制系統(tǒng)的設(shè)計(jì)。
2020-04-04 10:21:001462 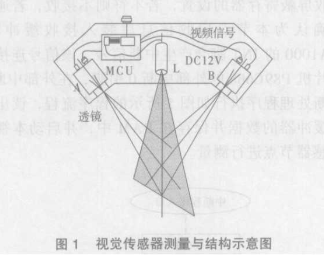
為保證磁導(dǎo)航AGV控制系統(tǒng)的可擴(kuò)性與穩(wěn)定性,提出一種基于CAN總線的控制系統(tǒng),其硬件架構(gòu)以嵌入式工控機(jī)為核心,通過(guò)CAN總線掛接多個(gè)控制外圍設(shè)備的ARM處理器。重點(diǎn)給出了系統(tǒng)運(yùn)動(dòng)控制器與監(jiān)控管理系統(tǒng)
2020-10-26 17:08:1739 CAN(Controller Area Network)總線屬于現(xiàn)場(chǎng)總線的范疇,是一種有效支持分布式控制或?qū)崟r(shí)控制的串行通信網(wǎng)絡(luò)。CAN協(xié)議目前已納入ISO國(guó)際標(biāo)準(zhǔn)(ISO11898),它分為物理層
2021-05-20 10:37:163818 
軟件和硬件需要定義好交互的“接口”,通過(guò)接口實(shí)現(xiàn)軟硬件的“解耦”。例如,對(duì)CPU來(lái)說(shuō),軟硬件的接口是指令集架構(gòu)ISA:ISA之下的CPU處理器是硬件,指令集之上的各種程序、數(shù)據(jù)集、文件等是軟件。
2022-12-07 14:23:151852 電子發(fā)燒友網(wǎng)站提供《基于軟件模擬的SPI端口CAN控制卡的軟硬件設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-13 11:38:270 電子發(fā)燒友網(wǎng)站提供《一種基于CAN總線的單片機(jī)機(jī)床運(yùn)動(dòng)控制系統(tǒng)研究.pdf》資料免費(fèi)下載
2023-10-18 11:16:000  電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論