 電子發燒友App
電子發燒友App


iic通信協議是什么
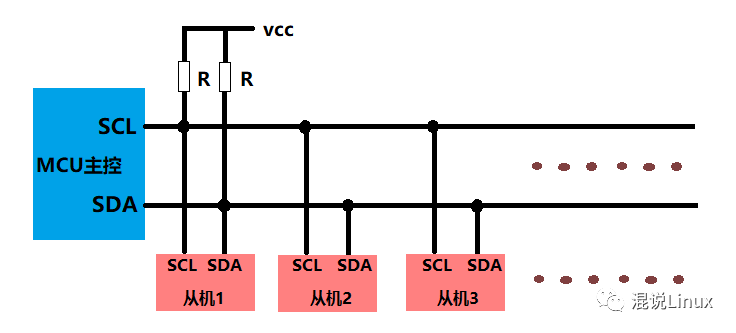
IIC協議是二線制,信號線包含SDA和SCL,且信號線是雙向的,開路結構,需要通過上拉電阻到VCC,具體的電阻值影響的是信號反應速度和驅動能力。
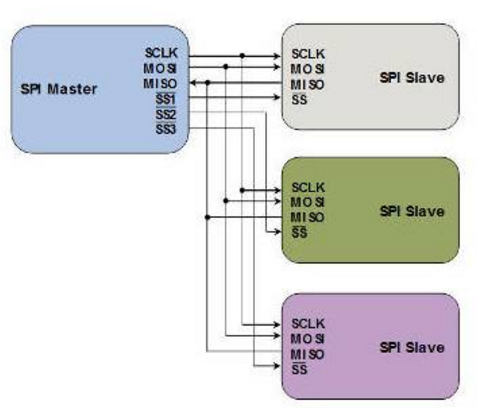
首先,IIC通信與UART,還有SPI統稱為串行接口通信,不過它們之間還是有區別的,如UART的負電平邏輯,還有UART通信不需要時鐘,只需要特定的波特率即可,SPI與IIC都可以有一個主機,多個從機的情況,不過IIC適用于短距離傳輸,如片間通信,攝像頭的配置等場景。
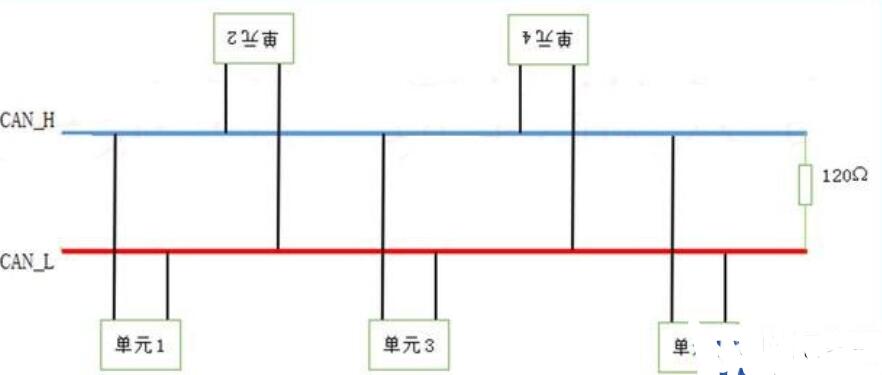
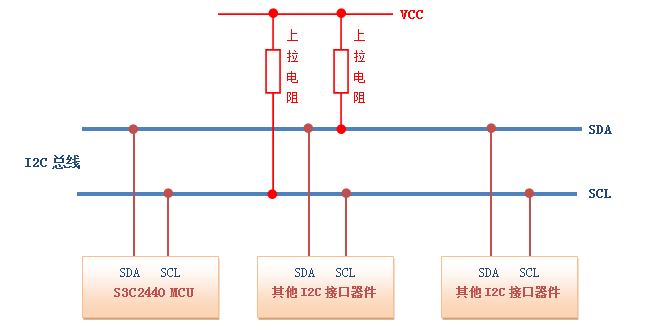
要搞定IIC首先來看IIC的硬件接口:
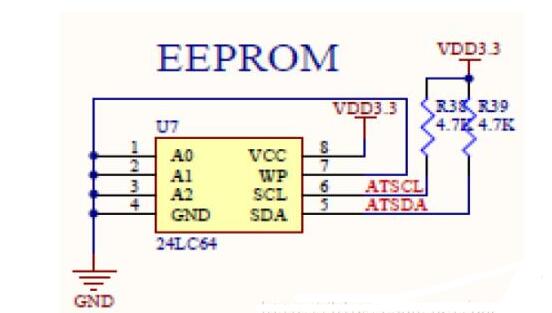
如圖所示,我們知道IIC一個主機可以懸掛多個從機,所以地址線A2,A1,A0 可以實行片選的功能,那么WP這個引腳的功能就是當WP懸空或者接地的時候,表示這時的EEPROM既可以讀,也可以寫,當WP接電源時,則只可以讀而不能寫。
SCL與SDL這兩個引腳,必須上拉,否則驅動能力不夠,無法進行正常的IIC通信。
OK,硬件接口已經介紹清楚了,那么我們現在開始來看協議了。
首先IIC分為字節讀寫和頁面讀寫,首先來看字節讀寫的協議:
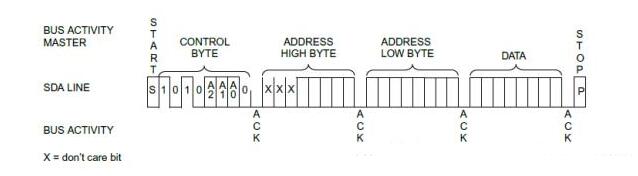
如上圖所示,如果我們要向EEPROM中寫入一個字節的數據,得有如下幾個步驟:
1.開始信號——在SCLK的高電平器件,拉低SDA的信號(由1 變為0)。
2.控制字節——即器件地址,就是你操作那一塊EEPROM。
3.ACK信號——由從機發出,主機為接收,所以在此階段,sda_link必須置為0,即為讀取這個應答信號,所以在SCLK的高點平期間。
4.字節地址——即某一塊EEPROM里面的哪一個地址。
5.ACK信號——與上述相同。
6.數據信號——即你往某個地址里面寫入的8位數據。
7.ACK信號——上述相同。
8.結束信號——在SCLK的高電平期間,拉高SDA信號,表示通信結束。
再來看讀的時序:
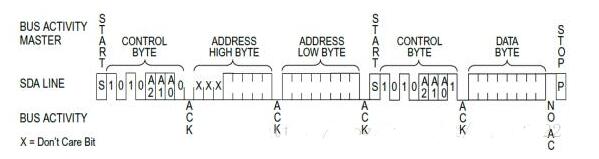
由上圖可看出讀時序的前面處理方式與寫相同,不同的時在第三個ACK信號來了之后,如果是讀,那么會又有一個起始信號,緊接著讀器件地址,然后應答,再然后讀數據,再然后在SCLK的低電平期間發送一個NO ACK信號,要記住這個信號由主機發出,然后緊接著一個結束信號。
由上述讀寫時序我們可知,通信的起始均在SCLK的高電平期間發生跳變,這就據定了我們其他信號跳變均在SCLK的下降沿,SCLK高電平期間數據穩定,適用于讀(即低電平改變數據,高電平采集數據)。
具體過程如下:
首先板子上電來個初始化需要來個延時,具體多少用計數器自己搞定。
代碼如下:
reg [6:0] hadware_initial_delay;
wire hadware_initial_delay_done;
always@(posedge clk or negedge rst_n)
if(!rst_n)
hadware_initial_delay《=7’d0;
else
if(hadware_initial_delay《=7’d49)
hadware_initial_delay《=hadware_initial_delay+1;else
hadware_initial_delay《=hadware_initial_delay;assign hadware_initial_delay_done=(hadware_initial_delay==7’d50)?1’b1:1’b0;OK,我們要知道IIC的速率一般就幾百KH而我們的系統時鐘為50M,所以需要分頻:
代碼如下:
reg [8:0] sclk_cnt;
always@(posedge clk or negedge rst_n)
if(!rst_n)
sclk_cnt《=9’d0;
else
if(hadware_initial_delay_done)
begin
if(sclk_cnt《9’d499)
sclk_cnt《=sclk_cnt+1;
else
sclk_cnt《=0;
end
assign sclk=(sclk_cnt《=9’d249)?1’b1:1’b0;OK,我們知道SCLK高電平期間采集數據,低電平期間改變數據,那么當然,這個“期間”肯定時時鐘沿中間最好啦,畢竟更容易滿足建立時間與保持時間,很穩定的。
具體代碼如下:
wire sclk_posedge_middle=(sclk_cnt==9’d124)?1’b1:1’b0;wire sclk_negedge_middle=(sclk_cnt==9’d374)?1’b1:1’b0;OK,讀寫定義了那么多個過程,當然需要狀態機來搞定啦,定義變量如下:
parameter IDLE = 4’d0 ;
parameter START1 = 4’d1 ;
parameter ADD1 = 4’d2 ;
parameter ACK1 = 4’d3 ;
parameter ADD2 = 4’d4 ;
parameter ACK2 = 4’d5 ;
parameter DATA = 4’d6 ;
parameter ACK3 = 4’d7 ;
parameter STOP1 = 4’d8 ;
parameter START2 = 4’d9 ;
parameter ADD3 = 4’d10;
parameter ACK4 = 4’d11;
parameter DATA_READ = 4’d12;
parameter NO_ACK = 4’d13;
parameter STOP2 = 4’d14;
OK,再來個宏定義,假設寫入是這幾個地址,這幾個數據。
define DEVICE_READ 8‘b1010_0001
define DEVICE_WRITE 8’b1010_0000
define WRITE_DATA 8’b0001_0001
define BYTE_ADDR 8’b0000_0011
SDA雙向端口,這個記住,一般這樣搞;
reg sda_link;
reg sda_out_r;
assign sda=sda_link?sda_out_r:1’bz;
當作為輸出時,對吧,使sda_link拉高,作為輸入時,輸入高阻。
各過程如下:
reg [3:0] current_state;
//reg [3:0] next_state;
reg [7:0] db_r;
reg [3:0] num;
reg [7:0] data_out_reg;
always@(posedge clk or negedge rst_n)
if(!rst_n)
begin
sda_link《=0;
db_r《=0;
num《=0;
current_state《=IDLE;
sda_out_r《=0;
data_out_reg《=8’b0;
end
else
begin
case(current_state)
IDLE:begin
sda_out_r《=1;
sda_link《=1;
if(!sw1_r||!sw2_r)
current_state《=START1;
else
current_state《=IDLE;
end
START1:if(sclk_posedge_middle)
begin
sda_out_r《=0;
db_r《=`DEVICE_WRITE;
current_state《=ADD1;
end
else
current_state《=START1;
ADD1 :
if(sclk_negedge_middle)
begin
if(num==4‘d8)
begin
sda_link《=0;
num《=0;
current_state《=ACK1;
sda_out_r《=1;
end
else
begin
current_state《=ADD1;
sda_out_r《=db_r[7-num];
num《=num+1;
end
end
else
current_state《=ADD1;
ACK1:
if(sclk_posedge_middle)
// begin
// if(!sda)
// begin
begin // */current_state《=ADD2;
db_r《=`BYTE_ADDR;
end
else
current_state《=ACK1;
ADD2:begin
sda_link《=1;
if(sclk_negedge_middle)begin
if(num==4’d8)
begin
sda_link《=0;
current_state《=ACK2;
num《=4‘d0;
sda_out_r《=1;
end
else
begin
num《=num+1;
current_state《=ADD2;
sda_out_r《=db_r[7-num];
end
end
else
current_state《=ADD2;
end
ACK2:
if(sclk_posedge_middle)
////begin
//if(!sda)
begin
begin
if(!sw1_r)
begin
db_r《=`WRITE_DATA;
current_state《=DATA;
end
else
if(!sw2_r)
begin
current_state《=START2;
sda_out_r《=1;
end
end
else
current_state《=ACK2;
DATA: begin
sda_link《=1;
if(sclk_negedge_middle)
begin
if(num==4’d8)
begin
num《=4‘d0;
current_state《=ACK3;
sda_out_r《=1;
sda_link《=0;
end
else
begin
num《=num+1;
current_state《=DATA;
sda_out_r《=db_r[7-num];
end
end
else
current_state《=DATA;
end
ACK3: if(sclk_posedge_middle)
// begin
// if(!sda)
current_state《=STOP1;
// end
STOP1:
begin
sda_link《=1;
sda_out_r《=0;
if(sclk_posedge_middle)
begin
sda_out_r《=1;
if(sw1_r)
// 你要是不等它松開才恢復初始狀態,那么你一旦恢復初始狀態SW1_r就為低電平,他又開始寫了,所以為了避免重復寫入數據。
current_state《=IDLE;
else
current_state《=STOP1;
end
else
current_state《=STOP1;
end
START2:begin
sda_link《=1;
if(sclk_posedge_middle)
begin
sda_out_r《=0;
sda_link《=1;
db_r《=`DEVICE_READ;
current_state《=ADD3 ;
end
end
ADD3: begin
if(sclk_negedge_middle)
begin
if(num==4’d8)
begin
num《=0;
sda_link《=0;
sda_out_r《=1;
current_state《=ACK4;
end
else
begin
num《=num+1;
sda_out_r《=db_r[7-num];
current_state《=ADD3;
end
end
else
current_state《=ADD3;
end
ACK4:
if(sclk_posedge_middle)
// begin
// if(!sda)
current_state《=DATA_READ;
else
current_state《=ACK4;
// end
DATA_READ:
begin
sda_link《=0;
if(sclk_posedge_middle)
begin
if(num==4‘d8)
begin
sda_link《=1;
sda_out_r《=1;
current_state《=NO_ACK;
num《=4’d0;
end
else
begin
num《=num+1;
current_state《=DATA_READ;
data_out_reg[7-num]《=sda;
end
end
end
NO_ACK:
if(sclk_negedge_middle)
begin
sda_out_r《=1;
current_state《=STOP2;
end
else
current_state《=NO_ACK;
STOP2:begin
sda_out_r《=0;
sda_link《=1;
if(sclk_posedge_middle)
begin
sda_out_r《=1;
current_state《=IDLE;
end
else
current_state《=STOP2;
end
default:current_state《=IDLE;
endcase
end
assign data_out=data_out_reg;
endmodule
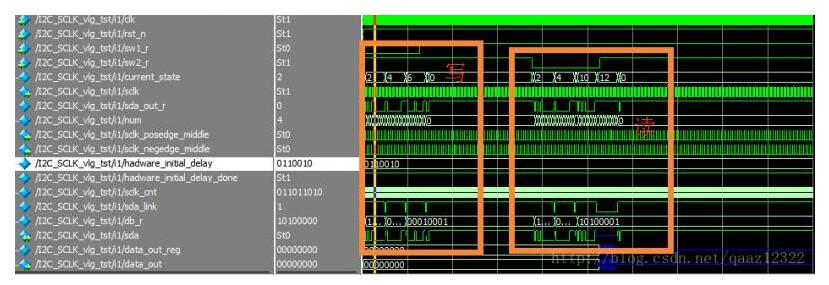
仿真結果如下:












 工商網監
工商網監
評論