本教程是關(guān)于2個(gè)esp8266 WiFi模塊之間的相互通信。我將解釋方法和代碼兩個(gè)esp8266模塊之間的相互通信。我正在做一個(gè)很酷的嵌入式項(xiàng)目需要在兩個(gè)電機(jī)之間進(jìn)行無線通信,這兩個(gè)電機(jī)將一個(gè)部件
2023-09-25 08:29:17
微型飛行器,推出的輕量化,僅由頭文件信息編碼而成的軟件通信協(xié)議庫(kù)。MAVLink遵循一種混合發(fā)布和點(diǎn)對(duì)點(diǎn)設(shè)計(jì)模式:主要的信息可以作為主數(shù)據(jù)流向多個(gè)目標(biāo)目標(biāo)進(jìn)行發(fā)送,而一些子協(xié)...
2021-08-20 06:05:54
WIFI攝像頭模塊 MODULE_29X23MM 300mA 3.3~24V
2023-03-28 13:06:38
Mission Planner二次開發(fā):基于MP地面站源碼,進(jìn)行功能刪減、增加等;深度定制化地面站:基于MP地面站進(jìn)行UI全新設(shè)計(jì),功能增減,企業(yè)Logo定制;基于Mavlink協(xié)議地面站定制開發(fā)
2018-06-19 15:52:02
Mission Planner二次開發(fā):基于MP地面站源碼,進(jìn)行功能刪減、增加等;深度定制化地面站:基于MP地面站進(jìn)行UI全新設(shè)計(jì),功能增減,企業(yè)Logo定制;基于Mavlink協(xié)議地面站定制開發(fā)
2018-06-19 15:56:58
(pixhawk)飛控疑難雜癥解決方法匯總(持續(xù)更新)by 怒飛垂云2019年11月4日APM無法解鎖/飛控連不上/黃燈閃爍/起飛側(cè)翻/定點(diǎn)定不住/定高不穩(wěn)/電臺(tái)連不上/地面站連不上……無人機(jī)調(diào)試
2021-08-06 06:21:52
頁(yè)面下可以對(duì)飛機(jī)進(jìn)行讀寫PID調(diào)節(jié)值,也可以恢復(fù)預(yù)設(shè)的PID值,除此之外還可以隨意設(shè)置飛機(jī)的2.4G的通信信道,也可以設(shè)置為編隊(duì)模式,還可以讀取設(shè)備的版本信息,值得注意的是,一旦飛控或者遙控器鎖機(jī)后
2020-03-26 14:04:42
`地面站上位機(jī)的使用和介紹一、地面站上位機(jī)使用和介紹COCOFLY地面站上位機(jī)是配套COCOFLY無人機(jī)使用的,該地面站上位機(jī)功能非常的全。主要分為5大功能板塊,分別是基本收發(fā)、飛控設(shè)置、波形顯示
2020-04-03 18:11:36
驅(qū)動(dòng),插入上位機(jī)的通信模塊,然后選擇對(duì)應(yīng)的端口,然后打開串口,這樣無人船和地面站就可以通信了,接著我們選擇控制模式(遠(yuǎn)程控制),然后開啟系統(tǒng),這樣我們就可以在4部分看到船當(dāng)前的經(jīng)緯度,電機(jī)地圖按鈕
2016-11-07 21:38:34
的緊缺與擁塞,已不能滿足高速、寬帶等諸多應(yīng)用的需求。由于Ka頻段以上的衛(wèi)星通信系統(tǒng)具有可用帶寬寬,干擾少,設(shè)備體積小的特點(diǎn),在衛(wèi)星通信及各種形式的衛(wèi)星地面站中的應(yīng)用也日益廣泛。目前在國(guó)內(nèi)地面接力通信
2019-06-24 07:44:30
飛控整個(gè)軟件代碼運(yùn)行在定時(shí)器調(diào)度模式,同時(shí)對(duì)各個(gè)外設(shè)模塊中斷優(yōu)先級(jí)進(jìn)行了合理設(shè)計(jì),確保程序運(yùn)行的實(shí)時(shí)性和穩(wěn)健性。其中對(duì)實(shí)時(shí)性、周期性要求高的比如:傳感器數(shù)據(jù)采集、姿態(tài)解算、慣性導(dǎo)航、控制等任務(wù),采用
2022-01-20 07:12:28
第一部分 地面站 Paparazzi (簡(jiǎn)稱PPZ)UAV項(xiàng)目起始于2003年,由法國(guó)民航大學(xué)發(fā)起的一套軟硬件開源無人機(jī)項(xiàng)目,它提供了一整套完整的無人機(jī)軟硬件解決方案。 PPZ 地面站軟件運(yùn)行
2021-08-06 07:53:43
引言在一般的項(xiàng)目開發(fā)過程中,往往需要兩塊或以上單片機(jī)進(jìn)行通信完成數(shù)據(jù)傳輸,例如四旋翼無人機(jī)在飛行過程中無線傳輸數(shù)據(jù)回到地面站,治療儀器需要實(shí)時(shí)將患者和機(jī)器運(yùn)轉(zhuǎn)情況傳回上位機(jī)平臺(tái),糧倉(cāng)溫控裝置需將各種傳感器通過RS485總線...
2021-08-23 07:52:34
首先描述問題,是我一同事而非我本人遇到的,公司讓我協(xié)助他查找問題。客戶是衛(wèi)通地面站,主控電腦使用的是麒麟系統(tǒng),通過UDP和我們的設(shè)備進(jìn)行網(wǎng)絡(luò)通信,客戶每間隔一秒鐘發(fā)送一次狀態(tài)查詢指令,一天的時(shí)間內(nèi)
2021-08-24 07:44:55
申請(qǐng)理由:由于我在校長(zhǎng)時(shí)間做飛思卡爾智能車,用過ARM4.這是一款非常穩(wěn)定的單片機(jī)微處理器。對(duì)于我,操作較為熟練。項(xiàng)目描述:操控人員可以通過地面站的外接手柄對(duì)飛行器進(jìn)行姿態(tài)控制,同時(shí)可以實(shí)時(shí)觀看
2015-10-23 10:13:20
、數(shù)字化編碼和網(wǎng)絡(luò)傳輸,以及姿態(tài)信息和控制信息的網(wǎng)絡(luò)傳輸,以達(dá)到通過互聯(lián)網(wǎng)WEB頁(yè)或客戶端軟件對(duì)視頻畫面的顯示和控制信息發(fā)送的目的。操控人員可以通過地面站的外接手柄對(duì)飛行器進(jìn)行姿態(tài)控制,同時(shí)可以實(shí)時(shí)觀看
2015-06-27 08:59:22
微型四旋翼飛行器,缺少一個(gè)功能強(qiáng)大的地面站,如果使用PC進(jìn)行開發(fā)將存在攜帶困難,開發(fā)周期長(zhǎng)等問題。故想要申請(qǐng)這款開發(fā)板。進(jìn)行飛行器的控制和調(diào)試。
2015-07-20 17:39:18
了約定俗成,其實(shí)這個(gè)玩意比較臃腫,因?yàn)橛行?shù)據(jù)沒有必要。普通飛控用這玩意與地面站通信,刷新率能有50HZ就燒高香了,一般都在二三十赫茲左右。我用labview進(jìn)行測(cè)試的時(shí)候,發(fā)現(xiàn)labview用57600
2017-05-07 21:01:28
的實(shí)時(shí)顯示、數(shù)字化編碼和網(wǎng)絡(luò)傳輸,以及姿態(tài)信息和控制信息的網(wǎng)絡(luò)傳輸,以達(dá)到通過互聯(lián)網(wǎng)WEB頁(yè)或客戶端軟件對(duì)視頻畫面的顯示和控制信息發(fā)送的目的。操控人員可以通過地面站的外接手柄對(duì)飛行器進(jìn)行姿態(tài)控制,同時(shí)可以
2015-08-10 13:04:32
的實(shí)時(shí)顯示、數(shù)字化編碼和網(wǎng)絡(luò)傳輸,以及姿態(tài)信息和控制信息的網(wǎng)絡(luò)傳輸,以達(dá)到通過互聯(lián)網(wǎng)WEB頁(yè)或客戶端軟件對(duì)視頻畫面的顯示和控制信息發(fā)送的目的。操控人員可以通過地面站的外接手柄對(duì)飛行器進(jìn)行姿態(tài)控制,同時(shí)可以
2015-06-26 19:48:20
嵌入式,剛好試一下這款開發(fā)板能否滿足我們的需要。項(xiàng)目描述:使用嵌入式開發(fā)版搭建一個(gè)四旋翼地面站,通過無線連接與四旋翼飛行器通信。其他設(shè)備如手機(jī)或電腦,通過app遠(yuǎn)程連接到地面站,即可對(duì)飛行器進(jìn)行飛行控制,并且飛行器搭載了微型攝像頭,攝像頭拍攝的畫面經(jīng)地面站采集可通過網(wǎng)絡(luò)傳輸?shù)诫娔X或手機(jī)app。
2015-06-27 08:47:11
申請(qǐng)理由:本人專注于無人機(jī)的研究與開發(fā),現(xiàn)需要做一個(gè)嵌入式地面站項(xiàng)目描述:嵌入式地面站基于linux系統(tǒng),在城市里利用3g網(wǎng)絡(luò)進(jìn)行無線圖傳與無人機(jī)的飛行控制;在3g信號(hào)缺乏的曠野,地面站需架設(shè)無線圖傳、無線數(shù)傳設(shè)備將無人機(jī)采集的圖像接受處理并對(duì)無人機(jī)進(jìn)行飛行控制
2015-07-24 09:38:44
TX-RX,RX-TX。以O(shè)MNIBUSF4 SD為例,占用UART1接口,設(shè)備接線線序如下圖。三、地面站和F4固件說明TF雷達(dá)與F4建立通訊需要借助地面站進(jìn)行配置,并且燒入對(duì)應(yīng)可支持通訊的F4固件版本。此次
2019-08-09 09:53:13
進(jìn)行讀寫 PID 調(diào)節(jié)值,也可以恢復(fù)預(yù)設(shè)的 PID 值,除此之外還可以隨意設(shè)置飛機(jī)的 2.4G 的通信信道,也可以設(shè)置為編隊(duì)模式,還可以讀取設(shè)備的版本信息, 值得注意的是,一旦飛控或者遙控器鎖機(jī)后
2022-05-25 16:11:59
下可以對(duì)飛機(jī)進(jìn)行讀寫 PID 調(diào)節(jié)值,也可以恢復(fù)預(yù)設(shè)的 PID 值,除此之外還可以隨意設(shè)置飛機(jī)的 2.4G 的通信信道,也可以設(shè)置為編隊(duì)模式,還可以讀取設(shè)備的版本信息, 值得注意的是,一旦飛控或者
2022-07-08 09:55:11
進(jìn)行讀寫 PID 調(diào)節(jié)值,也可以恢復(fù)預(yù)設(shè)的 PID 值,除此之外還可以隨意設(shè)置飛機(jī)的 2.4G 的通信信道,也可以設(shè)置為編隊(duì)模式,還可以讀取設(shè)備的版本信息, 值得注意的是,一旦飛控或者遙控器鎖機(jī)后
2022-08-24 09:47:33
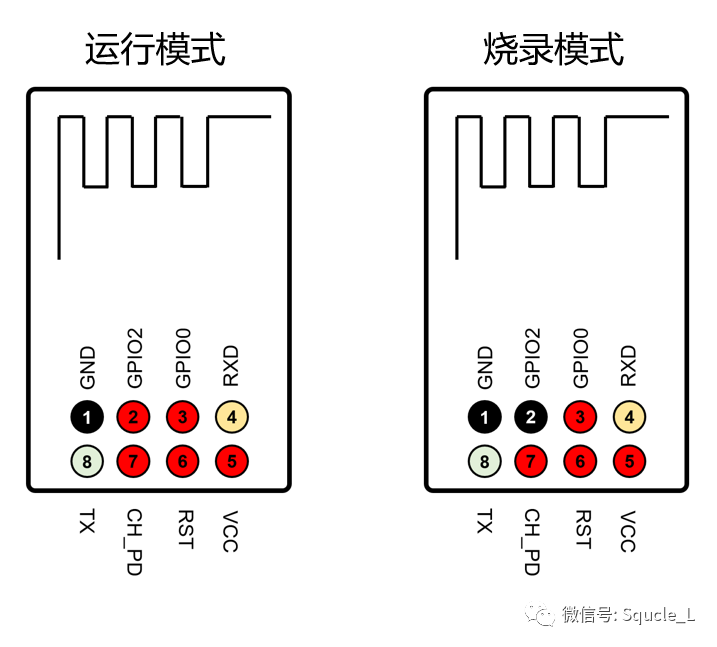
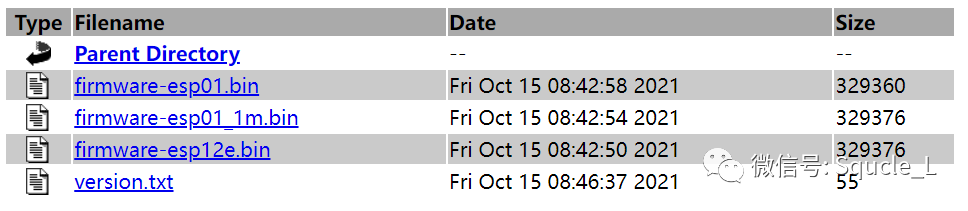
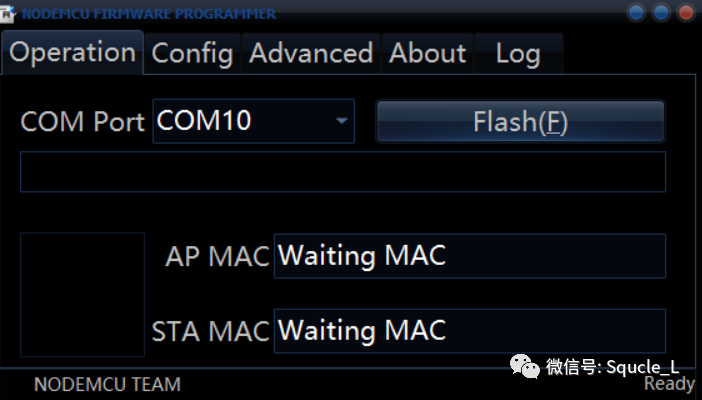
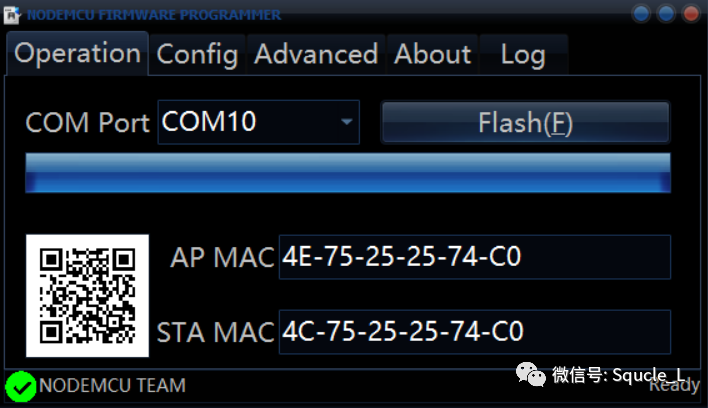
u過本人還是在校菜鳥一只,最近跟著學(xué)長(zhǎng)做東西,第一次使用WIFI模塊與stm32進(jìn)行通信,半天過去了,終于對(duì)ESP8266有了一定的理解,在此篇博客中,我只介紹如何使用(步驟以及注意事項(xiàng)),盡量不
2021-08-11 08:37:16
TCP的作用是什么?如何利用串口初始化WiFi模塊接入網(wǎng)絡(luò)?如何使用MSP430F5529單片機(jī)和ESP8266 WIFI模塊進(jìn)行單片機(jī)和TCP服務(wù)器之間的通信?
2021-08-24 07:44:57
原先做過nrf24l01點(diǎn)對(duì)多通信,想做wifi模塊之間的點(diǎn)對(duì)多通信,但是看了例程wifi AP和wifi STA之間的通信 好像不能實(shí)現(xiàn)點(diǎn)對(duì)多的通信,可以設(shè)置成路由器模式和wifi STA之間實(shí)現(xiàn)點(diǎn)對(duì)多通信么?原子大大有什么建議說說么,我都打算用zigbee來做了!糾結(jié)。
2019-03-29 04:34:31
無人機(jī)特點(diǎn):1)開源所有的源代碼及原理圖(PCB暫不開源)2)支持代碼無縫移植到其它平臺(tái)3)支持WIFI方式連接地面站4)支持WIFI方式連接手機(jī)5)支持WIFI方式連接遙控器6)支持通過地面站配置
2017-04-14 12:17:35
求助哇!當(dāng)時(shí)買板子的時(shí)候附贈(zèng)了地面站資料,但是沒有程序,聽說還要改通信協(xié)議,很復(fù)雜很絕望!幫幫忙
2017-08-03 11:47:24
買板子的時(shí)候附帶的地面站信息,但是沒給程序,聽說還要改通信協(xié)議,很復(fù)雜,怎么破啊。很絕望
2017-08-03 11:33:52
如何應(yīng)用mavlink通信協(xié)議?
2021-12-20 06:30:21
Mission Planner二次開發(fā):基于MP地面站源碼,進(jìn)行功能刪減、增加等;深度定制化地面站:基于MP地面站進(jìn)行UI全新設(shè)計(jì),功能增減,企業(yè)Logo定制;基于Mavlink協(xié)議地面站定制開發(fā)
2018-06-19 15:49:44
`Mission Planner二次開發(fā):基于MP地面站源碼,進(jìn)行功能刪減、增加等;深度定制化地面站:基于MP地面站進(jìn)行UI全新設(shè)計(jì),功能增減,企業(yè)Logo定制;基于Mavlink協(xié)議地面站定制開發(fā)
2017-12-07 15:31:30
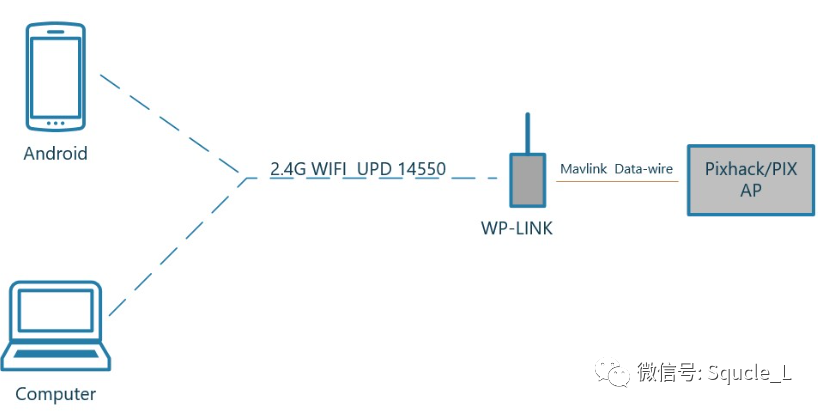
經(jīng)常有客戶問SKYLAB君,飛機(jī)端、地面中繼端和手機(jī)是如何通信的,究竟飛機(jī)端WiFi模塊 、地面中繼端WiFi模塊 、手機(jī)視頻控制端是怎么實(shí)現(xiàn)通信的呢?具體且往下看:SKW77是針對(duì)無人機(jī)遠(yuǎn)距離圖片
2018-04-20 17:28:08
wifi模塊SKW77組成的無人機(jī)飛控系統(tǒng)框架圖,系統(tǒng)包括4塊: (1)遠(yuǎn)程服務(wù)器端(2)飛機(jī)端(3)地面中繼端(4)手機(jī)視頻控制端飛控系統(tǒng)工作機(jī)制:(1)飛機(jī)端WIFI模塊SKW77與地面中繼端的wifi
2017-10-27 14:38:51
本款結(jié)合遙控器+數(shù)傳+地面站三合一多功能手持終端(簡(jiǎn)稱HGS_3IN1)開源產(chǎn)品是武漢無名創(chuàng)新科技有限公司繼以往開源產(chǎn)品:開源飛控、開源QT地面站、開源機(jī)器視覺后的又一全新力作,旨在為廣大無人機(jī)
2021-07-27 07:50:18
想在無人機(jī)上掛載一個(gè)小電腦,然后小電腦開著obs(一款視頻直播軟件),利用wifi把視頻傳輸?shù)?b class="flag-6" style="color: red">地面站,是否有實(shí)現(xiàn)的可能性,最好能給點(diǎn)方案,萬分感謝!
2017-11-26 21:58:55
文件信息編碼而成的軟件通信協(xié)議庫(kù)。MAVLink遵循一種混合發(fā)布和點(diǎn)對(duì)點(diǎn)設(shè)計(jì)模式:主要的信息可以作為主數(shù)據(jù)流向多個(gè)目標(biāo)目標(biāo)進(jìn)行發(fā)送,而一些子協(xié)議如(mission proto...
2021-08-20 06:26:45
我想用遙控器通過串口連接地面站軟件,通過NRF***,與小四軸連接來調(diào)PID,可是NRF函數(shù)這一塊寫了很久都不行,遙控器與飛控之間老是通信不了。各位大佬有沒有碰到這種問題,給點(diǎn)建議。謝謝
2019-06-12 04:35:31
利用LabVIEW(或其他軟件)實(shí)現(xiàn)地面控制站的人機(jī)接口程序;實(shí)現(xiàn)在線飛行狀態(tài)監(jiān)測(cè)、顯示飛行數(shù)據(jù)和報(bào)警信息;實(shí)現(xiàn)地面站對(duì)無人機(jī)的控制接口,包括命令控制臺(tái)、飛行參數(shù)顯示、無人機(jī)飛行航跡顯示,并能根據(jù)任務(wù)對(duì)航跡進(jìn)行實(shí)時(shí)規(guī)劃;還要能利用3D模型動(dòng)態(tài)顯示飛行器的情況
2013-05-12 22:14:13
一、地面站上位機(jī)使用和介紹COCOFLY地面站上位機(jī)是配套COCOFLY無人機(jī)使用的,該地面站上位機(jī)功能非常的全。主要分為5大功能板塊,分別是基本收發(fā)、飛控設(shè)置、波形顯示、圖形編隊(duì)以及飛控狀態(tài)
2020-04-21 09:59:28
如果是自制飛控板的話,還能用地面站軟件(mission planner)進(jìn)行刷固件或者調(diào)參么?有哪位大神可以提供一些入門的學(xué)習(xí)資料,剛開始,有點(diǎn)懵,不知如何下手。
2019-06-27 04:35:52
請(qǐng)教下大家:1、買的WiFi模塊是怎么與主控MCU進(jìn)行通信的??2、是通過串口嗎??AT指令嗎?3、如果WiFi組網(wǎng)的話,一個(gè)節(jié)點(diǎn)是不是要一個(gè)WIFI模塊??謝謝大家了,問題太弱了
2019-04-25 06:35:32
求助原子哥:我想用兩塊ATK-ESP8266 WIFI模塊進(jìn)行通信,將一塊設(shè)為了AP的tcp服務(wù)器模式,另一塊設(shè)為了STA的tcp客戶端模式,但是客戶端模式的單片機(jī)沒有顯示屏,所以想在代碼中設(shè)置固定的遠(yuǎn)端IP。請(qǐng)問要怎么配置。
2019-04-11 02:13:38
最近跟著老師學(xué)習(xí)車聯(lián)網(wǎng)的項(xiàng)目,其中有個(gè)關(guān)鍵的問題。由于路側(cè)設(shè)備通常位置比較高不便于使用有線通信,在地面使用終端對(duì)路測(cè)設(shè)備的內(nèi)部程序進(jìn)行更新時(shí),準(zhǔn)備使用WiFi進(jìn)行更新。而地面終端(一般裝裝在設(shè)備車上)使用網(wǎng)口通信,也就是說地面設(shè)備需要同時(shí)進(jìn)行WiFi和網(wǎng)口通信,請(qǐng)問兩種通信方式可以同時(shí)存在嗎?
2016-10-24 09:34:33
船的速度、方向等。自主導(dǎo)航模式下可以通過在地圖上點(diǎn)擊一個(gè)目標(biāo)點(diǎn),讓船自動(dòng)的移動(dòng)到目標(biāo)點(diǎn)。從無人船的地面站上,我們可以實(shí)時(shí)的查看到船的運(yùn)動(dòng)信息。無人船和地面站的通信使用的是數(shù)據(jù)傳輸模塊,傳輸距離2000
2016-08-27 12:45:36
軸飛行器上位機(jī),開發(fā)中省了很大的功夫啊。之前一直在用的2.6版本的,去官網(wǎng)看到有更新,特地分享給大家 《ANO_TC匿名科創(chuàng)地面站V3.1》《飛控通信協(xié)議》 還有我收藏的匿名飛行器最經(jīng)典的PID,有很大的參考價(jià)值。《ANO-MR-F1-14422經(jīng)典pid》
2018-09-19 15:52:40
采用以PC 550 型工業(yè)控制計(jì)算機(jī)為核心的衛(wèi)星地面站計(jì)算機(jī)監(jiān)控系統(tǒng),可以通過衛(wèi)星傳送系統(tǒng),對(duì)各衛(wèi)星地面站設(shè)備的運(yùn)行情況進(jìn)行遠(yuǎn)程監(jiān)控,提高了管理和控制的自動(dòng)化程度。關(guān)
2009-06-27 08:49:23 12
12 采用以PC550型工業(yè)控制計(jì)算機(jī)為核心的衛(wèi)星地面站計(jì)算機(jī)監(jiān)控系統(tǒng),可以通過衛(wèi)星傳送系統(tǒng),對(duì)各衛(wèi)星地面站設(shè)備的運(yùn)行情況的運(yùn)行情況進(jìn)行遠(yuǎn)程監(jiān)控,提高了管理和控制的自動(dòng)化
2009-07-18 08:53:5119 本文在分析研究小型衛(wèi)星地面站(VSAT)中室外單元(ODU)的監(jiān)測(cè)和控制機(jī)制基礎(chǔ)上,提出了一種新的ODU故障檢測(cè)方案。該方案通過測(cè)控平臺(tái)可以直接對(duì)ODU進(jìn)行監(jiān)控和故障檢測(cè),大
2009-08-28 14:18:5519 衛(wèi)星通信地面站,衛(wèi)星通信地面站是什么意思
任何一條衛(wèi)星通信線路都包括發(fā)端和收端地面站、上行和下行線路以及通信衛(wèi)星轉(zhuǎn)發(fā)器。
2010-04-03 11:37:36 2860
2860 地面站是衛(wèi)星導(dǎo)航通信系統(tǒng)中必不可少的重要組成部分,具備接收、發(fā)射信號(hào),監(jiān)控衛(wèi)星以及與地面通信網(wǎng)絡(luò)通信交換等功能,地面站的大天線對(duì)星跟蹤是衛(wèi)星通信開展的基礎(chǔ)。針對(duì)衛(wèi)
2012-03-20 15:24:2841 QQ 物聯(lián) WIFI 模塊 WIFI 模塊通信協(xié)議說明書。
2015-10-29 11:02:4040 ANO_TC匿名科創(chuàng)地面站v4.06!
2015-11-26 14:55:39147 ANO_TC匿名飛控地面站-0512上位機(jī)
2016-01-05 16:50:22300 詳細(xì)地介紹了無人機(jī)地面站的搭建方式,給初學(xué)者帶來了極大的便利,有需要的朋友們可以下載下來看看。
2016-01-13 17:46:255 無人直升機(jī)的設(shè)計(jì)資料 飛控地面站的資料。
2016-05-18 11:18:59167 MAVLink微型飛行器的通信協(xié)議
2017-09-03 08:52:5221 與CPU之間,通過USB接口進(jìn)行數(shù)據(jù)傳輸。USB接口是wifi模塊芯片內(nèi)部的固件程序與主機(jī)上的操作系統(tǒng)進(jìn)行數(shù)據(jù)通信的橋梁。USB接口的作用就是數(shù)據(jù)傳輸。wifi模塊
2017-09-30 16:27:4332 Wifi模塊:USB接口對(duì)于wifi模塊有什么作用?
在wifi模塊中,USB充當(dāng)什么角色呢?實(shí)質(zhì)上wifi模塊上的數(shù)據(jù)傳輸有兩端:一端是wifi芯片與wifi芯片之間,通過無線射頻(RF)進(jìn)行數(shù)據(jù)傳輸;另一端則是wifi芯片與CPU之間,通過USB接口進(jìn)行數(shù)據(jù)傳輸。
2017-10-17 15:42:1329 WIFI模塊普及_WIFI模塊通信接口介紹。WIFI模塊接口的作用是將串口數(shù)據(jù)轉(zhuǎn)換成無線網(wǎng)絡(luò)數(shù)據(jù),從而可以實(shí)現(xiàn)串口設(shè)備連接無線網(wǎng)絡(luò)。WiFi模塊常用的通訊接口一般包含這幾種:UART接口、SPI接口、I2C接口、I2S接口、SDIO接口、USB接口、RGMII接口、RMII接口等。
2017-10-19 12:26:5141 監(jiān)控軟件功能逐漸增多。因此,對(duì)地面站檢測(cè)與調(diào)試成為生產(chǎn)階段不可缺少的一個(gè)環(huán)節(jié)。目前,南于專業(yè)設(shè)備缺少,很難實(shí)現(xiàn)對(duì)整個(gè)地面站進(jìn)行獨(dú)立全面的檢測(cè)與調(diào)試,導(dǎo)致軟件與硬件中潛在問題只能在系統(tǒng)聯(lián)式后期或外場(chǎng)試飛階段發(fā)
2017-11-16 16:30:387 多天線衛(wèi)星地面站硬件設(shè)備資源分配問題是一個(gè)基于約束滿足的復(fù)雜資源組合優(yōu)化問題。在考慮任務(wù)執(zhí)行時(shí)間、地面站可見時(shí)間窗口、地面站設(shè)備接收能力和設(shè)備鏈路約束的情況下,對(duì)多天線地面站硬件資源分配問題建立
2017-11-20 10:26:1616 對(duì)全系統(tǒng)的監(jiān)控。目前,對(duì)于無人機(jī)地面站的研究已經(jīng)成為國(guó)際上的一個(gè)研究熱點(diǎn)。國(guó)外無人機(jī)系統(tǒng)地面站正在向智能化、通用化、模塊化、系列化方向發(fā)展。隨著計(jì)算機(jī)技術(shù)、計(jì)算機(jī)圖形學(xué)和虛擬現(xiàn)實(shí)技術(shù)的飛速發(fā)展,無人機(jī)地面系
2018-01-08 14:09:115 數(shù)據(jù)及狀態(tài)信息的傳輸;設(shè)計(jì)了精確頻率側(cè)音序列產(chǎn)生電路和遙控副載波產(chǎn)生電路,完成了對(duì)數(shù)據(jù)指令和狀態(tài)信息的調(diào)制;引入Xilkernel嵌入式操作系統(tǒng),對(duì)整個(gè)系統(tǒng)資源分配進(jìn)行管理,提高了系統(tǒng)的靈活性;最終形成了一個(gè)功能完整有效并具有實(shí)際應(yīng)用價(jià)值的測(cè)控應(yīng)答機(jī)地面站發(fā)射系
2018-01-09 10:16:211 通過ACARS地面站功能測(cè)試環(huán)境構(gòu)建與實(shí)現(xiàn)的基本方法,依據(jù)ARINC 618規(guī)范,對(duì)ACARS鏈路層協(xié)議進(jìn)行分析,并且軟硬件結(jié)合實(shí)現(xiàn)ACARS地面站的基本功能。首先,在Visio Studi0
2018-02-01 11:42:103 本文檔的主要內(nèi)容詳細(xì)介紹的是QGC地面站軟件使用手冊(cè)資料免費(fèi)下載。
QGC:一款基于MAVLINK協(xié)議,支持無人機(jī)編隊(duì)飛行的地面站。
QGroundControl 為 PX4
2019-02-27 08:00:0026 在WiFi模塊中,USB充當(dāng)著一個(gè)重要的角色。WiFi模塊上的數(shù)據(jù)傳輸有兩端:一端是WiFi芯片與WiFi芯片之間,通過無線射頻進(jìn)行數(shù)據(jù)傳輸;另一端則是WiFi芯片與CPU之間,通過USB接口進(jìn)行
2020-03-27 10:09:562050 本文檔的主要內(nèi)容詳細(xì)介紹的是無人機(jī)的地面站任務(wù)規(guī)劃資料和應(yīng)用程序免費(fèi)下載。
2019-06-03 08:00:004 針對(duì)某型無人機(jī)飛行監(jiān)測(cè)和控制的要求,以VC++可視化語(yǔ)言為開發(fā)工具,嵌人NI控件,設(shè)計(jì)了一套操作方便,功能強(qiáng)大的飛控地面站軟件系統(tǒng):軟件基于模塊化設(shè)計(jì)思想,采用申口通信和以太網(wǎng)兩種通信方式,申口通信
2019-08-02 17:10:5822 有人會(huì)詢問:“飛機(jī)與地面之間、飛機(jī)與飛機(jī)之間是如何相互聯(lián)絡(luò)的呢?”其實(shí)靠的的是飛機(jī)通信系統(tǒng),它包括了機(jī)內(nèi)通話。
2019-08-22 09:56:2124926 衛(wèi)星通信的原理是將衛(wèi)星發(fā)射到赤道上空36000km 處的對(duì)地靜止軌道上,利用衛(wèi)星上的通信轉(zhuǎn)發(fā)器接收由地面站發(fā)射的信號(hào),并對(duì)信號(hào)進(jìn)行放大變頻后轉(zhuǎn)發(fā)給其他地面站,從而完成兩個(gè)地面站之間的傳輸。
2019-11-26 15:57:4128656 該“綠光”即 2016 年升空的“墨子號(hào)”量子衛(wèi)星。如今,“墨子號(hào)”過境,與移動(dòng)量子衛(wèi)星地面站對(duì)接的短短幾分鐘內(nèi),已經(jīng)完成了海量的信息加密傳輸。
2019-12-31 15:01:482245 MAVLink學(xué)習(xí)之路05_MAVLink應(yīng)用編程接口分析
2020-03-07 16:21:335101 MAVLink學(xué)習(xí)之路01_認(rèn)識(shí)MAVLink
2020-03-07 16:30:558616 一種輕量級(jí)的通信協(xié)議 - MAVLink
2020-03-12 14:14:483875 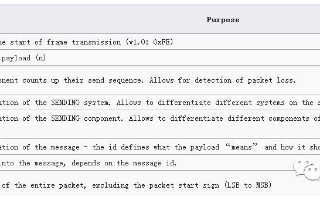
全球首個(gè)用于發(fā)送和接收加密量子通信的移動(dòng)式地面站已啟動(dòng)并正在運(yùn)行。這是繼2016年8月墨子號(hào)量子科學(xué)實(shí)驗(yàn)衛(wèi)星發(fā)射成功以來,我國(guó)科學(xué)家在量子通信領(lǐng)域取得又一成就。
2020-01-13 15:33:421836 與擁塞,已不能滿足高速、寬帶等諸多應(yīng)用的需求。由于Ka頻段以上的衛(wèi)星通信系統(tǒng)具有可用帶寬寬,干擾少,設(shè)備體積小的特點(diǎn),在衛(wèi)星通信及各種形式的衛(wèi)星地面站中的應(yīng)用也日益廣泛。目前在國(guó)內(nèi)地面接力通信系統(tǒng)中,Ka頻段收發(fā)射設(shè)備
2020-09-17 10:45:001 本月初,F(xiàn)CC批準(zhǔn)了微軟做概念驗(yàn)證服務(wù)演示的請(qǐng)求。根據(jù)批準(zhǔn),微軟擁有6個(gè)月的許可,可以進(jìn)行通信和圖像數(shù)據(jù)下載。預(yù)計(jì)微軟將在本月晚些時(shí)候的Ignite 2020會(huì)議上利用這一批準(zhǔn)來演示其地面站服務(wù)。
2020-09-14 10:02:052099 當(dāng)前的飛行路線,狀況,以及飛機(jī)的時(shí)時(shí)調(diào)度等。像我們用的無人機(jī)大部分都是單點(diǎn)地面站,單點(diǎn)地面站一般由一到多個(gè)人值守,有技術(shù)員,場(chǎng)務(wù)人員,后勤員,通信員,指揮員等人組成,像玩家一般都是一個(gè)人。
2020-09-17 11:57:4111130 S/X/Ka頻段衛(wèi)星地面站無人機(jī)測(cè)試標(biāo)校
2021-06-29 11:12:1625 本文將使用MSP430F5529單片機(jī)和 ESP8266 WIFI模塊進(jìn)行單片機(jī)和TCP服務(wù)器之間的通信。目錄1. 步驟和技術(shù)簡(jiǎn)述(上)2. 網(wǎng)絡(luò)環(huán)境搭建(上)3. 利用串口初始化單片機(jī)接入網(wǎng)
2021-11-19 17:36:0611 無人機(jī)地面站作為整個(gè)無人機(jī)系統(tǒng)的作戰(zhàn)指揮中心,是指具有對(duì)無人機(jī)飛行平臺(tái)和任務(wù)載荷進(jìn)行監(jiān)控和操縱的能力,包含對(duì)無人機(jī)發(fā)射和回收控制的一組設(shè)備。
2022-02-26 11:49:461683 地面站是衛(wèi)星通信系統(tǒng)的重要組成部分,負(fù)責(zé)與衛(wèi)星進(jìn)行通信,包括指揮衛(wèi)星的運(yùn)行、接收衛(wèi)星傳回的數(shù)據(jù)等。地面站通常由天線、收發(fā)設(shè)備、控制中心、數(shù)據(jù)處理中心等組成。
2023-06-01 18:05:414475 單片機(jī)和WiFi模塊通信的方法有以下幾種: 1. 串口通信:將單片機(jī)與WiFi模塊通過串口連接,單片機(jī)通過串口發(fā)送命令給WiFi模塊,模塊接收并響應(yīng)。
2023-06-13 17:56:048584 電子發(fā)燒友網(wǎng)站提供《CAPS地面站天線跟蹤衛(wèi)星分析.pdf》資料免費(fèi)下載
2023-10-24 11:47:590 隨著小型衛(wèi)星數(shù)量的激增,一個(gè)大問題就此產(chǎn)生,即如何與地面通信。近地軌道衛(wèi)星大約每90分鐘環(huán)繞地球一周,因此通常只有10分鐘的窗口時(shí)間與指定的地面站進(jìn)行通信。
2023-12-15 17:09:59241 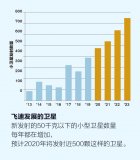
嵌入式開發(fā)過程中,UART、 CAN、 USB等通信基本離不開通信協(xié)議。 下面給大家分享一種通信協(xié)議(MAVLink)在應(yīng)用編程中的編程原理和思路。
2024-03-08 12:45:20109 
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論