 電子發燒友App
電子發燒友App


SPI 的英文全稱為 Serial Peripheral Interface,顧名思義為串行外設接口。SPI 是一種同步串行通信接口規范,主要應用于嵌入式系統中的短距離通信。該接口由摩托羅拉在20世紀80年代中期開發,后發展成了行業規范。
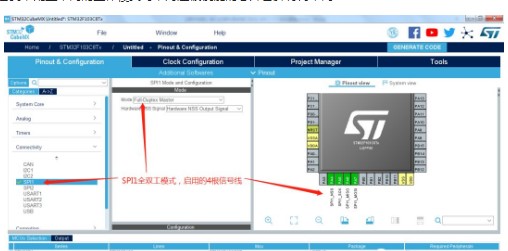
SPI 是一種高速的、全雙工的、同步的通信總線,并且至多僅需使用 4 根線,節約了芯片的管腳,SPI主要應用于EEPROM、FLASH、ADC、DAC等芯片,還有數字信號處理器和數字信號解碼器之間。
SPI 設備之間采用全雙工模式通信,是一個主機和一個或者多個從機的主從模式。主機負責初始化幀,這個數據傳輸幀可以用于讀與寫兩種操作,片選線可以從多個從機選擇一個來響應主機的請求。
來自主機或從機的數據在時鐘上升沿或下降沿同步。主機和從機可以同時傳輸數據。SPI接口可以是 3 線式或 4 線式。本文重點介紹常用的 4 線 SPI 接口。
接 口
4 線 SPI 器件有四個信號:
時鐘(SPICLK,SCLK)
片選(CS)主機輸出
從機輸入(MOSI)主機輸入
從機輸出(MISO)
產生時鐘信號的器件稱為主機。主機和從機之間傳輸的數據與主機產生的時鐘同步。同I2C接口相比,SPI器件支持更高的時鐘頻率。用戶應查閱產品數據手冊以了解SPI接口的時鐘頻率規格。
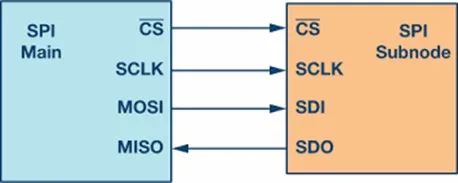
SPI接口只能有一個主機,但可以有一個或多個從機。圖1 顯示了主機和從機之間的SPI連接。
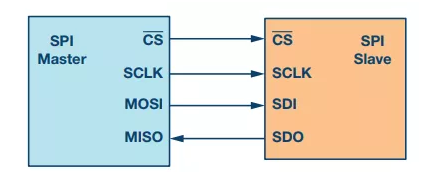
圖1. 含主機和從機的SPI配置
來自主機的片選信號用于選擇從機。這通常是一個低電平有效信號,拉高時從機與SPI總線斷開連接。當使用多個從機時,主機需要為每個從機提供單獨的片選信號。本文中的片選信號始終是低電平有效信號。
MOSI和MISO是數據線。MOSI將數據從主機發送到從機,MISO將數據從從機發送到主機。
數據傳輸
要開始SPI通信,主機必須發送時鐘信號,并通過使能CS信號選擇從機。片選通常是低電平有效信號。因此,主機必須在該信號上發送邏輯0以選擇從機。
SPI是全雙工接口,主機和從機可以分別通過MOSI和MISO線路同時發送數據。在SPI通信期間,數據的發送(串行移出到MOSI/SDO總線上)和接收(采樣或讀入總線(MISO/SDI)上的數據)同時進行。串行時鐘沿同步數據的移位和采樣。
SPI接口允許用戶靈活選擇時鐘的上升沿或下降沿來采樣和/或移位數據。欲確定使用SPI接口傳輸的數據位數,請參閱器件數據手冊。
時鐘極性和時鐘相位
在 SPI 中,主機可以選擇時鐘極性和時鐘相位。在空閑狀態期間,CPOL 為設置時鐘信號的極性。空閑狀態是指傳輸開始時 CS 為高電平且在向低電平轉變的期間,以及傳輸結束時 CS 為低電平且在向高電平轉變的期間。CPHA 為選擇時鐘相位。
根據CPHA位的狀態,使用時鐘上升沿或下降沿來采樣和/或移位數據。主機必須根據從機的要求選擇時鐘極性和時鐘相位。根據 CPOL 和 CPHA 位的選擇,有四種SPI 模式可用。表1顯示了這 4 種 SPI 模式。

表1.通過CPOL和CPHA選擇SPI模式
圖2至圖5顯示了四種SPI模式下的通信示例。在這些示例中,數據顯示在MOSI和MISO線上。?傳輸的開始和結束用綠色虛線表示?,?采樣邊沿用橙色虛線表示,移位邊沿用藍色虛線表示?。請注意,這些圖形僅供參考。要成功進行SPI通信,用戶須參閱產品數據手冊并確保滿足器件的時序規格。
圖2 給出了SPI模式0的時序圖。在此模式下,時鐘極性為0,表示時鐘信號的空閑狀態為低電平。此模式下的時鐘相位為0,表示數據在上升沿采樣(由橙色虛線顯示),并且數據在時鐘信號的下降沿移出(由藍色虛線顯示)。
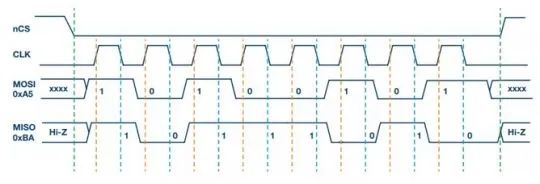
圖2. SPI模式0,CPOL = 0,CPHA = 0:CLK空閑狀態 = 低電平,數據在上升沿采樣,并在下降沿移出
圖3 給出了SPI模式1的時序圖。在此模式下,時鐘極性為0,表示時鐘信號的空閑狀態為低電平。此模式下的時鐘相位為1,表示數據在下降沿采樣(由橙色虛線顯示),并且數據在時鐘信號的上升沿移出(由藍色虛線顯示)。
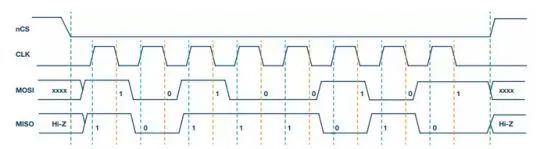
圖3. SPI模式1,CPOL = 0,CPHA = 1:CLK空閑狀態 = 低電平,數據在下降沿采樣,并在上升沿移出
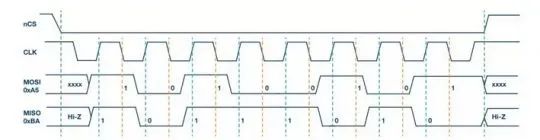
圖4. SPI模式2,CPOL = 1,CPHA = 1:CLK空閑狀態 = 高電平,數據在下降沿采樣,并在上升沿移出
圖4 給出了SPI模式2的時序圖。在此模式下,時鐘極性為1,表示時鐘信號的空閑狀態為高電平。此模式下的時鐘相位為1,表示數據在下降沿采樣(由橙色虛線顯示),并且數據在時鐘信號的上升沿移出(由藍色虛線顯示)。
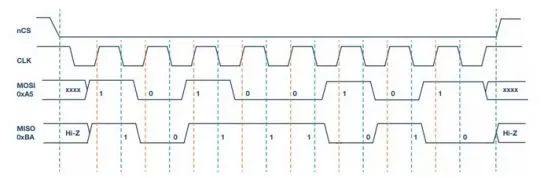
圖5. SPI模式3,CPOL = 1,CPHA = 0:CLK空閑狀態 = 高電平,數據在上升沿采樣,并在下降沿移出
圖5 給出了SPI模式3的時序圖。在此模式下,時鐘極性為1,表示時鐘信號的空閑狀態為高電平。此模式下的時鐘相位為0,表示數據在上升沿采樣(由橙色虛線顯示),并且數據在時鐘信號的下降沿移出(由藍色虛線顯示)。
多從機配置
多個從機可與單個 SPI 主機一起使用。從機可以采用常規模式連接,或采用菊花鏈模式連接。
常規SPI模式
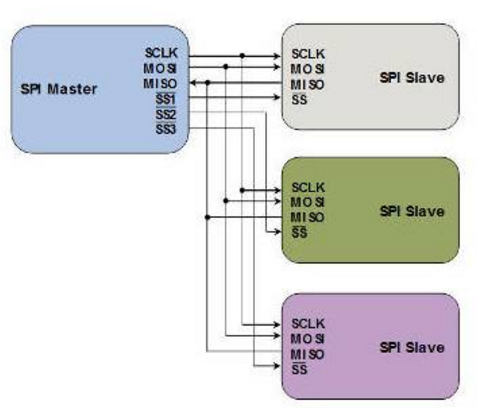
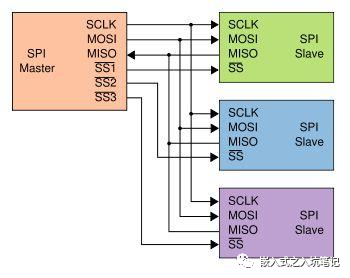
在常規模式下,主機需要為每個從機提供單獨的片選信號。一旦主機使能(拉低)片選信號,MOSI/MISO線上的時鐘和數據便可用于所選的從機。如果使能多個片選信號,則MISO線上的數據會被破壞,因為主機無法識別哪個從機正在傳輸數據。
從圖6可以看出,隨著從機數量的增加,來自主機的片選線的數量也增加。這會快速增加主機需要提供的輸入和輸出數量,并限制可以使用的從機數量。可以使用其他技術來增加常規模式下的從機數量,例如使用多路復用器產生片選信號。
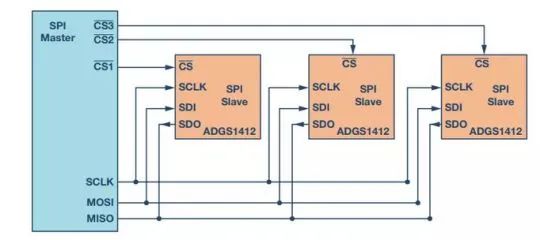
圖6. 多從機SPI配置
菊花鏈模式
在菊花鏈模式下,所有從機的片選信號連接在一起,數據從一個從機傳播到下一個從機。在此配置中,所有從機同時接收同一SPI時鐘。來自主機的數據直接送到第一個從機,該從機將數據提供給下一個從機,依此類推。
使用該方法時,由于數據是從一個從機傳播到下一個從機,所以傳輸數據所需的時鐘周期數與菊花鏈中的從機位置成比例。例如在圖7所示的8位系統中,為使第3個從機能夠獲得數據,需要24個時鐘脈沖,而常規SPI模式下只需8個時鐘脈沖。
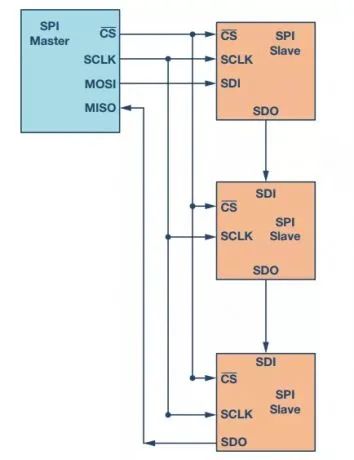
圖7. 多從機SPI菊花鏈配置
圖8顯示了時鐘周期和通過菊花鏈的數據傳播。并非所有SPI器件都支持菊花鏈模式。請參閱產品數據手冊以確認菊花鏈是否可用。
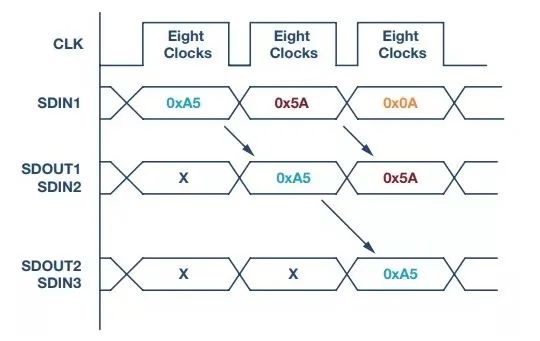
圖8. 菊花鏈配置:數據傳播
ADI公司最新一代支持SPI的開關可在不影響精密開關性能的情況下顯著節省空間。本文的這一部分將討論一個案例研究,說明支持SPI的開關或多路復用器如何能夠大大簡化系統級設計并減少所需的GPIO數量。
ADG1412是一款四通道、單刀單擲(SPST)開關,需要四個GPIO連接到每個開關的控制輸入。圖9顯示了微控制器和一個ADG1412之間的連接。
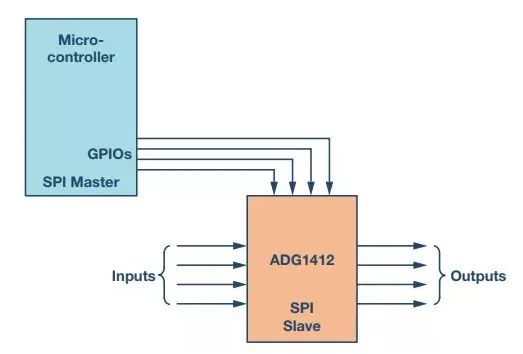
圖9. 微控制器GPIO用作開關的控制信號
隨著電路板上開關數量的增加,所需GPIO的數量也會顯著增加。例如,當設計一個測試儀器系統時,會使用大量開關來增加系統中的通道數。在4×4交叉點矩陣配置中,使用四個ADG1412。此系統需要16個GPIO,限制了標準微控制器中的可用GPIO。圖10顯示了使用微控制器的16個GPIO連接四個ADG1412。
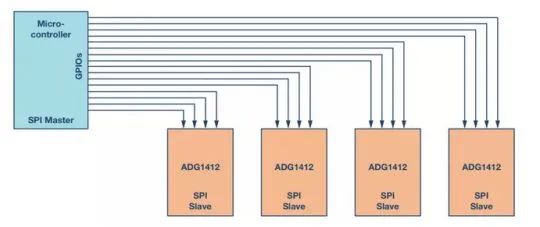
圖10. 在多從機配置中,所需GPIO的數量大幅增加
如何減少GPIO數量?
一種方法是使用串行轉并行轉換器,如圖11所示。該器件輸出的并行信號可連接到開關控制輸入,器件可通過串行接口SPI配置。此方法的缺點是外加器件會導致物料清單增加。
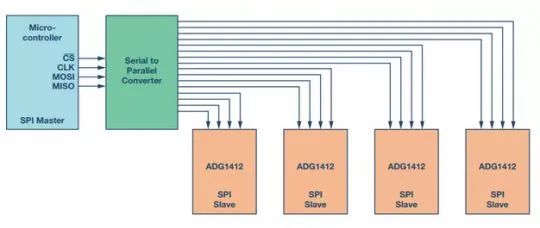
圖11. 使用串行轉并行轉換器的多從機開關
另一種方法是使用SPI控制的開關。此方法的優點是可減少所需GPIO的數量,并且還能消除外加串行轉并行轉換器的開銷。如圖12所示,不需要16個微控制器GPIO,只需要7個微控制器GPIO就可以向4個ADGS1412提供SPI信號。開關可采用菊花鏈配置,以進一步優化GPIO數量。在菊花鏈配置中,無論系統使用多少開關,都只使用主機(微控制器)的四個GPIO。
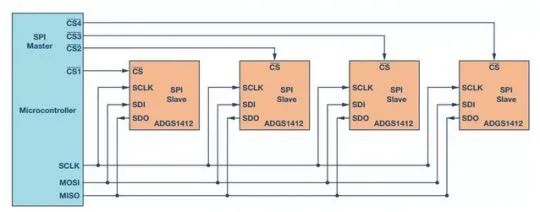
圖12. 支持SPI的開關節省微控制器GPIO
圖13用于說明目的。ADGS1412數據手冊建議在SDO引腳上使用一個上拉電阻。為簡單起見,此示例使用了四個開關。隨著系統中開關數量的增加,電路板簡單和節省空間的優點很重要。
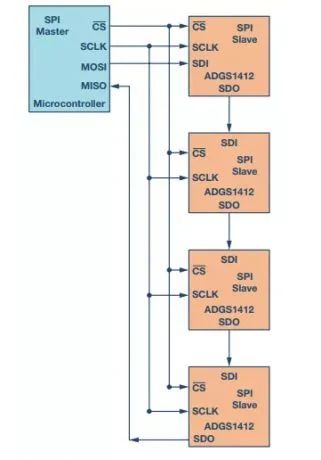
圖13. 菊花鏈配置的SPI開關可進一步優化GPIO
在6層電路板上放置8個四通道SPST開關,采用4×8交叉點配置時,ADI 公司支持 SPI 的開關可節省20%的總電路板空間。
SPI 協議的優缺點
SPI 的優點在于它有著比 I2C 更高的吞吐量,不被最大時鐘速度所限制,可實現潛在的高速、極為簡單的硬件接口,外圍電路使用的上拉電阻是比 I2C 協議更少的,這意味著它具有比I2C的功耗更低、從機的時鐘來源來自主機設備,無需新增精密振蕩器、從機不需要唯一的地址、相對于并行接口而言,使用的引腳數目大大減少等優點。
但同時有著一定的缺點,例如SPI沒有帶內尋址、當使用多個不同模式的從機設備時,主機設備切換模式時重新初始化,會使得訪問從機設備速度變慢、SPI從機設備沒有硬件流控,只能通過主機自主的延遲下個時鐘周期到來的時間、僅能在短距離通信等缺點。但能在避免SPI的缺點的方向來應用SPI的話,SPI的優點讓它遠遠優于其他協議。
















 工商網監
工商網監
評論