 電子發燒友App
電子發燒友App


開放式控制平臺及其在無人潛航器制導系統中的應用
重點分析了開放式控制平臺(OCP)的基本結構和中間件技術,并針對目前無人潛航器(UUV)制導系統存在的開發局限性,提出了基于OCP的開放式無人潛航器制導系統結構和軟硬件實現體系。
關鍵詞:? 開放式控制平臺; 軟件使能控制; 嵌入式操作系統; 無人潛航器
2004年7月波音公司首次驗證有人駕駛戰斗機與無人機UAV(Unmanned Aerial Vehicle)協同飛行的能力,并驗證了無人機的自主控制能力,包括實時防止空中相撞能力、自主規避機動能力、自主改變航線以響應突如其來的威脅和飛行故障[1]。這次試驗是作為美國國防高級研究計劃局DARPA(Defense Advanced Research Projects Agency)提出的軟件激活控制SEC(Software Enabled Control)[2]計劃的一部分。SEC是重要的實時軟件技術,實現SEC的關鍵是開發新的控制算法和軟件技術。開放式控制平臺(OCP)是一個開放式、基于中間件技術的軟件結構和嵌入式控制系統開發平臺。該項目的目標是開發和演示尖端飛行控制技術以極大地增強先進無人機的自主操作。開發的SEC軟件基于波音公司的開放控制平臺OCP [3]架構,OCP為快速制造原型機和輕松集成在SEC項目下開發的先進控制技術奠定了基礎。OCP是面向對象的軟件,它支持控制系統的軟硬件跨平臺的無縫連接,其目的是提升UAV的控制能力和嵌入式軟件的開發、分析和測試仿真能力,并支持系統的重新配置、多平臺的交互操作等。
無人潛航器UUV是一種主要以潛艇或水面艦艇為支援平臺、能長時間在水下自主遠程航行的智能化裝置,可以攜帶多種專用設備或武器,執行特定的任務和使命。20世紀90年代,世界各主要海軍國家開始關注UUV在軍事領域的應用前景,并相繼開發出了一批多用途的無人潛航器。與傳統潛艇相比,無人潛航器具有使用靈活、隱蔽性強、適應復雜海況以及可有效減少人員傷亡的特點。因此,美國海軍于1999年提出了一套完整的無人潛航器發展計劃,開始大力發展軍用UUV系統,并希望其能夠達到與無人飛機相類似的多用途性和通用性。2005年1月,美國海軍發布了新的《無人潛航器(UUV)總體規劃》,該規劃將無人潛航器提高到與無人機、無人戰車和機器士兵研究同等重要的位置。
機動控制和制導技術是UUV的關鍵技術之一,自動化程度的高低直接決定UUV的整體性能。要求水下自主遠距離航行時,在無人控制下,能自動收集并傳送信息,探測、評估并主動規避威脅目標和障礙物;在出現不可預知情況及惡劣水文條件時,可根據任務目標、周圍環境情況和剩余動力,迅速做出反應,自主決策,返回母艦或與其他平臺合作,組成UUV編隊,協同完成任務。
本文主要研究了OCP和SEC的基本結構、嵌入式中間件結構,結合OCP、嵌入式操作系統、實時網絡等計算機技術和控制技術來分析UUV的制導系統,提出未來新型UUV制導系統一般性結構和設計的方法,實現控制算法和軟硬件平臺相結合的結構體系。該體系將會為開發新一代的UUV提供一個高技術的平臺,并降低UUV開發的難度和費用。
1 OCP的基本結構和中間件技術
目前的自主航行器系統受到計算機技術、控制理論、網絡通信技術和嵌入式系統的影響已經得到空前的發展和突破。其最顯著的特點是系統越來越復雜,戰術指標越來越高。任務的復雜性、環境的不確定性、系統內多硬件和多軟件平臺是目前UUV的最主要特征。這給UUV的開發帶來非常大的困難,不但要求開發者有專業領域的知識,還要具備計算機操作系統和硬件的知識。如果計算機工程師向用戶提供的平臺包括硬件和嵌入式操作系統,并利用中間件技術隔離應用程序和操作系統,這樣,UUV工程師就可以集中精力開發自己擅長的專業領域控制軟件。
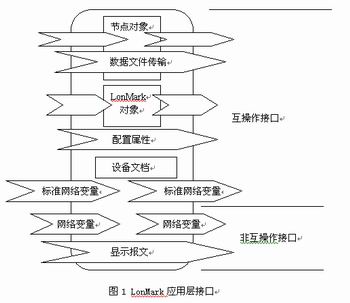
基于嵌入式系統的OCP技術在結構上與傳統集中控制系統大致相同,其在操作系統之上設計有一層中間件,如圖1所示。它將應用程序接口API(Application Programming Interface)與操作系統隔離,使得這種平臺具備真正的開放式結構和可重新配置能力,并且適合多類型的硬件和軟件平臺。同時OCP的各控制單元在物理位置上可與測量變送單元和操作執行單元合為一體,可以在現場構成完整的基本控制系統。
?

對于開放式控制平臺的無人潛航器制導系統,采用OCP的主要目的是將中間件技術引入到航行器處理系統中,包括UUV的航行管理、自動駕駛控制、系統存儲器管理和武器發射控制等。
采用OCP中間件還包括:
(1) 運行時間結構和中間件。OCP使用中間件將各類不同的嵌入式系統綜合在一起,控制各類軟件的執行和通信。中間件的另一個重要任務是隔離應用程序和操作系統,使得用戶開發應用程序時,與操作系統平臺和硬件平臺無關。
(2) 仿真環境。仿真環境則允許嵌入式系統在一個虛擬的環境中實現,例如讀取航行器的各傳感器信號,給執行機構發布執行指令等。
(3) 工具綜合。工具綜合提供給航行器開發者使用包括Matlab/Simulink等軟件的接口,允許開發者更有效地使用 這些工具開發航行器的嵌入式軟件,如快速控制原型(RCP)、硬件在回路仿真等設計手段。
目前OCP的中間件技術有多種選擇,較多采用的是國際OMG(Object Management Group)組織推出的分布式對象計算標準CORBA(Common Object Request Broker Architecture)。但由于通用CORBA規范并不是針對分布式實時應用而制定的,因而缺乏對可預測性、包括時間的確定性、低延遲、QoS等應有的實時特性的支持。所以,需要將CORBA技術本身進行改進和擴展,以滿足分布式實時應用的需要。本質上講,實時CORBA系統是一個面向對象的分布式實時中間件,能夠支持具有不同特性的分布式實時應用系統,具有較高的性能和有效控制系統資源的能力。
平臺無關性、語言無關性和網絡協議無關性是CORBA具有的三個重要特性,它的基礎核心是ORB。正是利用了CORBA基于事件通信的技術實現了OCP內部的分布式處理和內部組件之間的通信,滿足了UUV復雜系統的許多要求,例如:實時路徑規劃、混合系統的自主管理、結構的可重新動態配置以及對UUV傳感器和執行器的實時觸發等。
2 開放式無人潛航器制導系統控制平臺
2.1 新型UUV制導系統結構及其特點
UUV制導系統的復雜性主要表現在目標和UUV本體運動信息的獲取、自導律和控制律的產生、作戰有效性和對抗決策等。UUV系統具有多CPU硬件平臺和多操作系統軟件平臺,各平臺的通信也具有多樣性,即UUV是一種典型的異構網絡平臺。在參考文獻[4]、[5]中提出了基于現場總線和嵌入式系統的UUV制導系統結構,可以實現制導大回路一體化,但系統開發復雜,對工程師的專家知識要求很高,不利于嵌入式技術在UUV中的應用。本文在參考文獻[6]的基礎上提出基于SEC和OCP技術設計新型開放式UUV制導系統,正是為了解決嵌入式技術在UUV中的應用瓶頸。首先涉及到的技術就是異構平臺信息的統一管理和信息融合,以便能全息地利用各類信號,支撐制導全系統的有效和可靠地運行。
在UUV的設計中,微處理器、微控制器、數字信號處理器等得到普遍應用,并構成多種運算處理平臺。有些使用傳統的DOS操作系統,有些甚至不使用操作系統。這不但帶來了諸如布線、屏蔽、抗干擾、隔離地等眾多問題,而且無論從重量、電磁干擾、可靠性等方面都非常不利于UUV總體性能的提高,不利于UUV武器系統的研發和生產。
因此,本文提出的采用現場總線、嵌入式操作系統和OCP技術,構造UUV制導系統,是因為這種新型結構具有的結構可重新配置和軟件的可重用性,可以從根本上解決以上難題。
2.2? 基于OCP技術的UUV制導系統
在現代UUV的設計中,大多以控制系統為中心,完成信號的綜合、判斷,協調其他各系統的動作流程。這為現場總線、嵌入式操作系統和OCP技術的采用提供了很大的便利條件,其中基于現場總線和實時多任務嵌入式操作系統的控制節點結構、網絡控制系統分析在參考文獻[4-6]已經進行過研究,本文將從OCP技術的角度給出控制節點結構特點和性能。
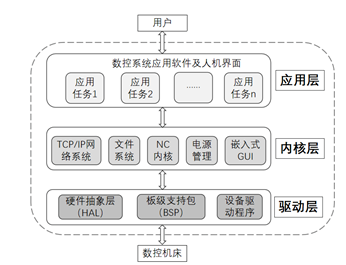
圖1表示了基于OCP的控制節點的典型結構。與參考文獻[6]中圖2結構的不同之處在于:在VxWorks操作系統和應用程序之間增加了OCP中間件層,并要求用戶開發的應用程序也要按照面向對象技術和層次的概念來開發,使得應用程序與操作系統分離。其次該結構可以滿足基于OCP技術的要求,包括實時性、高可靠性、系統的靈活性和系統的可重新配置等。在OCP中間件層中,要求系統開發商能夠向用戶提供與操作系統無關的標準應用程序接口(API)。API接口包括底層I/O驅動、操作系統的管理等。標準API接口可以保證應用程序與操作系統的無關性,這樣不但便于系統的開發,也便于今后操作系統的升級、應用程序的修改和升級。

以UUV姿態控制為例,基于OCP的控制系統的典型結構是分層控制結構。如圖2所示,可以非常明顯地看出,根據UUV主控節點的功能,將控制劃分為三個層次:
(1) 系統底層控制主要完成控制系統最基本的功能,如系統的穩定性、調節時間控制等,這層是所有系統最基本的,該層也負責與節點的操作系統打交道。由于CORBA的ORB是一種軟總線技術,負責提供對象間信息流通所需的通路,不同硬件平臺在傳遞參數時均使用自己的格式,一旦進入ORB,CORBA均將其轉換為一種通用的格式。因此在采用了ORB技術后,該節點的許多子程序可以被網絡上其他節點調用,即使調用節點使用的軟硬件平臺不一致也沒有關系。
(2) 中間層的控制作用主要是完成系統的離散事件處理,如模態的變換、故障的處理等。模態是指航行器從一種航行狀態到另一種航行狀態的變換。故障處理包括系統故障的識別、故障檢測、故障隔離以及為了處理系統故障而采用的系統控制的重新配置。另外,該層還要負責處理來自傳感器的信號,包括信號的濾波、信號的識別等。尤其是當出現傳感器故障時,該層還負責信息融合、傳感器故障的識別、隔離和信號的重構。
(3)高層控制器是UUV制導系統主控節點的中樞,功能包括系統的程序彈道設置以及為完成系統任務而需要的航程規劃等。
主控制器節點控制算法的分層是為了適應基于嵌入式系統的OCP結構,它能完全滿足圖1所示的軟件結構。圖2的中間層和高層控制可以按所選用的ORB規范設計成通用組件模塊,可供本節點使用,也可供其他節點調用。
2.3 中間件技術和異構網絡及其在UUV制導系統中的作用
基于CORBA的OCP技術在UUV制導系統中的主要作用可以歸結為兩點:軟總線技術和中間件技術。
基于OCP的嵌入式UUV制導系統軟件框架的核心,是在現場總線和實時多任務操作系統基礎上的分布式控制平臺上的應用程序采用了實時CORBA技術,而ORB又是CORBA的核心。如前所述,ORB的作用實質上是一條軟總線,所有的組件都掛接在該總線上。只要遵照規定的總線通信協議,ORB允許在不同平臺下的最底層的組件能夠相互通信。在TTCAN實時總線[6]的支持下,實時CORBA的中間件技術支持分布式處理和內部組件之間的實時通信,圖3表示了基于ORB軟總線的UUV姿態控制的結構圖(其中姿態控制器組件的結構如圖2所示)。
在圖3中的軟總線上有5個節點組件,系統的陀螺儀和慣性組件所敏感的信號都可以作為UUV姿態的控制信號,但陀螺儀和慣性組件所敏感的信號具有不同的精度和時間標尺。利用中間件的軟總線技術系統的可重新配置功能,姿態控制器可以很容易地根據兩組敏感元件的輸出和系統的需求進行敏感元件的切換,而不必根據全系統的性能來決定這兩個敏感元件的切換。因此,系統中的事件通道可以根據局部的需要來極小化組件的切換。
在計算機軟硬件系統中,層次是一個非常重要的概念和技術,幾乎所有的操作系統和應用軟件都是按層次結構設計的。由于OCP的作用是隔離操作系統和應用組件,因此,采用這種中間件技術可以更有效地做系統開發,可以使工程師在開發應用系統時不必要有過多的操作系統知識,而可集中精力在自己的應用程序上。其次,由于采用中間件技術,OCP具有與系統無關性,這樣在進行系統原理設計時,底層的平臺就能夠使用比較熟悉的軟件系統,如Windows等,而不必要一開始就使用類似的VxWorks,以便能夠更有效和更快地做出方案設計。
3 基于OCP技術的UUV制導系統的特點
OCP是美國DARPA的SEC規范中的一個重要部分。DARPA提出SEC的主要目的就是為了解決復雜的UAV控制問題,目前國外有關SEC和OCP的研究報告也主要集中在無人自主航行器上,包括空中航行器、地面航行器和無人旋翼飛機。出于保密的原因,尚未看到在UUV武器中的研究報告。但由以上研究可以看出,基于SEC和OCP技術的UUV制導系統有許多特點:
(1) SEC和OCP,包括CORBA都是一種規范,國外包括波音公司在內的許多大公司都在圍繞這些規范開發自己的應用系統,開發自己的適合UUV的軟硬件規范和實時總線協議規范,對于指導UUV規范的發展非常有利。
(2) 采用中間件技術可以有效地解決目前UUV內部的多CPU型號和多操作系統帶來的問題,由此不但可以降低系統的開發成本和縮短研制時間,還可以提高系統的可靠性、可維護性和可擴展性。
(3) OCP使用中間件技術與操作系統無關性,可以最大限度地解決目前嵌入式系統開發的難度。在最底層的硬件和操作系統的基礎上,UUV工程師可以按照規范來設計應用程序。這樣可以制定項目開發規范和規章,更好地解決目前UUV武器系統開發中各自為戰的局面,對提高系統的質量有很大的好處。
(4) SEC和OCP在UUV中的應用必須建立在實時多任務嵌入式和實時總線的基礎上,才能夠充分發揮OCP的功能。
(5) 目前國內的SEC和OCP技術,與實際應用還存在一些距離,尤其是工程化的問題、組件的數字化問題、相應的新的控制技術和制導技術的變化等問題。在國內,這些新技術在UUV研制中的應用雖然還是空白,但它具有廣闊的前景。
本文研究了當前復雜系統控制的主流技術,即基于SEC的開放式控制平臺,并著重探討了OCP技術及其在UUV制導系統中的應用及關鍵技術。UUV制導系統本身具有信息復雜性、不完整性和多目標決策等特點,決定了其導引和控制的難度。由于現場總線、網絡控制理論的應用和目前UUV武器的開發各自為戰的現狀,使得UUV武器系統具有多硬件平臺和多軟件平臺,已經構成一個典型的異構性網絡。對這類復雜的異構網絡系統如果沒有一個規范和統一的通信協議,必將使得系統控制具有很高的技術難度,也會阻礙進一步的發展。而美國DARPA倡導的SEC技術是實現這一要求的有效技術之一,目前包括美國波音公司等在內的公司正在將此技術大量應用在UUV的控制系統中。
開放式控制平臺不是一個孤立的技術,它涉及嵌入式操作系統、實時現場總線、快速控制原型、硬件在回路仿真、網絡控制系統等多個方面,而這些都是目前計算機和控制中的最新技術和理論。在UUV制導系統中引入SEC和OCP這些新的理論和技術,為UUV制導系統中許多目前存在的問題提供解決問題的新途徑。
參考文獻
[1]?KEVICZKY T,? BALAS G J. Flight test of a receding horizon controller for autonomous UAV guidance.2005.in:?American Control Conference, Portland, OR, USA,2005:?8-10.
[2] BONNIE S. Software enabled control: background and?motivation. Proceedings of the American Control Conference, Arlington, VA June 2001:25-27.
[3]?PAUNICKA J, MENDEL B, CORMAN D. The OCP-an ??open middleware solution for embedded systems, Proceedings of the American Control Conference, Arlington, VA?June 2001:25-27.
[4]?吳旭光.現場總線技術及其在魚雷中的應用.魚雷技術,2002(1):12-15.
[5]?王慧,吳旭光.基于嵌入式技術的魚雷制導系統結構研究.魚雷技術,2004(2):25-28.
[6]?吳旭光,路亞娟,唐苗.基于網絡控制系統的魚雷制導系統結構. 魚雷技術,2005(1):18-21













 工商網監
工商網監
評論