 電子發燒友App
電子發燒友App


?
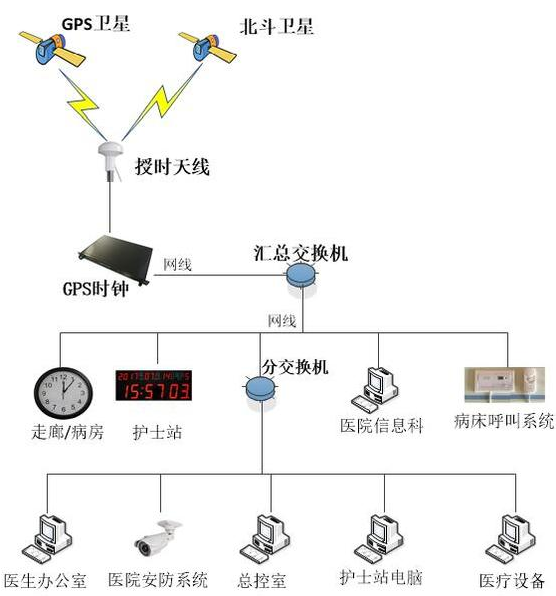
GPS時鐘系統是針對自動化系統中的計算機、控制裝置等進行校時的高科技產品,GPS數字產品它從GPS衛星上獲取標準的時間信號,將這些信息通過各種接口類型來傳輸給自動化系統中需要時間信息的設備(計算機、保護裝置、故障錄波器、事件順序記錄裝置、安全自動裝置、遠動RTU),這樣就可以達到整個系統的時間同步。
一、GPS時鐘、輸出及各種應用
1.1 GPS時鐘
全球定位系統(Global Positioning System,GPS)由一組美國國防部在1978年開始陸續發射的衛星所組成,共有24顆衛星運行在6個地心軌道平面內,根據時間和地點,地球上可見的衛星數量一直在4顆至11顆之間變化。
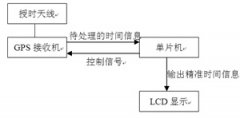
GPS時鐘是一種接受GPS衛星發射的低功率無線電信號,通過計算得出GPS時間的接受裝置。為獲得準確的GPS時間,GPS時鐘必須先接受到至少4顆GPS衛星的信號,計算出自己所在的三維位置。在已經得出具體位置后,GPS時鐘只要接受到1顆GPS衛星信號就能保證時鐘的走時準確性。
作為火電廠的標準時鐘,我們對GPS時鐘的基本要求是:至少能同時跟蹤8顆衛星,有盡可能短的冷、熱啟動時間,配有后備電池,有高精度、可靈活配置的時鐘輸出信號。
1.2 GPS時鐘信號輸出
目前,電廠用到的GPS時鐘輸出信號主要有以下三種類型:
1.2.1 1PPS/1PPM輸出
此格式時間信號每秒或每分時輸出一個脈沖。顯然,時鐘脈沖輸出不含具體時間信息。
1.2.2 IRIG-B輸出
IRIG(美國the Inter-Range Instrumentation Group)共有A、B、D、E、G、H幾種編碼標準(IRIG Standard 200-98)。其中在時鐘同步應用中使用最多的是IRIG-B編碼,有bc電平偏移(DC碼)、1kHz正弦載波調幅(AC碼)等格式。IRIG-B信號每秒輸出一幀(1fps),每幀長為一秒。一幀共有100個碼元(100pps),每個碼元寬10ms,由不同正脈沖寬度的碼元來代表二進制0、1和位置標志位(P)。
此時鐘輸出通過EIA標準串行接口發送一串以ASCII碼表示的日期和時間報文,每秒輸出一次。時間報文中可插入奇偶校驗、時鐘狀態、診斷信息等。
1.3 電力自動化系統GPS時鐘的應用
電力自動化系統內有眾多需與GPS時鐘同步的系統或裝置,如DCS、PLC、NCS、SIS、MIS、RTU、故障錄波器、微機保護裝置等。在確定GPS時鐘時應注意以下幾點:
(1)這些系統分屬熱控、電氣、系統專業,如決定由DCS廠商提供的GPS時鐘實現時間同步(目前通常做法),則在DCS合同談判前,就應進行專業間的配合,確定時鐘信號接口的要求。(GPS時鐘一般可配置不同數量、型式的輸出模塊,如事先無法確定有關要求,則相應合同條款應留有可調整的余地。)
(2)各系統是否共用一套GPS時鐘裝置,應根據系統時鐘接口配合的難易程度、系統所在地理位置等綜合考慮。各專業如對GPS時鐘信號接口型式或精度要求相差較大時,可各自配置GPS時鐘,這樣一可減少專業間的相互牽制,二可使各系統時鐘同步方案更易實現。另外,當系統之間相距較遠(例如化水處理車間、脫硫車間遠離集控樓)時,為減少時鐘信號長距離傳送時所受的電磁干擾,也可就地單設GPS時鐘。分設GPS時鐘也有利于減小時鐘故障所造成的影響。
(3)IRIG-B碼可靠性高、接口規范,如時鐘同步接口可選時,可優先采用。但要注意的是,IRIG-B只是B類編碼的總稱,具體按編碼是否調制、有無CF和SBS等又分成多種(如IRIG-B000等),故時鐘接收側應配置相應的解碼卡,否則無法達到準確的時鐘同步。
(4)1PPS/1PPM脈沖并不傳送TOD信息,但其同步精度較高,故常用于SOE模件的時鐘同步。RS-232時間輸出雖然使用得較多,但因無標準格式,設計中應特別注意確認時鐘信號授、受雙方時鐘報文格式能否達成一致。
(5)火電廠內的控制和信息系統雖已互連,但因各系統的時鐘同步協議可能不盡相同,故仍需分別接入GPS時鐘信號。即使是通過網橋相連的機組DCS和公用DCS,如果時鐘同步信號在網絡中有較大的時延,也應考慮分別各自與GPS時鐘同步。
二、西門子TELEPERMXP時鐘同步方式
這里以西門子公司的TXP系統為例,看一下DCS內部及時鐘是如何同步的。
TXP的電廠總線是以CSMA/CD為基礎的以太網,在總線上有二個主時鐘:實時發送器(RTT)和一塊AS620和CP1430通訊/時鐘卡。正常情況下,RTT作為TXP系統的主時鐘,當其故約40s后,作為備用時鐘的CP1430將自動予以替代(實際上在ES680上可組態2塊)CP1430作為后備主時鐘)。
RTT可自由運行(free running),也可與外部GPS時鐘通過TTY接口(20mA電流回路)同步。與GPS時鐘的同步有串行報文(長32字節、9600波特、1個啟動位、8個數據位、2個停止位)和秒/分脈沖二種方式。
RTT在網絡層生成并發送主時鐘對時報文,每隔10s向電廠總線發送一次。RTT發送時間報文最多等待1ms。如在1ms之內無法將報文發到總線上,則取消本次時間報文的發送:如報文發送過程被中斷,則立即生成一個當前時間的報文。時鐘報文具有一個多播地址和特殊幀頭,日期為從1984.01.01至當天的天數,時間為從當天00:00:00,000h至當前的ms值,分辨率為10ms。
OM650從電廠總線上獲取時間報文。在OM650內,使用Unix功能將時間傳送給終端總線上的SU、OT等。通常由一個PU作為時間服務器,其他OM650設備登錄為是境客戶。
AS620的AP在啟動后,通過調用“同步”功能塊,自動與CP1430實現時鐘同步。然后CP1430每隔6s與AP對時。
TXP時鐘的精度如下:
從上述TXP時鐘同步方式及時鐘精度可以看出,TXP系統內各進鐘采用的是主從分級同步方式,即下級時鐘與上級時鐘同步,越是上一級的時鐘其精度越高。
三、時鐘及時鐘同步誤差
3.1 時鐘誤差
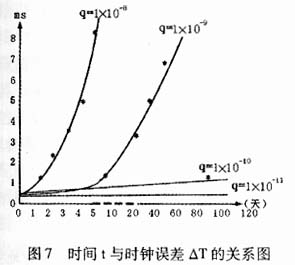
眾所周知,計算機的時鐘一般都采用石英晶體振蕩器。晶振體連續產生一定頻率的時鐘脈沖,計數器則對這些脈沖進行累計得到時間值。由于時鐘振蕩器的脈沖受環境溫度、勻載電容、激勵電平以及晶體老化等多種不穩定性因素的影響,故時鐘本身不可避免地存在著誤差。例如,某精度為±20ppm的時鐘,其每小時的誤差為:(1×60×60×1000ms)×(20/10.6)=72ms,一天的累計誤差可達1.73s;若其工作的環境溫度從額定25℃變為45℃,則還會增加±25ppm的額外誤差。可見,DCS中的時鐘若不經定期同步校準,其自由運行一段時間后的誤差可達到系統應用所無法忍受的程度。
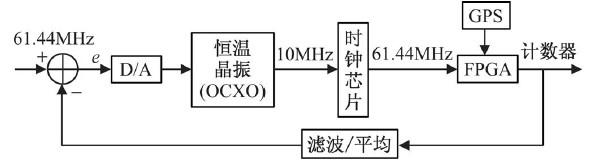
隨著晶振制造技術的發展,目前在要求高精度時鐘的應用中,已有各種高穩定性晶振體可供選用,如TCXO(溫度補償晶振)、VCXO(壓控晶振)、OCXO(恒溫晶振)等。
3.2 時鐘同步誤差
如果對類似于TXP的時鐘同步方式進行分析,不難發現時鐘在自上而下的同步過程中產生的DCS的絕對對時誤差可由以下三部分組成:
3.2.1 GPS時鐘與衛星發射的UTC(世界協調時)的誤差
這部分的誤差由GPS時鐘的精度所決定。對1PPS輸出,以脈沖前沿為準時沿,精度一般在幾十ns至1μs之間;對IRIG-B碼和RS-232串行輸出,如以中科院國家授時中心的地鐘產品為例,其同步精度以參考碼元前沿或起始相對于1PPS前沿的偏差計,分別達0.3μs和0.2ms。
3.2.2 DCS主時鐘與GPS時鐘的同步誤差
DCS網絡上的主時鐘與GPS時鐘通過“硬接線”方式進行同步。一般通過DCS某站點內的時鐘同步卡接受GPS時鐘輸出的標準時間編碼、硬件。例如,如在接受端對RS-232輸出的ASCII碼字節的發送延遲進行補償,或對IRIG-B編碼采用碼元載波周期計數或高頻銷相的解碼卡,則主時鐘與GPS時鐘的同步精度可達很高的精度。
3.2.3 DCS各站點主從時鐘的同步誤差
DCS主時鐘與各站點從時鐘通過網絡進行同步,其間存在著時鐘報文的發送時延、傳播時延、處理時延。表現在:(1)在主時鐘端生成和發送時間報文時,內核協議處理、操作系統對同步請求的調用開銷、將時間報文送至網絡通信接口的時間等;(2)在時間報文上網之前,還必須等待網絡空閑(對以太網),遇沖突還要重發;(3)時間報文上網后,需一定時間通過DCS網絡媒介從主時鐘端傳送到子時鐘端(電磁波在光纖中的傳播速度為2/3光速,對DCS局域網而言,傳播時延為幾百ns,可忽略不計);(4)在從時鐘端的網絡通信接口確認是時間報文后,接受報文、記錄報文到達時間、發出中斷請求、計算并校正從時鐘等也需要時間。這些時延或多或少地造成了DCS主從時鐘之間、從從時鐘之間的時間同步誤差。
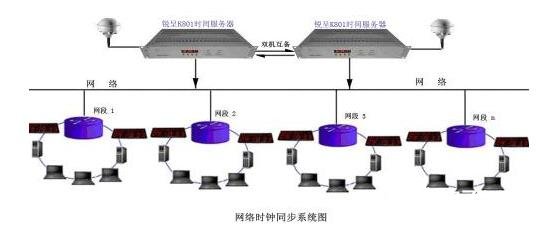
當然,不同網絡類型的DCS、不同的時鐘通信協議和同步算法,可使網絡對時的同步精度各不相同,上述分析只是基于一般原理上探討。事實上,隨著人們對網絡時鐘同步技術的不懈研究,多種復雜但又高效、高精確的時鐘同步協議和算法相繼出現并得到實際應用。例如,互聯網上廣為采用的網絡時間協議(Network Time Protocol,NTP)在DCS局域網上已能提供±1ms的對時精度(如GE的ICS分散控制系統),而基于IEEE1588的標準精確時間協議(Standard Precision Time Protocol,PTP)能使實時控制以太網上的主、從時鐘進行亞微秒級同步。
四、時鐘精度與SOE設計
雖然DCS的普通開關量掃描速率已達1ms,但為滿足SOE分辨率≤1ms的要求,很長一段時間內,人們都一直都遵循這樣的設計方法,即將所有SOE點置于一個控制器之下,將事件觸發開關量信號以硬接線接入SOE模件,其原因就在于不同控制器其時鐘存在著一定的誤差。關于這一點,西門子在描述其TXP系統的FUN B模件分散配置的工程實際情況來看,由于時鐘不能同步而無法做到1ms SOE分辯率,更有甚至因時鐘相差近百ms,造成SOE事件記錄順序的顛倒。
那么,如何既能滿足工程對于SOE分散設計的要求(如設置了公用DCS后,機組SOE與公用系SOE應分開,或希望進入控制器的MFT、ETS的跳閘信號無需經輸出再返至SOE模件就能用于SOE等),又不過分降低SOE分辨率呢?通過對DCS產品的分析不難發現,通常采用的辦法就是將控制器或SOE模件的時鐘直接與外部GPS時鐘信號同步。例如,在ABB Symphony中,SOEServerNode(一般設在公用DCS網上)的守時主模件(INTKM01)接受IRIG-B時間編碼,并將其產生的RS-485時鐘同步信號鏈接到各控制器(HCU)的SOE時間同步模件(LPD250A),其板載硬件計時器時鐘可外接1PPM同步脈沖,每分鐘自動清零一次;再如,MAX1000+PLUS的分散處理單元(DPU 4E)可與IRIG-B同步,使DPU的DI點可同時用做SOE,由于采用了1PPM或RS-485、IRIG-B硬接線時鐘“外同步”,避開了DCS時鐘經網絡同步目前精度還較差的問題,使各受控時鐘之間的偏差保持在較小的范圍內,故SOE點分散設計是可行的。
由此可見,在工程設計中應結合采用的DCS特點來確定SOE的設計方案。不可將1ms的開關量掃描速率或1ms的控制器(或SOE模件)時鐘相對誤差等同于1ms的SOE分辨率,從而簡單地將SOE點分散到系統各處。同時也應看到,SOE點“分散”同“集中”相比,雖然分辨率有所降低,但只要時鐘相對誤差很小(如與1ms關一個數量級),還是完全能滿足電廠事故分析實際需要的。
五、結束語
目前火電廠各控制系統已不再是各自獨立的信息孤島,大量的實時數據需在不同地方打上時戳,然后送至SIS、MIS,用于各種應用中。因此,在設計中應仔細考慮各種系統的時鐘同步方案和需達到的時鐘同步精度。
? ?在DCS設計中不僅要注意了解系統主、從時鐘的絕對對時精度,更應重視時鐘之間的相對誤差。因為如要將SOE點分散設計的同時又不過分降低事件分辨率,其關鍵就在于各時鐘的偏差應盡可能小。
? ?完全有理由相信,隨著網絡時鐘同步技術的不斷發展,通過網絡對系統各時鐘進行高精度的同步將變得十分平常。今后電廠各系統的對時準確性將大大提高,像SOE點分散設計這種基于高精確度時鐘的應用將會不斷出現。

















 工商網監
工商網監
評論