與GPS系統(tǒng)比較
覆蓋范圍:
北斗導(dǎo)航系統(tǒng)是覆蓋中國本土的區(qū)域導(dǎo)航系統(tǒng)。覆蓋范圍東經(jīng)約70°-140°,北緯5°-55°。GPS是覆蓋全球的全天候導(dǎo)航系統(tǒng),
2010-09-24 17:46:04 3869
3869 組合導(dǎo)航介紹總體介紹特點(diǎn)應(yīng)用領(lǐng)域介紹總體介紹組合導(dǎo)航是指綜合各種導(dǎo)航設(shè)備,由監(jiān)視器和計算機(jī)進(jìn)行控制的導(dǎo)航系統(tǒng)。大多數(shù)組合導(dǎo)航系統(tǒng)以慣導(dǎo)系統(tǒng)為主,其原因主要是由于慣性導(dǎo)航能夠提供比較多的導(dǎo)航參數(shù),還能
2022-01-07 06:44:53
隨著定位導(dǎo)航技術(shù)的飛速發(fā)展和日臻成熟,車載導(dǎo)航系統(tǒng)在相關(guān)領(lǐng)域得到了越來越廣泛的應(yīng)用。車載導(dǎo)航系統(tǒng)的功能是幫助用戶確定車輛位置并提供正確的操縱指示,因此定位的精確程度成為衡量一套系統(tǒng)性能優(yōu)劣的重要指標(biāo)。目前,常用的定位手段有 GPS衛(wèi)星定位、慣性導(dǎo)航定位和組合導(dǎo)航定位等。
2019-10-25 07:17:22
+慣性組合導(dǎo)航模塊SKG12UC, SKG12UC模組融合了北斗高精度衛(wèi)星定位和慣性導(dǎo)航技術(shù),為復(fù)雜的城市環(huán)境提供組合導(dǎo)航,適用于各種形態(tài)車載終端導(dǎo)航系統(tǒng),在高架遮擋、山間隧道、城市峽谷、地下停車場等
2019-07-15 04:35:55
GPS是什么?GPS模塊在便攜式導(dǎo)航系統(tǒng)中有什么應(yīng)用?
2021-05-14 06:26:52
申請理由:本人是嵌入式愛好者,學(xué)嵌入式開發(fā)已有三年經(jīng)歷,想開發(fā)一款gprs導(dǎo)航系統(tǒng),需要用到ok210系統(tǒng)板。項目描述:項目名稱:GPS導(dǎo)航系統(tǒng)本GPS導(dǎo)航系統(tǒng)所具有的功能:(1)導(dǎo)航引導(dǎo)和定位
2015-07-27 13:03:20
概率密度的逼近程度來緩解樣本退化問題,通過改進(jìn)再采樣實現(xiàn)過程來緩解樣本枯竭問題.把新算法應(yīng)用到INS/GPS組合導(dǎo)航系統(tǒng)中,仿真結(jié)果表明新算法的估計性能明顯優(yōu)于粒子濾波【關(guān)鍵詞】:粒子濾波;;最大期望算法
2010-04-24 09:04:09
什么是雙口RAM?基于FPGA的雙口RAM有哪些應(yīng)用?
2021-05-06 07:41:03
北京時間2003年5月25日零時34分,我國在西昌衛(wèi)星發(fā)射中心用"長征三號甲"運(yùn)載火箭,成功地將我國自行研制的第三顆"北斗一號"導(dǎo)航定位衛(wèi)星送入太空。這標(biāo)志著我國已建立了完善的自主衛(wèi)星導(dǎo)航系統(tǒng),對我國國民經(jīng)濟(jì)建設(shè)將起到積極作用。
2019-08-23 06:48:38
車載GPS/DR 組合導(dǎo)航系統(tǒng)是由哪些部分組成的?
2021-05-17 07:02:14
城市軌道車輛組合定位導(dǎo)航系統(tǒng)的研究與開發(fā)城市軌道交通的發(fā)展,特別是城市輕軌的發(fā)展,使得列車對新型導(dǎo)航定位系統(tǒng)的需求日益增加,因此本文正是結(jié)合這一需求進(jìn)行的研究。本系統(tǒng)主要采用GPS 實現(xiàn)列車的定位
2009-04-17 11:38:56
【作者】:秦鴻剛;劉京科;吳迪;【來源】:《電子設(shè)計工程》2010年02期【摘要】:為了在高速采集時不丟失數(shù)據(jù),在數(shù)據(jù)采集系統(tǒng)和CPU之間設(shè)置一個數(shù)據(jù)暫存區(qū)。介紹雙口RAM的存儲原理及其在數(shù)字系統(tǒng)中
2010-04-24 09:44:28
對于在室外環(huán)境工作的移動機(jī)器人通常使用慣導(dǎo)/衛(wèi)星組合導(dǎo)航方式。慣性導(dǎo)航系統(tǒng)具有完全自主、抗干擾強(qiáng)、隱蔽能力好和輸出參數(shù)全面等優(yōu)點(diǎn),但它的魯棒性極低,誤差會不斷隨時間累積發(fā)散。衛(wèi)星導(dǎo)航系統(tǒng)具有
2019-07-11 07:08:49
本文結(jié)合組合導(dǎo)航系統(tǒng)設(shè)計,介紹了利用又口RAM實現(xiàn)導(dǎo)航計算機(jī)主從機(jī)之間通信的一種實用、高效的系統(tǒng)設(shè)計方法。
2021-05-28 06:58:45
如何實現(xiàn)基于Linux的嵌入式車載導(dǎo)航系統(tǒng)的設(shè)計?
2021-12-27 07:52:50
地理整合性應(yīng)用與其因應(yīng)方案,也就是手持式、車載 GPS 全球衛(wèi)星導(dǎo)航系統(tǒng),便可解決對此人們急迫的需求性。基于 S3C2440A 微處理器和 Win CE 5.0 嵌入式操作系統(tǒng),設(shè)計了一套可靠且
2019-12-10 14:25:28
怎么實現(xiàn)基于51單片機(jī)&GPS的導(dǎo)航系統(tǒng)設(shè)計?
2021-09-30 07:40:24
本文介紹了以浮點(diǎn)DSPTMS320VC33為組合導(dǎo)航算法實現(xiàn)的核心處理器,利用TL16C554進(jìn)行通信口擴(kuò)展的GPS/DR組合導(dǎo)航系統(tǒng)的設(shè)計方案,給出了系統(tǒng)硬件的設(shè)計方法。
2021-05-12 06:28:56
怎么實現(xiàn)基于Linux的嵌入式車載導(dǎo)航系統(tǒng)的設(shè)計?
2021-05-18 06:12:50
怎么實現(xiàn)嵌入式GPS導(dǎo)航系統(tǒng)的設(shè)計?
2021-05-26 07:07:59
怎么選擇低成本汽車導(dǎo)航系統(tǒng)?
2021-05-13 06:31:44
為什么要設(shè)計一種基于STM32的視覺導(dǎo)航系統(tǒng)呢?怎樣去設(shè)計一種基于STM32的視覺導(dǎo)航系統(tǒng)呢?
2021-11-18 07:08:17
捷聯(lián)式慣性導(dǎo)航系統(tǒng)
2016-08-17 12:06:13
智能導(dǎo)航系統(tǒng)建設(shè)意義是什么?智能導(dǎo)航系統(tǒng)中的關(guān)鍵技術(shù)有哪些?智能導(dǎo)航系統(tǒng)在CDMA無線數(shù)據(jù)中的應(yīng)用是什么?
2021-05-27 06:57:38
到各自重點(diǎn)發(fā)展的智能交通系統(tǒng)當(dāng)中。本文主要介紹智能汽車的發(fā)展概況及簡要介紹智能汽車的導(dǎo)航系統(tǒng)原理,并分析智能汽車的發(fā)展前景以及其意義。 關(guān)鍵詞:智能汽車,發(fā)展概況,導(dǎo)航系統(tǒng),發(fā)展前景
2016-04-11 16:56:51
求GPS/INS組合導(dǎo)航系統(tǒng)原始導(dǎo)航數(shù)據(jù)仿真,加QQ1393177309詳聊,酬金200,感謝!
2014-07-12 12:58:09
技術(shù)要求;通過雙口RAM接收捷聯(lián)慣性導(dǎo)航系統(tǒng)IMU及系統(tǒng)實時解算等數(shù)據(jù)并以bin格式文件形式將其存儲在SD卡中,以時間為文件名保存,SD卡不小于16GB,數(shù)據(jù)存儲速率不小于50000字節(jié)/秒(數(shù)據(jù)頻率500HZ,每幀100字節(jié))有大神愿意做的聯(lián)系,名字q
2018-05-07 13:45:20
為什么要設(shè)計一個輪式小車慣性導(dǎo)航系統(tǒng)?輪式小車慣性導(dǎo)航系統(tǒng)的軟件裝置怎樣去設(shè)計?輪式小車慣性導(dǎo)航系統(tǒng)的硬件裝置怎樣去設(shè)計?如何去測試輪式小車慣性導(dǎo)航系統(tǒng)?
2021-04-19 11:35:46
的情況下可獲得優(yōu)于0.2°的2-D姿態(tài)測量精度。(3)INS與其他多種導(dǎo)航手段組合,尤其是GNSS/INS組合導(dǎo)航系統(tǒng) ,受到普遍關(guān)注。(4)地面車輛導(dǎo)航等民用市場發(fā)展迅速,價格低廉的一體化、小型化
2020-06-13 08:00:00
基于ARM的GPS/DR導(dǎo)航系統(tǒng)的硬件設(shè)計基于ARM的GPS/DR導(dǎo)航系統(tǒng)的軟件設(shè)計
2021-05-17 07:25:16
車載GPS/DR組合導(dǎo)航系統(tǒng)是由哪些部分組成的?基于DSP的車載GPS/DR組合導(dǎo)航系統(tǒng)的設(shè)計
2021-05-12 06:56:21
車載定位定向導(dǎo)航系統(tǒng)是由哪些部分組成的?怎樣去設(shè)計車載定位定向導(dǎo)航系統(tǒng)?
2021-05-13 06:46:43
【作者】:白俊卿;衛(wèi)育新;【來源】:《電子設(shè)計工程》2010年02期【摘要】:從工程實用和維護(hù)的角度出發(fā),提出一種針對于車載組合導(dǎo)航系統(tǒng)的在線標(biāo)定算法。該算法使用卡爾曼濾波作為估計工具,通過趨于一般
2010-04-24 09:31:29
針對組合導(dǎo)航系統(tǒng)在數(shù)據(jù)處理時存在的計算量大和故障數(shù)據(jù)相互污染的問題,提出了一種基于信息融合的導(dǎo)航參數(shù)最優(yōu)估計濾波方法。文中首先介紹了信息融合的基本原理、關(guān)鍵技術(shù)
2009-07-10 09:42:32 36
36 本文利用微型慣性測量元件和 GPS-OEM 板,以ARM 處理器為核心,設(shè)計了一種低成本、輕小型的嵌入式GPS/SINS 組合導(dǎo)航系統(tǒng)。文中介紹了捷聯(lián)慣導(dǎo)的原理和初始對準(zhǔn),給出了采用卡爾曼
2009-08-10 08:36:5845 本文提出了基于無復(fù)位聯(lián)邦卡爾曼濾波的信息融合算法,建立了慣性/衛(wèi)星/天文組合導(dǎo)航系統(tǒng)的誤差模型,并進(jìn)行了計算機(jī)仿真。仿真結(jié)果表明,該算法具有較強(qiáng)的容錯性。關(guān)鍵
2009-08-18 08:54:2021 對慣性導(dǎo)航系統(tǒng)、北斗雙星定位系統(tǒng)兩者的組合進(jìn)行了研究。建立了慣性/北斗雙星組合導(dǎo)航系統(tǒng)的數(shù)學(xué)模型,針對雙星系統(tǒng)噪聲特性難于統(tǒng)計的特點(diǎn)設(shè)計了可實時估計量測噪聲的自
2009-12-16 12:46:1339 本文設(shè)計了一個基于融合-重置結(jié)構(gòu)的聯(lián)邦濾波器,應(yīng)用于船舶組合導(dǎo)航系統(tǒng)。與傳統(tǒng)的集中式濾波器相比,聯(lián)邦濾波器結(jié)構(gòu)簡單,計算量少,容錯性強(qiáng)。仿真結(jié)果表明,該聯(lián)邦濾
2009-12-30 17:39:5210 從工程實用和維護(hù)的角度出發(fā),提出一種針對于車載組合導(dǎo)航系統(tǒng)的在線標(biāo)定算法。該算法使用卡爾曼濾波作為估計工具,通過趨于一般運(yùn)動狀態(tài)的路徑設(shè)計對待標(biāo)定的誤差項
2010-02-11 12:11:5411 根據(jù)車載導(dǎo)航系統(tǒng)發(fā)展現(xiàn)狀,提出了一種基于GPS和MIMU技術(shù)的低成本的、可用于市場推廣的組合導(dǎo)航系統(tǒng)方案。采用MIMU與GPS松散組合方式,以速度和位置作為觀測量設(shè)計了Kalman濾波器。
2010-07-23 10:35:3925 介紹了雙口RAM器件CY7C028的內(nèi)部結(jié)構(gòu)及工作原理,詳細(xì)討論了CY7C028在INS/GPS組合導(dǎo)航系統(tǒng)中的具體應(yīng)用,給出了CY7C028與TMS320F240和TMS320VC33之間的接口電路,并對CY7C028的分區(qū)處理進(jìn)行了
2010-11-13 17:31:5944 基于32位系統(tǒng)的車載多媒體導(dǎo)航系統(tǒng)設(shè)計
車載多媒體導(dǎo)航系統(tǒng),是在嵌入安裝在汽車環(huán)境使用的多媒體系統(tǒng)、導(dǎo)航系統(tǒng)。相對于手持式的個人導(dǎo)航產(chǎn)品(PND),車載多媒體導(dǎo)
2008-08-20 10:06:02577 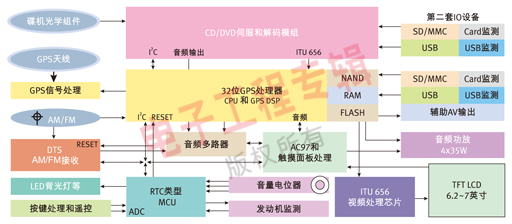
基于DSP的車載GPS/DR組合導(dǎo)航系統(tǒng)硬件設(shè)計
針對低成本組合導(dǎo)航技術(shù)發(fā)展的需要,結(jié)合主要傳感器特點(diǎn),本文介紹了以浮點(diǎn)DSPTMS320VC33為組合導(dǎo)航算法實現(xiàn)的核心處理
2010-03-05 11:33:541743 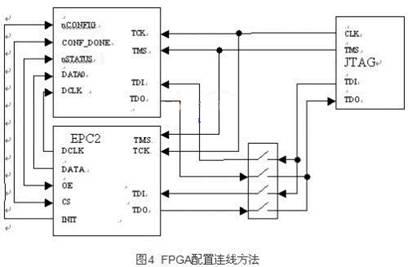
GPS導(dǎo)航系統(tǒng),GPS導(dǎo)航系統(tǒng)是什么意思
GPS百科名片GPS 是英文Global Positioning System(全球定位系統(tǒng))的簡稱,而其中文簡稱為“球位系”
2010-03-10 11:48:158926 什么是汽車的導(dǎo)航系統(tǒng)
汽車導(dǎo)航系統(tǒng)
GPS是以全球24顆定位人造衛(wèi)星做基礎(chǔ),向全球各地全天候地提供三維位置
2010-03-12 09:28:44582 什么是汽車電子導(dǎo)航系統(tǒng)
2010-03-17 13:41:201761 在眾多組合導(dǎo)般系統(tǒng)中,INS/GPS組合導(dǎo)航系統(tǒng)更是發(fā)展迅速,在軍用和民用領(lǐng)域均已獲得廣泛應(yīng)用,而且愈來愈受到重視。就INS/GPS組合導(dǎo)航系統(tǒng)而言,除了要完成大量的導(dǎo)航解
2010-09-01 10:54:593589 
在慣導(dǎo)/星光(INS/CNS)組合導(dǎo)航中,由于集中卡爾曼濾波存在對系統(tǒng)模型和噪聲統(tǒng)計特性依賴性等缺點(diǎn),將H濾波方法理論應(yīng)用其中。給出了H濾波的濾波方程,定性討論了kalman濾波和H濾波的關(guān)系,通過在INS/CNS組合導(dǎo)航系統(tǒng)中的實際應(yīng)用進(jìn)一步從精度和魯棒性對兩
2011-01-15 16:16:0313 電子發(fā)燒友提供了基于GPS的小型組合 導(dǎo)航系統(tǒng) 設(shè)計。本文提出了一種利用微小型慣性測量單元(MIMU)、全球定位系統(tǒng)(GPS)以及三軸磁強(qiáng)計(TAM)所構(gòu)成的小型組合導(dǎo)航系統(tǒng)設(shè)計方案.分別介紹
2011-07-08 11:45:2558 設(shè)計并實現(xiàn)了基于ARM 和DSP 的SINS/ GPS 組合導(dǎo)航系統(tǒng); 該系統(tǒng)采用DSP 作為導(dǎo)航解算計算機(jī), 完成導(dǎo)航數(shù)據(jù)的快速的融合與解算處理; 采用ARM 處理器作為上位機(jī), 完成導(dǎo)航系統(tǒng)的數(shù)據(jù)存儲、顯
2011-09-13 15:08:36180 為減小里程儀刻度因子誤差對組合導(dǎo)航精度的影響,分析了安裝誤差以及輪胎內(nèi)外溫度與里程儀刻度因子的關(guān)系,提出組合導(dǎo)航系統(tǒng)中里程儀快速標(biāo)定法,推導(dǎo)出組合導(dǎo)航系統(tǒng)卡爾曼濾
2011-10-25 16:14:5136 文中針對水下自主航行器提出了一種新型的基于捷聯(lián)慣導(dǎo)(SINS)和GPS的組合導(dǎo)航系統(tǒng)設(shè)計方案。該方案以捷聯(lián)慣導(dǎo)作為主系統(tǒng),同時利用GPS重調(diào)捷聯(lián)慣導(dǎo)系統(tǒng),建立了該組合導(dǎo)航系統(tǒng)的
2013-08-20 11:33:2432 MIMU_GPS組合導(dǎo)航系統(tǒng)小型化設(shè)計MIMU_GPS組合導(dǎo)航系統(tǒng)小型化設(shè)計
2015-11-19 14:37:497 基于可觀性因子的MINS_GPS緊組合導(dǎo)航系統(tǒng)設(shè)計_王翠
2017-03-16 08:00:001 基于Cortex_M4的多傳感器組合導(dǎo)航系統(tǒng)設(shè)計_楊歡
2017-03-19 11:41:231 隨著計算機(jī)與自動控制技術(shù)的發(fā)展,實時系統(tǒng)廣泛地應(yīng)用于航空、航天、航海等領(lǐng)域。實時調(diào)度是實時系統(tǒng)核心問題之一、因而成為現(xiàn)代工業(yè)、軍事等領(lǐng)域的研究熱點(diǎn)。組合導(dǎo)航系統(tǒng)具有導(dǎo)航精度高、可靠性好、小型化等特點(diǎn)
2017-09-01 16:56:598 基于ARM的移動機(jī)器人組合導(dǎo)航系統(tǒng)設(shè)計與實現(xiàn)
2017-09-25 13:38:055 )是常用的車輛定位技術(shù),但方向傳感器隨時間積累誤差較大,不能單獨(dú)、長時間地使用。采用組合導(dǎo)航系統(tǒng)能夠利用GPS系統(tǒng)提供的位置和速度信息對DR系統(tǒng)的誤差進(jìn)行實時的校正和補(bǔ)償;當(dāng)GPS信號失鎖時,又可通過DR系統(tǒng)完成航位推算,提高了組合導(dǎo)航系統(tǒng)的可靠
2017-10-23 11:30:591 針對低成本組合導(dǎo)航技術(shù)發(fā)展的需要,結(jié)合主要傳感器特點(diǎn),本文介紹了以浮點(diǎn)DSPTMS320VC33為組合導(dǎo)航算法實現(xiàn)的核心處理器,利用TL16C554進(jìn)行通信口擴(kuò)展的GPS/DR組合導(dǎo)航系統(tǒng)的設(shè)計方案
2017-10-31 15:28:560 基于用戶對衛(wèi)星導(dǎo)航系統(tǒng)的定位精度和實時性要求不斷提高的目的,文中在CPS/北斗組合導(dǎo)航系統(tǒng)的基礎(chǔ)上,采用基于高度角和方位角的快速選星算法,利用STK軟件和MATLAB仿真通過對比最佳幾何誤差因子
2017-11-02 16:14:542 項目背景及可行性分析 1.項目名稱、項目的主要內(nèi)容及目前的進(jìn)展情況 項目名稱: 基于FPGA的組合導(dǎo)航系統(tǒng) 項目的主要內(nèi)容及目前的進(jìn)展情況:本項目主要研究基于MicoBlaze導(dǎo)航處理器的組合導(dǎo)航
2017-11-22 11:35:3926 本文以低功耗MSP430F149為核心,設(shè)計了能夠同時實現(xiàn)衛(wèi)星導(dǎo)航(GNSS)接收機(jī)、慣性測量單元(IMU)、氣壓高度等導(dǎo)航信息的高速采集與高速合路傳輸,并進(jìn)行初步導(dǎo)航定位信息融合的導(dǎo)航系統(tǒng),即可為室外移動機(jī)器人提供直接的導(dǎo)航服務(wù),也可作為高精度組合導(dǎo)航系統(tǒng)的原始測量信息高速采集系統(tǒng)。
2018-04-06 09:54:002619 
在介紹組合導(dǎo)航模塊之前,先來了解下什么是組合導(dǎo)航技術(shù)。組合導(dǎo)航技術(shù)就是指采用兩種或兩種以上的非相似導(dǎo)航系統(tǒng)對同一信息做測量,從這些測量中計算出各導(dǎo)航系統(tǒng)的誤差并進(jìn)行校正。本文要介紹的就是指
2018-04-23 16:24:313962 進(jìn)行的航姿解算單元為卡爾曼濾波器。兩種或兩種以上的導(dǎo)航技術(shù)的組合,組合后的系統(tǒng)稱為組合導(dǎo)航系統(tǒng)。組合導(dǎo)航系統(tǒng)克服了單一導(dǎo)航系統(tǒng)的局限性,充分發(fā)揮了各自導(dǎo)航系統(tǒng)的獨(dú)特性,能夠利用多種信息源,構(gòu)成一種
2018-04-27 11:05:034098 介紹總體介紹組合導(dǎo)航是指綜合各種導(dǎo)航設(shè)備,由監(jiān)視器和計算機(jī)進(jìn)行控制的導(dǎo)航系統(tǒng)。大多數(shù)組合導(dǎo)航系統(tǒng)以慣導(dǎo)系統(tǒng)為主,其原因主要是由于慣性導(dǎo)航能夠提供比較多的導(dǎo)航參數(shù),還能夠提供全姿態(tài)信息參數(shù),這是其他
2021-12-31 19:26:5511 所謂的組合導(dǎo)航從定義上來看組合導(dǎo)航,用GPS、無線電導(dǎo)航、天文導(dǎo)航、衛(wèi)星導(dǎo)航等系統(tǒng)中的一個或幾個與慣導(dǎo)組合在一同,構(gòu)成的綜合導(dǎo)航系統(tǒng)。理想生活中,普通我們所說的組合導(dǎo)航系統(tǒng)大多數(shù)以慣導(dǎo)系統(tǒng)為主,慣導(dǎo)系統(tǒng)能提供比擬多的導(dǎo)航參數(shù),還可以提供全姿勢信息參數(shù),這是其他導(dǎo)航系統(tǒng)所不能比較的。
2022-02-17 15:58:461365 
電子發(fā)燒友網(wǎng)站提供《組合導(dǎo)航系統(tǒng)中里程儀快速標(biāo)定法.pdf》資料免費(fèi)下載
2023-10-26 09:07:200 電子發(fā)燒友網(wǎng)站提供《基于DSP/BIOS多線程的小型組合導(dǎo)航系統(tǒng)設(shè)計.pdf》資料免費(fèi)下載
2023-11-08 10:07:470
 電子發(fā)燒友App
電子發(fā)燒友App



















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論