`我們已經對單線激光雷達司空見慣,其旋轉線掃的測量方式導致造成壽命問題和價格居高不下。 因此,北醒研發了CE30,它是一款具有大視場角的固態激光雷達。它可同時輸出132°水平視場、9度垂直視場范圍內
2018-01-11 09:21:13
想了解行業國內做固態激光雷達的廠家,激光雷達里面是怎么樣的啊
2021-01-17 15:29:39
了概念階段,發展到了對各項技術的積極研究當中。而其中的某些技術,已經成為科技公司和汽車企業都表示“必須拿下”的關鍵所在,比如激光雷達。激光雷達有多重要?顧名思義,激光雷達就是以發射激光束探測目標的位置
2017-10-20 15:49:06
應用如果從體制上劃分,主要有直接探測激光雷達和相干探測激光雷達。實際上,目前我們提到的,包括自動駕駛、機器人、測繪用到的激光雷達,基本上屬于這種直接探測類型的激光雷達。有比較特殊的,比如測風、測速之類
2017-09-19 15:51:15
激光雷達是以發射激光束探測目標的位置、速度等特征量的雷達系統。從工作原理上講,與微波雷達沒有根本的區別:向目標發射探測信號(激光束),然后將接收到的從目標反射回來的信號(目標回波)與發射信號進行比較
2017-10-18 17:18:24
認為是 L3 級及以上自動駕駛必備傳感器。激光雷達兼具測距遠、角度 分辨率優、受環境光照影響小的特點,且無需深度學習算法,可直接獲得物體的距離和 方位信息。這些相較于其他傳感器的優勢,可顯著提升自動駕駛
2021-03-18 11:14:17
傳感器的融合,包括定位、路徑規劃、決策控制和改車等等。他們做的技術點非常多,無法聚焦,這導致他們被迫拉長戰線。所以在今年 4 月,我們針對激光雷達的解決方案提出了普爾米修斯計劃。我們希望這個計劃的本質
2017-09-08 17:24:48
接收器,接收端通過光電探測器形成信號接收,經過信號處理得到目標的距離、速度等信息或實現三維成像。激光雷達主要包括激光發射部分、掃描系統、激光接受部分和信息處理部分,結構較為復雜。從激光雷達的工作來看,主要分成四大部分:1)激光發射部分:激勵源周期性地驅動激光器,發射激光脈沖,激光調制器通過光束
2021-09-13 06:30:11
`激光雷達行業非常廣闊,每個細分方向都可以大有所為。就單線激光雷達而言,致力于解決好機器人的自主定位導航能力,能突破的道路只有一條:以實用性和可靠性作為第一考慮,而非一味的去追求參數。 那么作為一款
2018-02-07 13:40:27
`最近突然對機器人距離探測設備感興趣就打算著手做個激光雷達玩玩。。。。可以在設計方案的時候發現角度信息很難解決。多以想看看大家有沒有做過這方面的。幫忙想下。。。。如果哪位土豪家里有掃地機器人可以拆下,,,,,給大家介紹下,,,哈哈哈。。。。哪位大神如果做過,,,能不能幫幫偶。。。`
2016-04-16 17:45:28
差值的正負就可以確定。這種方法系統結構簡單,測量精度有限,只能用于反射激光較強的硬目標。 另一類測速方法是利用多普勒頻移。多普勒頻移是指目標與激光雷達之間存在相對速度時,接收回波信號的頻率與發射信號
2020-07-14 07:56:45
是理性的,它有研發成本,而這是固定成本,只能靠量產去攤薄。現階段激光雷達需求不多,這讓成本難以降低。另一塊是邊際成本,它有很多組成,其中最重要的是BOM(物料清單)成本。這是一個技術方向問題,軟件開發
2017-10-16 16:31:32
描述此激光雷達(光距離和范圍探測)參考設計展示了一款低側納秒 (ns) 級 GaN 柵極驅動器 LMG1020,該驅動器能夠驅動 FET 產生功率超過 100W 的 1ns 激光光脈沖。主要特色電路
2018-10-17 15:38:45
還有很多很 #神奇# 的應用 下面,讓我帶你進入五彩斑斕的激光雷達應用世界。激光雷達應用之 多點觸摸 怎么樣是不是顛覆了一些對激光雷達的傳統印象? 這些五彩斑斕的應用可以統稱為【多點觸摸】,技術原理就是
2018-05-11 15:33:44
上對地面成像,其分辨率足以能夠看到地面上的車輛。雖然這些系統的市場需求更小,且成本更高,但其發展將繼續降低傳感器技術的整體成本。挑戰由于激光雷達基于對激光脈沖返回傳感器所需時間的測量,因此高反射率的表面
2017-09-26 14:30:16
自制低成本3D激光掃描測距儀(3D激光雷達)
2021-03-04 10:51:54
自制低成本3d激光掃描測距儀激光雷達
2020-05-27 16:23:12
是激光雷達+SLAM的定位導航技術。 SLAM表示在不具備周圍環境信息的前提下,讓移動機器人在運動過程中根據自身攜帶的傳感器和對周圍環境的感知進行自身定位,同時增量式構建周圍環境地圖。SLAM可以提高
2018-11-09 15:59:01
有道友能介紹介紹EAI激光雷達嗎?
2020-12-31 17:48:20
FMCW激光雷達與dTOF激光雷達的區別在哪?
2021-07-23 13:22:37
1.測污激光雷達的原理 激光雷達的一個重要應用領域是大氣探測,大氣探測是利用各種探測手段對大氣中的物理過程和物理現象及氣象要素等進行觀測、探測并使用不同的載體記錄下來。大氣探測所獲取的氣象記錄
2016-05-23 14:44:42
TOF 方案激光雷達是激光雷達新一代技術方案,本產品解決了如市場三角測試法等產品組裝問題難,價格成本高等問題,目前提供面陣及單光子技術,基于COM產品。集成了SPAD,TDC,DSP,RAM
2019-06-07 00:03:35
STM32 Cube MX學習筆記——TOF 高速單線激光雷達 L10_串口中斷通信1. TOF 高速單線激光雷達 L102. STM32 Cube MX配置代碼配置1. TOF 高速單線激光雷達
2022-03-02 07:19:03
``激光雷達行業非常廣闊,每個細分方向都可以大有所為。就單線激光雷達而言,致力于解決好機器人的自主定位導航能力,能突破的道路只有一條:以實用性和可靠性作為第一考慮,而非一味的去追求參數。 那么作為
2018-02-02 14:06:27
,甚至前車的下方空間進行探測,為視覺系統提供更豐富的數據。
激光雷達被認為是 L3 級及以上自動駕駛必備傳感器。激光雷達兼具測距遠、角度分辨率優、受環境光照影響小的特點,且無需深度學習算法,可直接
2023-09-19 13:35:01
(垂直、水平)分辨率受到二維探測器像素尺寸的限制。 然而,閃光激光雷達的主要缺點是回波光子數量:一旦距離超過數十米,返回光的數量就太少,無法進行可靠的探測。如果不是直接用光覆蓋所有探測環境而是采用結構
2018-09-10 14:10:45
,雨霧的回波信號Echo1越強,因此一般雨霧只會形成一次可以探測到的回波信號,并非雨霧環境下全程都有回波信號。如下圖:搭建簡易測試場景對多次回波技術的效果進行驗證,實驗中使用三角架支撐TF03激光雷達
2020-09-24 14:17:56
批量出貨和廣泛應用于各類盲區檢測和障礙物探測的場景,它內置的避障算法的省心設計讓它在現場吸引了更多客戶。同樣是固態激光雷達,CE30-A主要面向的是僅用于判斷目標區域是否有行人或者物體入侵,或者行駛路徑
2018-01-25 09:38:47
出貨和廣泛應用于各類盲區檢測和障礙物探測的場景,它內置的避障算法的省心設計讓它在現場吸引了更多客戶。同樣是固態激光雷達,CE30-A主要面向的是僅用于判斷目標區域是否有行人或者物體入侵,或者行駛路徑
2018-01-26 09:19:09
批量出貨和廣泛應用于各類盲區檢測和障礙物探測的場景,它內置的避障算法的省心設計讓它在現場吸引了更多客戶。同樣是固態激光雷達,CE30-A主要面向的是僅用于判斷目標區域是否有行人或者物體入侵,或者行駛路徑
2018-01-25 09:36:04
`我們已經對單線激光雷達司空見慣,其旋轉線掃的測量方式導致造成壽命問題和價格居高不下。 因此,北醒研發了CE30,它是一款具有大視場角的固態激光雷達。它可同時輸出132°水平視場、9度垂直視場范圍內
2018-01-04 10:18:39
批量出貨和廣泛應用于各類盲區檢測和障礙物探測的場景,它內置的避障算法的省心設計讓它在現場吸引了更多客戶。同樣是固態激光雷達,CE30-A主要面向的是僅用于判斷目標區域是否有行人或者物體入侵,或者行駛路徑
2018-01-25 09:41:33
跪求基于載波激光雷達的水下目標探測技術的資料,要搞畢業論文。
2011-02-24 21:27:42
脈沖寬度為10 ns,并初步探討了影響實驗結果的幾種因素,提出將激光雷達光譜探測技術與太赫茲時域光譜技術相結合,并采用現代模式識別、信號處理技術是生物化學戰劑爆炸物實時光譜檢測技術的發展趨勢。【關鍵詞
2010-04-23 11:32:54
1、概述由于課題要求,需要設計一款適合于果園應用的激光雷達。因此采用單線掃描激光雷達和角度傳感器來設計能采集二維數據的激光雷達。關于數據的轉化的理論,我們可以查閱相關文獻。在此,只講基本的構造和程序
2021-11-12 08:15:02
本文檔的主要內容詳細介紹的是小米的2D激光雷達拆解圖和講解。
2023-09-22 08:07:45
單線激光雷達特點:結構簡單、掃描速度快、分辨率高、可靠性高、成本低。單線激光雷達實際上就是一個高同頻激光脈沖掃描儀,加上一個一維旋轉掃描。單線激光雷達雖然原理簡單但是可以有效、高頻的測試物體的距離
2017-09-25 11:30:10
,實現自主避障和導航。在這款盲人拐杖里,斯坦福的學生團隊加入了以下傳感器,用來協助盲人拐杖的運行:激光雷達:幫助盲人探測周圍物體的形狀和環境GPS:在室外的時候可以知道具體的位置IMU:知道盲人走路
2021-11-12 14:12:43
開發的全自動駕駛交通工具都依賴激光探測和測距技術(激光雷達)來感知世界并繪制地圖。這些地圖為無人駕駛汽車提供重要信息,利用其傳感系統和計算系統重點關注汽車、行人和自行車等障礙物的信息。然而,激光雷達
2017-10-23 17:51:41
圖2:安防激光雷達、攝像頭、報警器多手段協同激光雷達+安防監控優勢近年來,激光雷達技術飛速發展,從簡單的激光測距技術,逐步發展出激光跟蹤、激光測速、激光掃描成像、激光多普勒成像等技術。其工作環境也從
2020-02-29 17:03:44
幫助無人駕駛汽車獲取所在環境的三維位置信息,確定物體的位置、大小、外部形貌甚至材質等信息,以“精準”、“快速”、“高效作業”的空間探測能力成為無人駕駛領域不可或缺的存在。 無人駕駛激光雷達三維成像
2019-02-15 15:12:28
、甚至形狀等參數。激光的頻率很高,波長是納米級的,所以激光雷達可以獲得極高的角度、距離和速度分辨率。距離和速度分辨率高,意味著可以利用多譜勒成像技術來獲得目標的清晰圖像,這是激光雷達的一大優勢。但是
2019-09-19 09:05:02
,然而其劣勢在于對靜止物體如隔離帶的探測較弱且目前技術落地成本高昂。由于激光雷達可廣泛應用于ADAS系統,例如自適應巡航控制(ACC)、前車碰撞警示(FCW)及自動緊急制動(AEB),因此吸引了不少具有
2017-09-06 11:36:58
,是內部無機械旋轉部件的新型激光雷達。固態激光雷達不僅具有更高的探測速度(每秒20-100Hz的探測速度),同時可以保證更高的可靠性和穩定性,還可以省去機械旋轉激光雷達的人工調試成本,量產價格也就大幅
2017-12-07 14:47:45
iphone12這個亮點不在5G上面,畢竟國內的一些廠商早就已配備,也不在顏色,重點在于配備了一顆激光雷達!先說一下這個激光雷達帶來的用途,最直接的就是能夠快速精準對焦,即使在晚上也能夠很好實現
2021-07-22 09:12:51
; detection probabilities; false alarm rates激光雷達接收機的最小可探測功率是光電系統總體設計的一個參數。對于不同的光電系統,要精確計算出最小可探測光功率較困難,通常是
2009-05-15 01:20:13
想用單片機直接通過串口連接激光雷達,測障礙物,該激光雷達波特率230400,是arduino的極限115200的兩倍,所以要用STM32的芯片了。其數據手冊說的還是不清楚,固連接電腦的串口根據測得
2022-02-24 06:31:00
信號來獲取目標信息,所以還可實現全天候的工作。不過,激光雷達易受大氣條件以及工作環境的煙塵影響,要實現全天候的工作環境在目前來講還是最困難的事情。 #激光雷達的原理 實際上,激光雷達技術的前提是激光
2018-09-10 14:21:58
`這輛汽車對于科技愛好者絕不陌生,這就是谷歌研發的無人駕駛汽車。在行駛過程中,無人車需要感知周圍環境,但無法像人一樣用眼睛完成,這一切就要依靠車頂安裝的激光雷達。該裝置可檢測周圍障礙物,并及時反饋
2018-09-10 16:32:46
請問激光雷達和激光掃描儀的具體區別在哪兒?
2022-05-13 11:05:19
激光雷達是如何產生的?激光雷達在自動駕駛領域有什么作用?
2021-06-17 07:31:54
勺科技只用不到一年時間就完成了FMCW激光雷達的路測和樣機推廣。簡單介紹一下無人駕駛的技術的發展歷程。第一代無人駕駛技術實際上是Mobileye開始的,主要是利用攝像頭和毫米波雷達,它主要是被特斯拉
2020-03-16 19:27:55
,價格要比激光雷達便宜,但由于探測精度的限制,對于工程師而言,毫米波雷達只能應用于簡單的場景中。 激光雷達的探測距離比攝像頭遠,能夠準確的獲取物體的三維信息,而且探測到的數據量遠超過毫米波雷達,魯棒性
2017-08-21 14:54:32
`歷經40余年的發展,激光雷達技術已從最初的激光測距技術,逐步發展了激光跟蹤、激光測速、激光掃描成像、激光多普勒成像等技術,因此出現了各種不同種類的激光雷達,被廣泛應用于各個領域,激光雷達在很多
2018-12-10 14:55:39
請問各位大咖,激光雷達的測量距離能到多少?
2022-10-05 03:18:49
激光雷達最早的定義是 LIDAR,英文為 Light Deteation and Ranging,中文意思是「光的探測和測距」。 其實更準確的一個定義是 LADAR:LAser Detection
2017-09-18 19:01:11 37
37 激光雷達最早的定義是 LIDAR,英文為 Light Deteation and Ranging,中文意思是「光的探測和測距」。 其實更準確的一個定義是 LADAR:LAser Detection
2017-09-24 09:52:1243 根據探測技術的不同,激光雷達可以分為直接探測型和相干探測型兩種。 其中直接探測型激光雷達采用脈沖振幅調制技術(AM),且不需要干涉儀。相干探測型激光 雷達可用外差干涉,零拍干涉或失調零拍干涉,相應
2017-12-11 18:56:27 8113
8113 激光雷達是以發射激光束探測目標的位置、速度等特征量的雷達系統。以下對中國激光雷達企業及其產品進行了介紹。國內以鐳神智能、思嵐科技等創業公司以及巨星科技、大族激光等上市公司為代表的企業也開始嘗試逐步進入車用激光雷達行業。
2017-12-14 15:41:4984497 雷達是一種利用電磁波探測目標位置的電子設備.電磁波其功能包括搜索目標和發現目標;測量其距離,速度,角位置等運動參數;測量目標反射率,散射截面和形狀等特征參數。 傳統的雷達是微波和毫米波波段的電磁波
2018-02-20 09:48:0010906 此前文章“自動駕駛技術之——LiDAR初解”中我們介紹了激光雷達的由來和歷史發展,對于激光雷達的基本工作原理,也做了簡單介紹。本文就汽車用激光雷達的分類,先做簡單介紹。
2018-08-31 10:13:3113396 據麥姆斯咨詢介紹,激光雷達(LiDAR)技術正在從科學和空間應用轉向大眾市場,在消費類和汽車領域找到了大量應用。非掃描型激光雷達已經在汽車中用于自主緊急制動(AEB)功能,探測范圍約為10米。
2018-12-05 09:47:054495 的激光雷達,目前技術比較成熟,但機械旋轉式激光雷達系統結構十分復雜,且各核心組件價格也都頗為昂貴,其中主要包括激光器、掃描器、光學組件、光電探測器、接收IC以及位置和導航器件等。由于硬件成本高,導致
2019-08-13 14:09:413048 激光雷達是實現服務機器人自主行走的核心傳感器,以其精度高、抗干擾能力強等優點成為機器人定位的首選方案。它是一種以發射激光束來探測目標位置的雷達系統。
2019-09-07 12:00:5411468 對于大多數用戶而言,測距范圍、掃描頻率、角分辨率、測量精度等參數是其衡量激光雷達性能好壞的重要指標,當然,在這些重要技術指標之外,實用性和可靠性也是衡量激光雷達性能的重中之重。 激光雷達技術參數
2020-02-03 10:51:223194 
據麥姆斯咨詢介紹,激光雷達(LiDAR)是一項使用激光實現測距并創建深度圖的技術,但給人以昂貴且笨重的印象。MEMS微鏡會如何幫助降低激光雷達成本?激光雷達如何實現物聯網解決方案?下文將給予相關
2020-11-09 14:25:084728 本書分六章介紹了激光雷達的基本原理與結構、相關的物理數學問題和關鍵技術等,內容包括激光雷達的理論基礎,激光的大氣傳輸特性探測概率和虛警概率等。 激光雷達方面的經典參考書,強烈推薦
2021-01-04 08:00:00259 蔚來的激光雷達專利,通過高重頻激光器的連接設計,使得激光雷達系統的探測分辨率和探測結果的準確度大幅增加。
2021-01-08 11:59:023811 繼上篇介紹了什么是激光雷達之后,希望讓大家了解下車載激光雷達行業主要廠商,通過眾多廠商和其主打產品,大家即可對激光雷達行業的狀態和技術路線有一個大概的認識。 國外激光雷達公司: Velodyne
2021-02-19 14:05:4812559 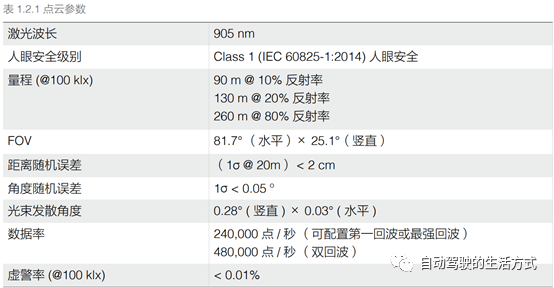
值得關注呢? 測距距離 激光雷達的主要作用便是距離測量,指的是傳感器能探測到物體的最遠距離,其測量的最大距離(量程)自然是其最核心的指標。大部分激光雷達都會直接以測量距離作為其主要指標。 掃描頻率 較高的掃描頻率可
2021-10-14 14:16:553481 激光雷達是集激光、全球定位系統(GPS)、和IMU(慣性測量裝置)三種技術于一身的系統,相比普通雷達,激光雷達具有分辨率高,隱蔽性好、抗干擾能力更強等優勢。隨著科技的不斷發展,激光雷達的應用越來越
2021-03-30 16:37:008079 
1、概述由于課題要求,需要設計一款適合于果園應用的激光雷達。因此采用單線掃描激光雷達和角度傳感器來設計能采集二維數據的激光雷達。關于數據的轉化的理論,我們可以查閱相關文獻。在此,只講基本的構造和程序
2021-11-06 20:21:01141 毫米波雷達是工作在毫米波波段(millimeter wave )探測的雷達。激光雷達是以發射激光束探測目標的位置、速度等特征量的雷達系統。
2022-02-06 13:20:0087169 激光雷達是什么? 激光雷達(英文:Lidar),激光雷達是集激光、全球定位系統(GPS)、和IMU(慣性測量裝置)三種技術于一身的系統,相比普通雷達,激光雷達具有分辨率高,隱蔽性好、抗干擾能力更強
2022-06-20 16:53:4122718 電子發燒友網站提供《激光雷達入侵探測器開源分享.zip》資料免費下載
2022-10-27 16:30:426 激光雷達的本質是一種以激光為輻射源的主動探測器,通過測距和測角來實現探測目的。激光雷達LiDAR(Light Detection and Ranging)是激光探測及測距系統的簡稱,另外也稱 LADAR(Laser Detection and Ranging)。
2022-10-27 11:53:208334 目前這些上車的激光雷達主要都是用于探測遠距離,放得高看得遠。我之前文章《智能駕駛要用多少個激光雷達?分別放在哪里?什么作用?》中寫到過另外一種激光雷達-flash激光雷達,他的細分市場正在迅速興起。
2022-11-30 09:22:25988 激光雷達的硬件模塊有哪些?
車載激光雷達的發展階段有哪些?
目前,車載激光雷達的物體探測方式有哪些?
2023-02-06 09:25:222779 激光雷達即激光探測及測距系統,是通過發射激光束來探測目標位置、速度等特征量的雷達系統。按掃描維度,激光雷達可分為一維激光雷達、二維激光雷達和三維激光雷達。
2023-05-10 09:58:335396 
針對激光雷達突破經典探測極限的需求,本文中研究了量子關聯測量和HOM干涉測量在激光雷達探測上的可能應用。
2023-05-11 14:49:54277 
激光發射功率越高,探測距離越遠。激光發射功率的提高主要取決于激光芯片的 光功率密度。若發射功率提高1倍,則激光雷達探測距離將提升19%。而激光芯片的發射功率是“激光芯片功率密度”和“發光面積”兩者
2023-06-29 17:25:00642 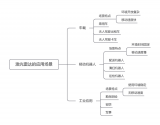
激光雷達在自動駕駛應用中主要用來探測道路上的障礙物信息,把數據和信號傳遞給自動駕駛的大腦,再做出相應的駕駛動作,但室外常見的干擾因素如雨、霧、雪、粉塵、高低溫等對激光雷達的識別造成了極大的影響。因此
2023-07-14 11:11:303320 跨導放大器)和探測器,如圖所示。其中除了發射和接收光學鏡頭外,都是電子部件。隨著半導體技術的快速演進,性能逐步提升的同時成本迅速降低。但是光學組件和旋轉機械則占具了激光雷達的大部分成本。 二、激光雷達的種類 目前市面上有不同種
2023-07-14 11:14:041161 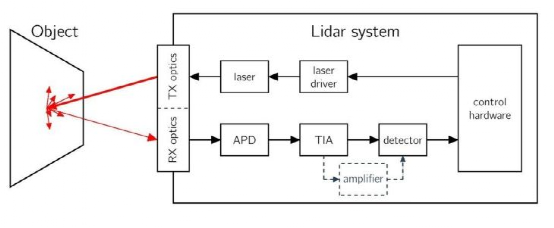
簡述激光雷達的結構原理分類及特點 TIM320激光雷達的工作原理? 激光雷達是一種高精度的探測裝置,可以在三維空間中進行高精度的距離測量和空間信息采集。激光雷達的主要結構包括光源、掃描系統、接收系統
2023-08-22 16:45:302038 激光測風雷達是一款小型、全自動、無環境電磁干擾的風廓線型相干多普勒激光雷達,采用多普勒外差法,根據空氣中顆粒物的激光后向散射回波的多普勒頻移測量風速和風向等參數,具有探測盲區小、精度高、體積小、重量輕等特點
2023-09-07 15:51:48629 
電子發燒友網站提供《先進激光雷達探測技術研究進展.pdf》資料免費下載
2023-10-31 11:10:490 單線激光雷達和多線激光雷達區別? 單線激光雷達和多線激光雷達是兩種常用的激光雷達技術。它們在激光的發射方式、數據采集、成像分辨率和應用場景等方面存在著很大的區別。 首先,單線激光雷達是指激光雷達
2023-12-07 15:48:331843 激光雷達是一種利用激光束來探測和測量目標物體的雷達技術。它具有測量距離遠、分辨率高、速度快、抗干擾能力強等優點,在國防、航天科技、地質勘探、智能駕駛等領域有著廣泛的應用。 一、激光雷達
2023-12-15 11:03:21396 所謂雷達,就是用電磁波探測目標的電子設備。激光雷達(LightDetectionAndRanging,簡稱"LiDAR"),顧名思義就是以激光來探測目標的雷達。
2023-12-18 17:18:13928 
華為激光雷達是一種常用的傳感器技術,可用于距離測量和感應。它的參數設置對于確保其性能和功能至關重要。在本文中,我們將詳細介紹華為激光雷達的參數設置以及其影響和應用。 首先,我們需要了解激光雷達
2024-01-19 14:17:12372 一、激光雷達LiDAR工作原理激光雷達LiDAR的全稱為LightDetectionandRanging激光探測和測距,又稱光學雷達。激光雷達的工作原理:對人畜無害的紅外光束LightPluses
2024-03-05 08:11:11182 
機載激光雷達是指安裝在飛行器(如飛機、直升機、無人機等)上的激光雷達系統,用于從空中對地面或其他目標進行測量、成像和監測。
2024-03-21 16:49:12232 
 電子發燒友App
電子發燒友App















 工商網監
工商網監
評論