 電子發燒友App
電子發燒友App


本系列文章為于振南老師的顛覆認知的“工業之眼”--毫米波雷達(MMWR)部分,本文內容為:?MMWR原理真巧妙,十步以外檢測風吹草動。
毫米波?也許你只在網上或新聞里有所耳聞,知道華為的5G基站使用了毫米波,或者知道特斯拉的自動駕駛有MMWR。其實前者是毫米波的通信應用,它使得通信帶寬得到質的飛躍,為所謂的“大上行業務”應用提供了支撐(實時機器視覺就是最典型的“大上行”應用)。不過,本章并不講毫米波的這種通信應用,而是側重于后者,即在雷達方面的應用。
2021年前后,我的硬件團隊一直在研發一個神奇的東西,就是太赫茲MMWR(THz MMWR)。應該說這項工作還是極具挑戰的。我團隊里有從英國名校留學回來的硬件工程師,精通高頻模擬電路設計和無線系統仿真;另有工程師,包括我在內精通數字信號處理和嵌入式;這期間甚至還有位高權重的大佬(不便透露實名)參與關鍵部分的研發。即使這樣,我們仍然感覺到了巨大的研發阻力。
太赫茲毫米雷達其實是MMWR的一個先進分支,或者說是新興概念,它象征著最激進的MMWR技術。太赫茲MMWR的諸多優異特性使其成為了相關行業的聚焦點。
什么?MMWR到底是什么?它到底有多神奇?振南不再啰嗦,直接來看本章的內容。
正文
3、MMWR原理真巧妙
前面的歷史和應用就花費了很大的篇幅。是時候展現真正硬貨的時候了。
3.1 測量距離
3.1.1 測距原理
MMWR最最基本的功能就是測距。很多的應用場景其實都是由測距引申出來的。有一定研發工程經驗的人就會知道,測距并不簡單,高精度測距就更難。常見的測距方案有超聲測距、激光測距,還有現在比較火的射頻測距,比如UWB和BT5.0(它們都是基于TOF方法)。UWB是什么?超帶寬,不要跑題。會有專門的章節去詳細講解UWB。
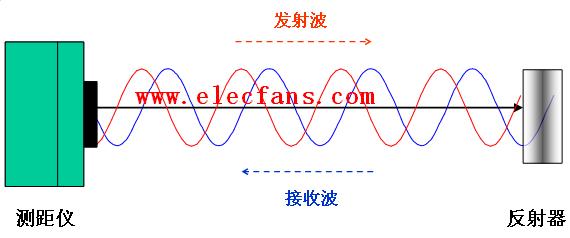
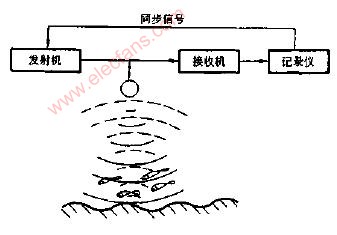
振南先給出雷達系統的基本工作原理圖,如圖18.16。
圖18.16 雷達系統的基本工作原理圖
雷達有發射天線和接收天線,它們分別負責電磁波的發射與接收(典型的廢話,毫無信息量)。很多人可能會認為一發一收,那就是計算一下收發延時,乘以光速就行了。你說的這個是新興的射頻測距的原理,但并不是雷達的測距原理。
前方高能,作好準備。
1、FMCW(調頻連續波)
FMCW(調頻連續波),是指頻率隨著時間而連續變化的電磁波信號,如圖18.17-8所示。
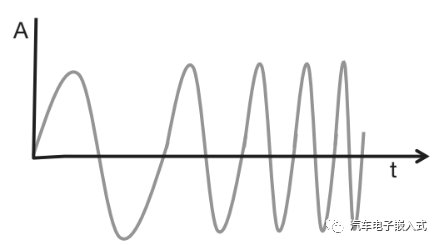
圖18.17 FMCW(調頻連續波)時域波形示意
圖18.18 線性調頻脈沖信號(以77GHz毫米波信號為例,帶寬是4GHz)
這里理解沒有問題吧?OK,我們繼續。
2、IF(中頻信號)
我們設想一下,如果雷達以這種波形發射信號,然后信號遇到障礙物也會以這個波形反射回來,不同在于這一去一回的兩個信號是有一定的延時差的,如圖18.19。
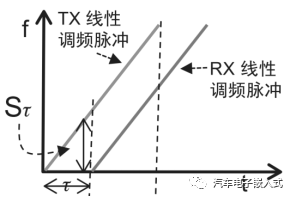
圖18.19 線性調頻脈沖發射與接收信號
此時,我們會發現因為這個延時差非常非常小(毫米波傳播速度是光速),所以這兩個信號會有一個重疊區域,即圖18.19中虛線畫出的部分。如果我們嘗試對這兩個信號作減法,我們會發現一個神奇的現象,如圖18.20。
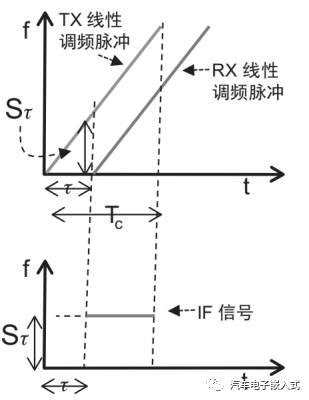
圖18.20 中頻IF信號的產生
對,我們會得到一個特定單一頻率的信號,我們稱之為IF,即中頻信號。OK,我們進一步來想:這個IF信號的頻率是由什么決定的?沒錯,兩個信號的延時差。而延時差是由什么決定的?聰明,毫米波發射天線與目標物體的距離。這樣是不是只要知道了IF信號的頻率,也就知道了其所對應的距離了?
如果你能夠理解這個,那恭喜你,你已經消化了MMWR的最基本原理。
“那IF信號應該是一個標準的正弦信號吧?”不是,實際的中頻信號比較復雜,振南翻出了一個實際的中頻信號給大家看一下,如圖18.21。
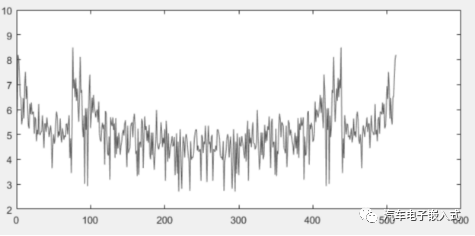
圖18.21 實際采集到的IF信號波形
實際情況下,目標不可能只有一個,而且還有各種噪聲,芯片內部信號泄露(和工藝相關),綜合各種因素最終得到這個IF信號。
“IF信號是兩個信號重疊部分的差值,那我在電路上用運算搭一個差分電路就行了?”那~,當然不是。如圖18.22所示。
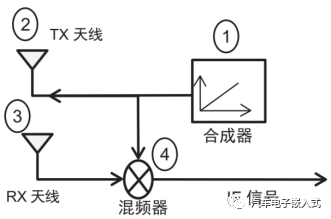
圖18.22 MMWR信號處理框圖
這兩個信號,唉,這么說太不專業了。其實這個FMCW信號有一個專門的名稱叫Chirp,很多時候人們把他翻譯成啁啾。Chirp信號及其回波通過混頻器,得到中頻信號。
從IF中提取頻率的方法,就不用多說了吧。大家都知道,額!還有人不知道,FFT(快速傅里葉變換)學習一下。
3、實戰測距
“振南,你到底有沒有真正實現過毫米波測距,別光講原理,拿出東西來給大家看看!”似乎有點不太友好哈,別著急,有貨!
振南專治各種不服,下面是振南基于瑞典的某MMWR品牌的芯片作的一些實驗。模塊實物如圖18.23。
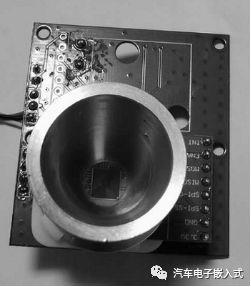

圖18.23 瑞典某品牌的MMWR模塊實物(帶波導)
如圖18.24-27。
?

圖18.24 單目標測距實驗(距離近)
?

圖18.25 單目標測距實驗(下距離遠)
?
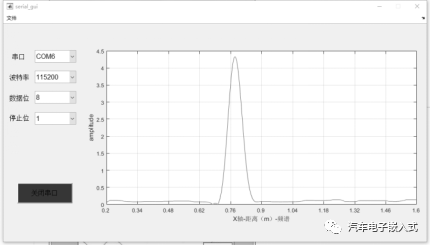
圖18.26 單目標測距實驗(距離近)對應FFT頻譜
?
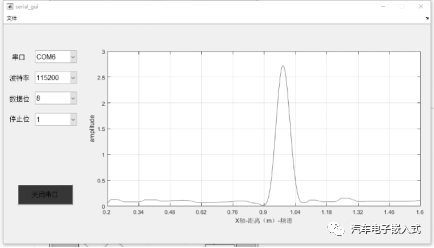
圖18.27 單目標測距實驗(距離遠)對應FFT頻譜
很明顯,距離的遠近造成了頻率的變化。
有人會問:“那測距的最大距離有多遠?10米、50米、100米?還有精度是多少?10mm?”嗯,這些與MMWR的一些關鍵參數相關。振南給大家仔細說一下。
3.1.2 測距的主要指標
1)最大測距范圍
要詳細地計算MMWR的測距范圍其實是一件比較復雜的事情。跟很多因素有關,振南不想堆公式,那樣會嚇退很多人。所以,振南嘗試采用宏觀認知的方式,讓大家理解測距范圍與什么有關。
首先,發射功率是一個重要因素。很顯然,發射功率越大,毫米波傳播的距離越遠。
但是我們可以試想一下,傳播越遠,那么回波的延時也就越大。但是Chirp是一定的寬度的,如果回波延時過大,可能導致其與Chirp信號沒有重疊區(實際上不太可能沒有重疊區,因為光速實在是太快了,而Chirp信號的寬度基本在微秒級,而MMWR一般的測距距離也就最多幾千米,所以一定會有重疊區),或者是重疊區寬度比較短(它導致IF信號比較短,這個問題是可能出現的),從而使得IF信號的采集比較困難。如圖18.28。
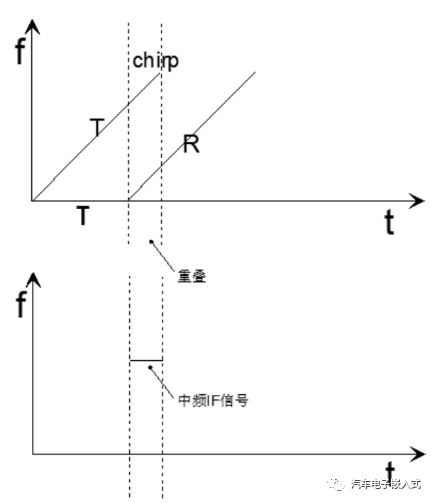
圖18.28 回波延時過大導致IF信號過短
IF信號短了,但是我們還需要采集到足夠的采樣點去作FFT,那就要求ADC的采樣率要足夠高。另一方面,IF信號不光短了,它的頻率還更高了。根據奈奎斯特采樣定理ADC采樣率要高于待檢頻率的2倍。你一定要明白,Chirp信號的頻率可是高達幾十GHz,甚至上百GHz(太赫茲)。IF信號的頻率少說也有幾MHz,ADC的采集率需要多高,就不言而喻了吧!
振南在實際調試過程中,測量距離30米左右,毫米波頻率是122GHz,中頻IF信號的頻率大約在幾百K到幾MHz。使用STM32F303的片上差分ADC進行采集,采樣率5MHz,最終效果是不錯的。如圖18.29-31。

圖18.29 MMWR測距實驗(左為實時FFT)
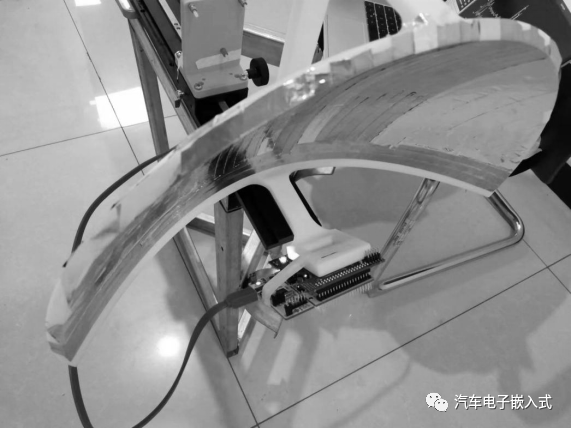
圖18.30 MMWR測距實驗(雷達加裝拋物面天線)
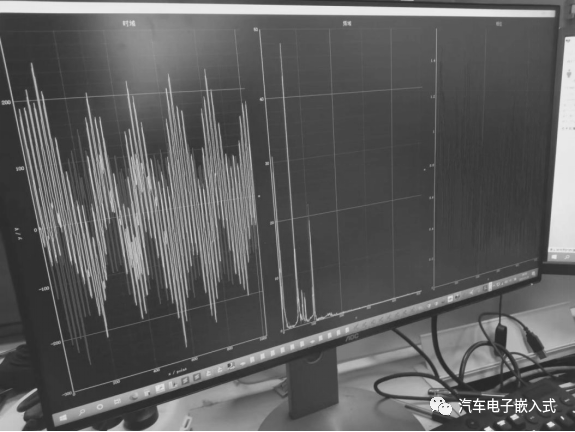
圖18.31 MMWR測距實驗(實時中頻信號與FFT)
“這個拋物面天線挺高端啊,能不能詳細講講?”別著急,不是不講,時候未到。
那有沒有辦法擴大測距范圍的同時,又不會對ADC提出太高的要求。畢竟我們還是要考慮成本的。大家可以想想…… OK,恭喜振南再次成為“冷場王”。(可能大家發現了,振南的寫書風格是力求通俗、詼諧幽默、有種網文的感覺,同時又喜歡自問自答,創造一種“假互動”的效果,這可能與我多年從事教程創作和講課有很大關系,只要你覺得易于接受、開心快樂就好)
“是不是可以把Chirp拉長一些,這樣IF信號也許能長一些,同時頻率也能低一些。”沒錯,我們可以減小Chirp的斜率,也就是頻率隨時間變化慢一些。如圖18.32。
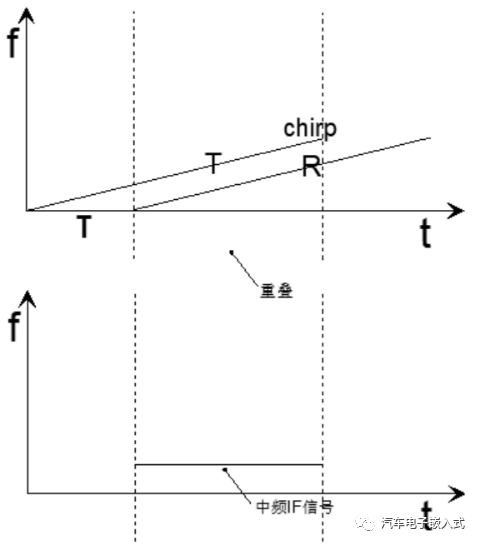
圖18.32 將Chirp斜率減小IF信號長度增加同時頻率降低
有一得必有一失!萬事都是這個道理。這樣作的代價是什么?對,降低了采樣率,也就是測量一次距離需要更多的時間。
所以,決定MMWR測距范圍的因素有1、發射功率 2、ADC的采樣率 3、Chirp信號的斜率。但是這是一種感官意識上的理解。“大家是否同意我放出計算公式?”……又是一陣冷場。那我就當是默認了,公式,上!
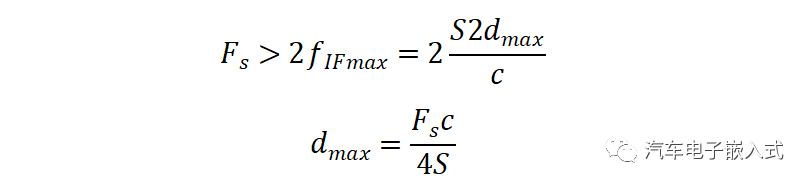
上式中Fs是ADC的采樣率 c是光速 S是Chirp斜率。所以,最大測量距離與ADC采樣率成正比,而與Chirp斜率成反比。(上式的解釋:2dmax是毫米波一去一回的路程,它除以光速即為回波延時,回波延時乘以斜率便是中頻IF信號的頻率,而ADC采樣率要大于2倍的信號頻率)所以,公式計算結果與我們的宏觀認知是一致的。
“那毫米波測距的精度怎么樣?這個又與什么有關?”其實所謂的精度,就是分辨率。
2)距離分辨率
通俗來說,我們將兩個物體放在一起,它們之間的距離多遠的時候,MMWR可以分辨出它是兩個物體。此時的這個距離就是分辨率。
我們仍然從宏觀意識上來理解這個東西。MMWR測距本質上是頻率到距離的一個對應關系。IF信號頻譜上的一個尖峰就代表相應的位置上有一個物體。如圖18.33。
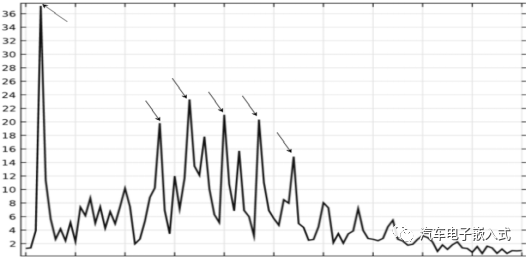
圖18.33 IF信號頻譜上的尖峰均代表相應位置有物體
順便說一下,通過圖18.33,大家應該也就明白了,MMWR可以同時探測多個物體的原因了(中頻IF是可能包含多個頻率成分的)。這就是MMWR的“多目標”特性。OK,我們知道FFT計算輸出的頻譜頻點是離散的,比如我們經常作的1024點或2048點的FFT,最終輸出的是0~511Hz或0~1023Hz各個整數頻點的功率譜。
什么?FFT是什么?額…… 好吧,我被你打敗了。先惡補一下FFT吧。
細節的讀者可能已經意識到一個問題了:“如果我把物體正好放在兩個頻點之間的位置上,那頻譜上這個物體會落在哪個頻點上呢?”答案是都有可能。我們發現,當一個物體在某一個頻點所對應的距離位置附近移動的時候,他在頻譜上的頻點并沒有變化。換句話說,如果兩個物體的距離小于兩個相臨頻點所對應的距離之差,那么我們在頻譜上是無法分辨出它們兩個的。(實際情況是,它們在頻譜上是同一個頻點,只不過這個頻點的功率值會高一些,因為它倆被看作同一個物體,表面積大了,回波強了)
請盡力理解上面的這段話。所以,MMWR測距的分辨率就是兩個頻點所對應的距離之差。這個距離之差,也就是可分辨的最小距離,有一個專門的名稱,叫Rangebin。比如最大測量測量距離是10米,采用2048點的FFT,那么它的Rangebin就是10/1024≈9.765mm,這就是所謂的測距精度。
“但是ZGZL的MMWR測量精度能達到0.01mm?這到底是怎么作到的?”要揭秘這個問題,請繼續往下看。
那距離分辨率與什么因素有關?“FFT的點數,更多點數的FFT可以把頻譜劃分得更細”沒錯。實際上我們會使用4096或8192,甚至更多點的FFT,當然這對ADC采樣率與DSP都提出了很高的要求(要對不長的IF信號采集足夠多的點,然后以足夠快的速度計算FFT)。但是只提升FFT是不夠的(FFT只是一個頻率分析工具),IF信號里要有足夠豐富、足夠細粒度的頻率成分。說白了,IF里都沒有這個頻率成分,你還搞啥呢?
所以,我們要讓IF信號可以容納更多的頻率(頻率容量,更準確的說叫“帶寬”)。但是IF信號是由Chirp與回波信號通過減法而生成的,因此擴大IF信號帶寬,根本上就是要擴大Chirp信號帶寬。如圖18.34。
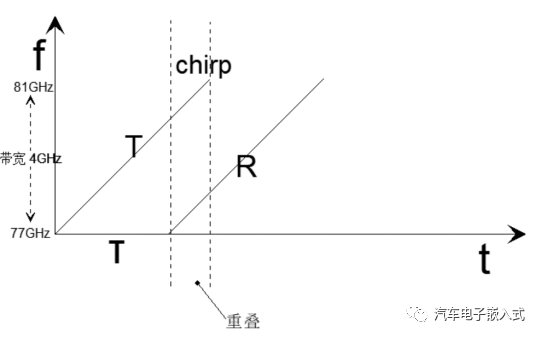
圖18.34 Chip的帶寬(以TI的77GHz毫米波為例)
我們平時說的24GHz、77GHz、122GHz毫米波,其實這些頻率都是它的FMCW的開始頻率。它們的帶寬一般是開始頻率的1-5%,比如24GHz的帶寬是250MHz、77GHz是4GHz,而122GHz是7GHz。(122GHz是現在比較先進的,被稱為太赫茲 THz,但是它還不是頻率最高的,最高的可以達到300GHz,帶寬為40GHz)
帶寬越大,IF信號中的頻率成分越豐富,我們使用更多點的FFT就可以提取出更細的頻率,這樣使得Rangebin不斷縮小,最終距離分辨率提以大幅提高。距離分辨率提高的意義是巨大的,它是精確測量與雷達成像的重要基礎。歐洲一些先進的毫米波廠商已經推出了300GHz的RFE芯片(雷達前端,它主要的是作用是產生Chirp,輸出中頻),來看看300GHz的RFE芯片什么樣子,如圖18.35。
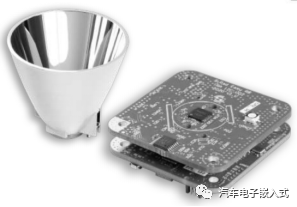
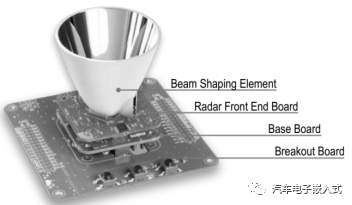
圖18.35 歐洲某公司的300GHzMMWRDemo板
“那個小喇叭是干啥的?”振南一開始也叫他“小喇叭”,后來被專業人事笑話,說那叫“波導”。OK,那就是叫“波導”。因為太赫茲,尤其是頻率高達300GHz的毫米波,很多特性已經接近光了。但是它卻擁有光所不具備的穿透和全天候能力。
關于測距的指標,除了最大距離和分辨率之外,還有開放角、采樣率。這些振南就不講了。毫米波其實是一個博大精深的東西,真要展開講的話,能專門出本書。這里僅介紹一些最基本的原理和常見的應用。
4、十步以外檢測風吹草動
4.1 速度測量
前面振南向大家介紹了MMWR測距的原理。精彩不!OK,現在又有人提問了“物體不可能不動,那MMWR能測速嗎?”來看一個東西,如圖18.36。
圖18.36 毫米波測速儀
嗯,毫米波測速儀。那就是說毫米波是可以用來測速的。其實原理很簡單,速度嘛,就是位移除以時間。我們對物體測量兩次距離,然后用距離差除以采樣時間,就是速度。示意圖我就不畫了。
在這樣一個測速方法的設定下,就會出現一些問題:兩次測距之間的間隔時間如何把握?太長可能會錯過物體,比如物體以非常快速度移動;太短可能根本測不出來速度,即速度為0,因為同一個Rangebin下的位移將會被無視(上面講過了,它們在頻譜上是同一個頻點)。最困難的情況是一個物體以極快的速度移動了很小的距離。這個時候,MMWR基本上就變成了“睜眼瞎”。
那該如何是好?我提示一下:FFT在分析頻率成分的時候,在結果中會輸出各頻點的功率,還有各頻點的相位!相位!相位!重要的事情說三遍。MMWR真正的高端應用基本上都是基于相位來實現的。相位可以為我們提供更多的有用信息。
我們以很小的間隔去進行兩次測距,也就是說依次發送兩個Chirp,如圖18.37。
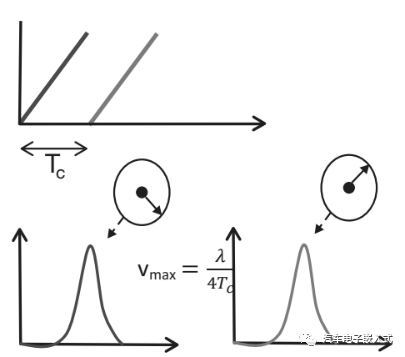
18.37 雙線性調頻脈沖速度測量
當然,這兩次測距都會落在同一個Rangebin上(也就是同一個頻點),但是它們的相位不同。我們通過相位的變化來計算這微小的位移。明白了嗎?這還不明白?那0.01mm的位移測試精度是怎么實現的!
相位的玄機已道破,一切好像都不需要講了。OK,本小節完結。
4.2 微位移檢測
大距離用Rangebin,小位移用相位。什么是小位移?生活中有哪些小位移?其實非常多,應該說滿目皆是。被風吹動的樹葉,跺一腳地面的顫悠,還有前面提到過的呼吸時的前胸起伏,這些都是微位移。為什么說滿目皆是呢,一切的振動都是微位移,而世界的本原就是振動和弦(參見加來道雄的《弦理論》)。
我直接上實際的實驗,請看圖18.38。
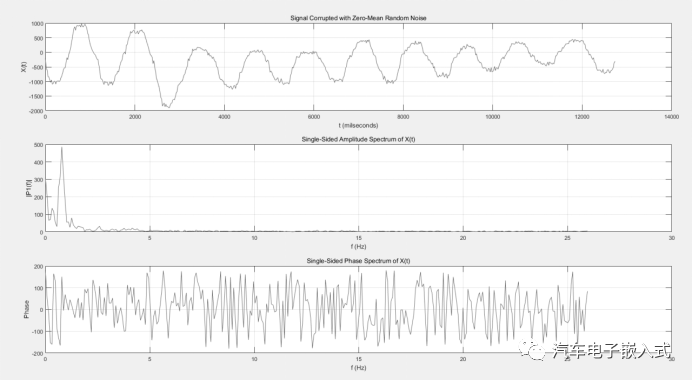
圖18.38 振動檢測并作基頻提取
我們對一個進行簡諧運動的物體進行連續的相位采集,然后通過相位計算得到一段段的微小位移,再將這些位移進行拼接處理,最終就可以還原出振動物體的軌跡。我們再對軌跡進行FFT,就可以計算得到它的基頻。通過這種方法,我們也可以作到幾十米之外,無接觸的測量鋼索的振動和拉力了。
振南說的很簡單,但實際上會比較復雜。很多細節是需要考慮和處理的,比如相位混疊(就是微位移超出了一個相位的范圍)、Rangebin跨域(振動正好生產在某一個Rangebin臨界點上)等等。
MMWR的根本是 數學 和 算法 。
關于毫米波更高階的知識和原理,振南就不再講了。再往深里寫,估計就要嚇退更多人了。適可而止!關于毫米波更多的應用,大家可以自行百度。比如毫米波液位計、壓力測量、溫度測量、膜厚測量、材料檢測等等。
編輯:黃飛
?











 工商網監
工商網監
評論