 電子發燒友App
電子發燒友App


關鍵詞: CPLD , 實時 , 視頻 , 圖像 , 芯片
圖像采集是實時圖像處理的重要步驟。目前,圖像傳感器件主要有CCD(Charge Coupled Device)和CMOS(Complementary Metal Oxide Scmiconductor)。CCD技術現在已經非常成熟,CCD攝像頭仍然是高端應用的首選器件。它輸出的模擬視頻信號包括圖像信號、行與場消隱信號、行與場同步信號等七種信號。傳統的視頻采集系統由A/D轉換電路、控制邏輯電路、數據緩存電路、地址發生器、地址譯碼電路等構成,此類設計有電路復雜、芯片繁多、開發周期長、成本高等缺點。
本文采用視頻解碼芯片與復雜可編程邏輯器件CPLD(Complex Programmable Logic Device)設計了一套實時圖像采集系統,克服了以上缺點。其中視頻解碼芯片可以從視頻信號中自動獲取行、場同步信號,并完成A/D轉換,而具有在系統編程(ISP)功能的CPLD可以通過軟件實現邏輯重構,將邏輯控制、地址發生器等電路全部集成在一塊芯片中。系統具有體積小、成本低、可靠性高、升級容易、開發周期短等優點。
1 視頻解碼芯片SAA7114H的性能特點[1]
SAA7114H是一個高集成度的電路,在視頻采集領域有著廣泛的應用。視頻解碼基于行鎖定時鐘解碼原則,能夠將PALSECAM和NTSC制式信號轉變為與ITU601標準兼容的標準視頻信號。sAA7114H能夠接收TV的CVBS信號或VCR的S-VIDEO信號,同時通過它的擴展接口(X端口)還能夠接收MEPG碼流或VIDEO PHONE碼流的數字視頻信號。經過SAA7114H解碼后的視頻信號,還能夠根據實際的應用,選擇8位或16位寬度的數據輸出格式。
SAA7114H的主要任務就是捕捉和縮放視頻圖像,向顯示控制器提供標準的YUV數字視頻流輸出格式。sAA7114H的主要特點如下:
(1)對每路CVBS或Y/C輸入信號可以選用可編程的靜態增益或自動增益控制。
(2)含有兩個9位視頻A/D變換器,在擴展接口中可以接收數字CVBS信號或Y/C信號的輸入。
(3)數字鎖相環適用于各種標準和非標準視頻信號源的同步處理和時鐘的產生。
(4)水平和垂直同步信號的檢測。
(5)在片產生符合ITU601標準的行鎖定時鐘。
SAA7114H還提供一個I2C接口,用于和主控芯片相連接,從而可以對其內部的寄存器進行讀寫操作,控制SAA7114H的工作狀態。
經過SAA7114H解碼后的視頻信號,必須保持正確的時序對應關系,才能完整無誤地恢復原來的視頻圖像。SAA7114H輸出的時序包括行場同步信號、行場消隱信號、行頻場頻、場識別信號等。以PAL制信號為例,其行、場時序關系如圖1所示。
其中,HREF信號為行消隱信號,VGATE代表場消隱信號(可以通過對寄存器VSTO[8:0]和VSTA[8:0]的編程進行確定),HREF與V123信號結合能判斷當前為奇場或是偶場,FID為場識別信號。以上各信號都能通過SAA7114H的相關管腳進行輸出(如RTSO、RTSI、XRH和XRV管腳等)。
2 復雜可編程邏輯器件XC95216的性能特點[2]
XC95216是Xilinx公司的一種復雜可編程邏輯器件,具有豐富的可編程I/O引腳、在系統可編程、使用方便靈活的特點。不但可實現常規的邏輯器件功能,還可實現復雜的時序邏輯功能。其主要功能特點如下:多達166個用戶I/0引腳,所有引腳的腳對腳邏輯延遲為10ns,fCNI可達111MHz,216個宏單元,具有4800個可用門。
3 實時圖像采集系統組成及其工作原理
本文設計的實時圖像采集系統是一個基于DSP的活動目標跟蹤系統的圖像采集部分。DSP對圖像采集部分提供的數字圖像信號進行相關的計算處理,識別目標,然后控制相關設備,達到跟蹤目標的目的。系統要求實時性強、體積小。
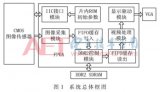
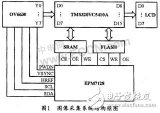
設計中采用視頻解碼芯片SAA7114H將CCD攝像頭獲得的模擬視頻信號轉換為數字信號。在此實時圖像處理系統中,恒速的視頻解碼芯片SAA7114H與變速的DSP圖像處理之間需要加入緩沖電路。緩沖電路一般有3種結構:雙口RAM結構、FIF0結構、乒乓緩存結構。前兩種緩沖結構的存儲容量相對較小,不是特別適合高速圖像處理系統。乒乓緩存結構的特點決定了可以用相對較便宜的高速大容量SRAM、外圍邏輯器件構成比雙口RAM以及高速FIFO更適合視頻處理系統所需要的緩沖存儲器。采用CPLD控制兩塊SRAM以乒乓方式工作,實現數據流在系統中的高速傳輸。
3.1 視頻采集的工作流程
視頻采集的硬件框圖如圖2所示。系統復位后,單片機(MCU)通過I2C總線對SAA7114H初始化。單片機采用Philips公司的P89C61X2BN,具有在系統編程功能,允許更改SAA7114H初始化程序,并可燒寫到單片機FLASH中,相當方便。初始化成功后,SAA7114H開始工作,將輸入的模擬視頻信號轉換成720×576的YUV422數字信號,然后輸入CPLD。CPLD一方面進行格式轉換,輸出YUV4:1:1、CIF。格式的數字信號,另一方面還作為地址發生器,與CIF、格式數據一起輸入到SRAM。CPLD還產生SRAM的讀寫控制信號,使用兩片SRAM,以乒乓方式工作,每片保存一場圖像。圖2中指向DA[7:0]的實線箭頭與指向DB[7:O]的虛線箭頭表示CPLD的D[7:0]端口的數據輪流輸送給DA與DB端口。在保存好一場圖像后,CPLD以中斷方式通知DSP作相應處理。
“乒乓操作”是一個常常應用于數據流控制的處理技巧。典型的乒乓操作方法如圖3所示。乒乓操作的處理流程如下:輸入數據流通過“輸入數據選擇單元”(在本采集系統中,CPLD內部邏輯結構完成此數據選擇功能),等時地將數據流分配到數據緩沖區SRAM A和SRAM B中。在第一場的時間,將輸入的數據流緩存到SRAM A。在第二場的時間,通過“輸入數據選擇單元”的切換,將輸入的數據流緩存到SRAM B,與此同時,將SRAM A的數據(第一場圖像數據),通過“輸出數據選擇單元”的選擇,送到“數據流運算處理模塊”(DSP)運算處理。在第三個緩沖周期,通過“輸入數據選擇單元”的再次切換,將輸入的數據流緩存到SRAM A,與此同時,將SRAM B的數據(第二場圖像數據)通過“輸出數據選擇單元”的切換,送到“數據流運算處理模塊”運算處理。如此循環,周而復始。
乒乓操作的最大特點是通過“輸入數據選擇單元”和“輸出數據選擇單元”,按節拍、相互配合地切換,將經過緩沖的數據流不停頓地送到“數據流運算處理模塊”,進行運算及處理。把乒乓操作模塊當作一個整體,此模塊兩端的輸入數據流與輸出數據流均是連續不斷的,沒有任何停頓,因此非常適合進行流水線式處理,完成數據的無縫緩沖與處理。
3.3 CPLD的設計
3.3.1 數據緩存
將數據保存到SRAM,需在采樣的同時產生地址。每塊SRAM的地址線都有兩組,一組由CPLD給出,一組由DSP給出。為了解決共用存儲器時的資源沖突問題,需控制DSP和SRAM、CPLD和SRAM之間的通斷[3]。CPLD通過提供總線隔離器的控制信號,在CPLD對SRAM A操作時就將CPLD到SRAM B的地址線、數據線、片選信號都置高阻,設置隔離器使DSP與SRAM B導通,而與SRAM A斷開,此時DSP可以讀取SRAM B,反之亦然。實際上,SRAM的數據線也有兩組,其工作方式和地址線一樣。為了給DSP以充裕的時間讀取RAM中的數據,還要控制將每場圖像存人不同的RAM,使兩片SRAM以乒乓方式工作。設計中選用了ISSI公司的IS61LV5128,容量為512KB。
3.3.2 接口
CPLD的主要外圍接口如下:(1)輸入部分。圖像數據lPD[7:0]、時鐘LCLK、場同步VREF、行同步HREF、復位RES。(2)輸出部分。圖像數據IP01[7:0]和IP02[7:O],片選信號eel、ce2,寫使能wel、we2,地址addl[18:0]、add2[18:O],總線隔離器的開關信號f1、f2,DSP中斷信號dspint(這里沒有設置SRAM的0E信號,因為CPLD只需要將數據寫入SRAM,不需要從SRAM中讀數據)。
3.3.3 VHDL實現
設計中采用VHDL對CPLD進行邏輯實現。程序中“乒乓”控制部分代碼如下:
本文設計了一套基于視頻解碼芯片SAA7114H與CPLD的實時圖像采集系統,其硬件結構簡單,系統穩定,完全滿足基于DSP的活動目標跟蹤系統的需要,具有很強的實用性,稍加改動即可用于其他場合,如監控系統等。
[/table]














 工商網監
工商網監
評論