 電子發(fā)燒友App
電子發(fā)燒友App


背景說(shuō)明
本文旨在通過(guò)使用 Bolt IoT 將面部解鎖功能帶到您的架子、門(mén)或衣柜。
我們生活在一個(gè)互聯(lián)網(wǎng)革命的時(shí)代,現(xiàn)在比以往任何時(shí)候都更容易進(jìn)行實(shí)驗(yàn)和創(chuàng)新,以提出可以對(duì)全世界數(shù)百萬(wàn)人產(chǎn)生積極影響的絕妙想法。
曾經(jīng)想為您家中的架子、抽屜、衣柜或門(mén)增加一點(diǎn)額外的安全性嗎?當(dāng)談到使用互聯(lián)網(wǎng)進(jìn)行創(chuàng)新時(shí),在我們可用的數(shù)千個(gè)平臺(tái)和工具中,有幾個(gè)脫穎而出的。這個(gè)項(xiàng)目中,我們將修改一個(gè)標(biāo)準(zhǔn)架子,使其擁有一個(gè)使用人臉驗(yàn)證解鎖的安全系統(tǒng)。我們將用C#構(gòu)建一個(gè)Windows 窗體應(yīng)用程序,它可以存儲(chǔ)、驗(yàn)證和解鎖受信任的面孔。它用于面部驗(yàn)證和Bolt IoT Cloud API,用于與 Bolt WiFi 模塊和 Arduino 進(jìn)行通信。我們將 Bolt WiFi 模塊與Arduino Uno連接,它將控制伺服電機(jī)鎖定/解鎖門(mén)。在這個(gè)項(xiàng)目的開(kāi)發(fā)過(guò)程中,很多這些概念都派上了用場(chǎng)。
第 1 步:構(gòu)建軟件
我們將使用 Visual Studio 構(gòu)建一個(gè) Windows 窗體應(yīng)用程序。此應(yīng)用程序在 Windows 機(jī)器上運(yùn)行,將負(fù)責(zé)管理授權(quán)人臉、使用 FacePlusPlus API 驗(yàn)證人臉以及與 Bolt WiFi 模塊通信。我們將使用 C# 進(jìn)行編碼。
啟動(dòng) Visual Studio 并創(chuàng)建新的 Windows 窗體應(yīng)用程序項(xiàng)目。如果您完全不熟悉 Visual Studio,我建議您學(xué)習(xí)使用 Visual Studio 進(jìn)行 Windows 窗體應(yīng)用程序開(kāi)發(fā)的基礎(chǔ)知識(shí)。
在本文中,我將僅使用項(xiàng)目中執(zhí)行主要和重要功能的代碼片段來(lái)解釋代碼。瀏覽整個(gè)代碼將是乏味且不必要的,因?yàn)槠渲写蟛糠侄际遣谎宰悦髑矣袚?jù)可查的。
我們的 Visual Studio 項(xiàng)目將 3 個(gè)庫(kù)用于各種目的。他們是:
AForge .NET:一種流行的 .NET 框架,用于 Windows 中的圖像處理。我們使用它從網(wǎng)絡(luò)攝像頭捕獲圖像。
Bolt IoT API .NET:我用 C# 編寫(xiě)的非官方客戶(hù)端庫(kù),用于與 Bolt Cloud API 進(jìn)行通信。
Newtonsoft JSON:一種流行的 .NET 高性能 JSON 框架。用于在我們的項(xiàng)目中解析 A??PI 響應(yīng)。
入門(mén)
在開(kāi)始編碼之前,我們需要設(shè)置一些東西。
1. Bolt Cloud API 憑證
如果您還沒(méi)有,請(qǐng)?jiān)L問(wèn)cloud.boltiot.com并設(shè)置一個(gè)帳戶(hù)。登錄后,將您的 WiFi 模塊與 Bolt Cloud 鏈接。為此,請(qǐng)?jiān)谀?a href="http://www.nxhydt.com/v/tag/107/" target="_blank">手機(jī)上下載 Bolt IoT 設(shè)置應(yīng)用程序。按照應(yīng)用程序中的說(shuō)明將您的設(shè)備與您的帳戶(hù)相關(guān)聯(lián)。這涉及將 Bolt 與本地 WiFi 網(wǎng)絡(luò)配對(duì)。成功鏈接后,您的儀表板將顯示您的設(shè)備。您現(xiàn)在可以從儀表板獲取您的設(shè)備 ID和API 密鑰。
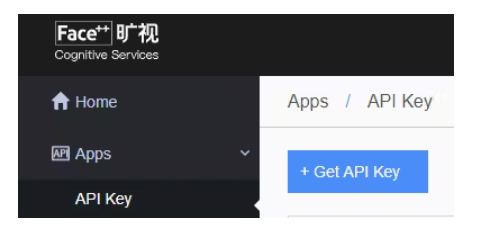
2. FacePlusPlus API 憑證
我們?cè)谶@個(gè)項(xiàng)目中依賴(lài)的另一個(gè) API 服務(wù)是FacePlusPlus API。它是一個(gè)免費(fèi)平臺(tái),提供各種圖像識(shí)別服務(wù)。我們用它來(lái)進(jìn)行面部識(shí)別。創(chuàng)建一個(gè)帳戶(hù)并轉(zhuǎn)到 FacePlusPlus 控制臺(tái)。轉(zhuǎn)到下方并單擊。記下新生成的API Key和API Secret 。API KeyApps+Get API Key
現(xiàn)在您應(yīng)該準(zhǔn)備好以下內(nèi)容:
private readonly string BOLT_DEVICE_ID = “BOLTXXXXXX”;
private readonly string BOLT_API_KEY = “XXXXXXXXXXXXXXXXXXXXXXXXXXXXXX”;
private readonly string FPP_API_KEY = “XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX”;
private readonly string FPP_API_SECRET = “XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX”;
我們創(chuàng)建一個(gè)名為 的 Bolt 類(lèi)的新全局實(shí)例myBolt,通過(guò)它我們將與 WiFi 模塊進(jìn)行所有未來(lái)的通信:
myBolt = new Bolt(BOLT_API_KEY, BOLT_DEVICE_ID);
也就是說(shuō),現(xiàn)在讓我們看看我們的應(yīng)用程序如何執(zhí)行一些核心功能。
功能介紹
1. 鎖定/解鎖門(mén)
我們?cè)O(shè)計(jì)了這樣的電路,當(dāng)數(shù)字引腳 0 為HIGH時(shí),門(mén)應(yīng)該被鎖定,而當(dāng)數(shù)字引腳 3 為 時(shí)HIGH,門(mén)應(yīng)該被解鎖。稍后我們討論電路原理圖時(shí)會(huì)更清楚地說(shuō)明這一點(diǎn)。
對(duì)于鎖定,我們使用DigitalMultiWrite庫(kù)中的方法將HIGH值寫(xiě)入 D0 并將 LOW 值寫(xiě)入 D3。這將向 Arduino 發(fā)出鎖門(mén)信號(hào)。同樣對(duì)于解鎖,我們將LOW值寫(xiě)入 D0 并將HIGH值寫(xiě)入 D3。這將向 Arduino 發(fā)出解鎖門(mén)的信號(hào)。
執(zhí)行鎖定的代碼:
private async Task LockDoor()
{
? ?MultiPinConfig multiPinConfig = new MultiPinConfig();
? ?MultiPinConfig.AddPinState(DigitalPins.D0, DigitalStates.High); //Lock Signal?
? ?multiPinConfig.AddPinState(DigitalPins.D3, DigitalStates.Low); //Unlock Signal
??
? ?await myBolt.DigitalMultiWrite(multiPinConfig);
??
? ?multiPinConfig = new MultiPinConfig();
? ?multiPinConfig.AddPinState(DigitalPins.D0, DigitalStates.Low); //Lock Signal?
? ?multiPinConfig.AddPinState(DigitalPins.D3, DigitalStates.Low); //Unlock Signal
??
? ?await myBolt.DigitalMultiWrite(multiPinConfig);
}
執(zhí)行解鎖的代碼:
private async Task UnlockDoor()
{
? ?MultiPinConfig multiPinConfig = new MultiPinConfig();
? ?multiPinConfig.AddPinState(DigitalPins.D0, DigitalStates.Low); //Lock Signal?
? ?multiPinConfig.AddPinState(DigitalPins.D3, DigitalStates.High); //Unlock Signal
??
? ?await myBolt.DigitalMultiWrite(multiPinConfig);
??
? ?multiPinConfig = new MultiPinConfig();
? ?multiPinConfig.AddPinState(DigitalPins.D0, DigitalStates.Low); //Lock Signal?
? ?multiPinConfig.AddPinState(DigitalPins.D3, DigitalStates.Low); //Unlock Signal
??
? ?await myBolt.DigitalMultiWrite(multiPinConfig);
}
2. 添加/刪除可信面孔
可信人臉的圖像數(shù)據(jù)被編碼為 Base64 字符串,并存儲(chǔ)在本地機(jī)器中。還存儲(chǔ)了每個(gè)人臉的對(duì)應(yīng)名稱(chēng)列表。在我們的程序中,要添加人臉,我們首先驗(yàn)證當(dāng)前幀中是否有可用的人臉。我們使用FacePlusPlus的Detect API來(lái)執(zhí)行此操作。它返回一個(gè) JSON 響應(yīng),其中包含檢測(cè)到的面部特征。如果沒(méi)有檢測(cè)到人臉,則響應(yīng)將是[]。一旦檢測(cè)到人臉,我們就會(huì)保存圖像的 base64 編碼字符串和相應(yīng)的名稱(chēng)。
去除臉部非常簡(jiǎn)單。按刪除按鈕將從保存的列表中刪除圖像數(shù)據(jù)和名稱(chēng)。
添加和保存人臉信息的代碼:
//Converting image to base64 string and adding it to the list.?
ImageDataList.Add(ImageToBase64((Image)PreviewBox.Image.Clone()));
//Adding name of the face to the list
NameList.Add(FaceNameTextBox.Text.Trim());
??
//Saves the face image data as a base encoded string, along with its name
Properties.Settings.Default.Base64ImageData = ImageDataList;
Properties.Settings.Default.FaceNames = NameList;
Properties.Settings.Default.Save();
刪除人臉信息的代碼:
//Removing face information at specified position in the list
NameList.RemoveAt(e.RowIndex);
ImageDataList.RemoveAt(e.RowIndex);
??
//Saving the the list after removal of a face
Properties.Settings.Default.FaceNames = NameList;
Properties.Settings.Default.Base64ImageData = ImageDataList;
Properties.Settings.Default.Save();
3.人臉驗(yàn)證
我們通過(guò)使用FacePlusPlus 中的比較 API來(lái)驗(yàn)證人臉是否可信。在此過(guò)程中,我們線性迭代保存列表中的每個(gè)人臉,并將其與捕獲的圖像進(jìn)行比較。如果 API 返回超過(guò) 80% 的置信度,我們將解鎖門(mén)。
進(jìn)行此比較的代碼如下所示:
WebClient client = new WebClient();
??
byte[] response = client.UploadValues("https://api-us.faceplusplus.com/facepp/v3/compare", new NameValueCollection()
{
? ? { "api_key", FPP_API_KEY },
? ? { "api_secret", FPP_API_SECRET },
? ? { "image_base64_1", face1Base64},
? ? { "image_base64_2", face2Base64}
? ? });
});
??
string confidence = JObject.Parse(System.Text.Encoding.UTF8.GetString(response))["confidence"].ToString();
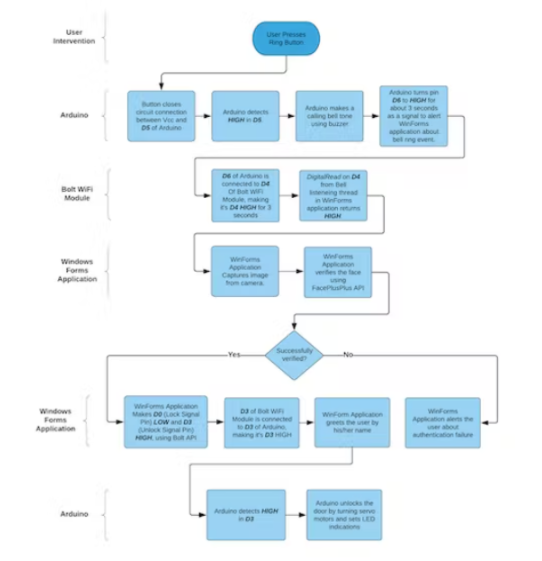
4. 偵聽(tīng)鈴聲
我們計(jì)劃提供一個(gè)物理按鈕,類(lèi)似于呼叫鈴按鈕,以便用戶(hù)可以在看著攝像頭時(shí)按下以解鎖門(mén)。為了使這成為可能,我們需要?jiǎng)?chuàng)建一個(gè)新的專(zhuān)用線程來(lái)持續(xù)偵聽(tīng)鈴聲按鈕按下事件。
在本文的后面,我們將看到如何使用按鈕以及按下按鈕時(shí)它將如何使 Bolt WiFi 模塊HIGH的 D4 引腳。現(xiàn)在,我們只假設(shè)上述情況。所以在這個(gè)線程中,我們不斷地計(jì)算 D4 引腳的值。如果是,我們將其作為鈴聲事件并進(jìn)行人臉捕獲和驗(yàn)證。DigitalReadHIGH
這是將在鈴聲偵聽(tīng)線程上連續(xù)運(yùn)行的代碼:
while (ListenForBell)
{
? ? Response R = await myBolt.DigitalRead(DigitalPins.D4);
? ? if (R.Value == "1")
? ? {
? ? ? ? RingBell_Click(null, null);
? ? ? ? Thread.Sleep(2000);
? ? }
? ? Thread.Sleep(2000);
}
我們?cè)诿看蔚g停止并等待 2 秒。否則會(huì)很快耗盡 Bolt Cloud API 的使用配額。
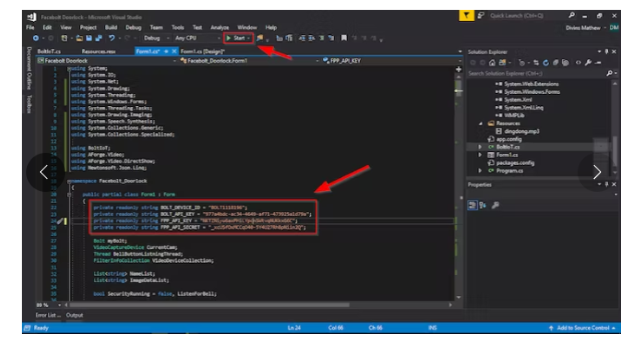
第 2 步:構(gòu)建 Visual Studio 項(xiàng)目
在 Visual Studio 中打開(kāi)下方提供的文件。解決方案加載后,打開(kāi)文件并使用您的 API 憑據(jù)更新代碼。按名為“開(kāi)始”的綠色播放按鈕,構(gòu)建并運(yùn)行程序。 Facebolt Doorlock.slnForm1.cs
該程序允許您從連接到系統(tǒng)的攝像頭設(shè)備中進(jìn)行選擇,并查看來(lái)自攝像頭的實(shí)時(shí)信息。您可以添加/刪除受信任的面孔。開(kāi)始人臉監(jiān)控。一旦程序驗(yàn)證了您的 Bolt 設(shè)備的連接性,您就可以直接從程序中按鈴或鎖門(mén)。
如果您現(xiàn)在對(duì)程序中人臉驗(yàn)證、鎖定和解鎖的工作方式感到困惑,沒(méi)關(guān)系。一旦我們看到電路原理圖設(shè)計(jì)和Arduino代碼,就會(huì)變得更加清晰。最后,我還將分解每個(gè)操作的事件流。
第 3 步:電路設(shè)計(jì)和 Arduino 代碼
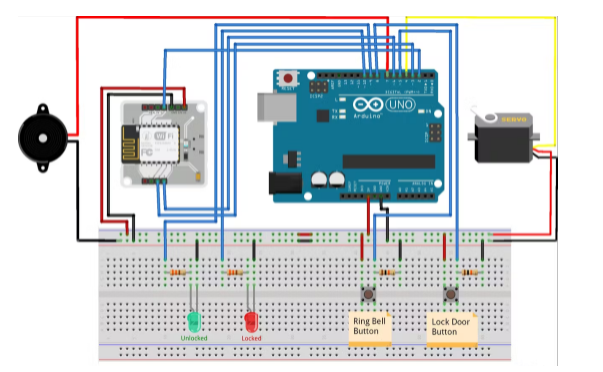
在我們的電路中,我們打算實(shí)現(xiàn)以下功能:
分別用于鎖定和解鎖門(mén)狀態(tài)的紅色和綠色 LED 指示燈。
一個(gè)按鈕,就像一個(gè)呼叫鈴開(kāi)關(guān)。按下時(shí),我們的 WinForms 應(yīng)用程序應(yīng)驗(yàn)證面部并在成功進(jìn)行面部身份驗(yàn)證后打開(kāi)門(mén)。
另一個(gè)按鈕來(lái)鎖門(mén)。
在門(mén)鈴響起和門(mén)鎖時(shí)發(fā)出蜂鳴聲的蜂鳴器。
我們項(xiàng)目的電路連接如下圖所示:
在上傳代碼之前,請(qǐng)確保您已在 IDE 設(shè)置中設(shè)置了正確的 Arduino 模型和端口。
Arduino代碼:
#include
??
#define ServoPin 4
#define LockSignalPin 2
#define UnLockSignalPin 3
#define BellButtonPin 5
#define LockButtonPin 8
#define RingBellSignalPin 6
#define BuzzerPin 7
#define GreenLedPin 9
#define RedLedPin 10
??
Servo myServo;
??
void setup()?
{
? ? pinMode(LockSignalPin, INPUT);
? ? pinMode(UnLockSignalPin, INPUT);
? ? pinMode(BellButtonPin, INPUT);
? ? pinMode(LockButtonPin, INPUT);
??
? ? pinMode(BuzzerPin, OUTPUT);
? ? pinMode(RedLedPin, OUTPUT);
? ? pinMode(GreenLedPin, OUTPUT);
? ? pinMode(RingBellSignalPin, OUTPUT);
??
? ? digitalWrite(RedLedPin, LOW);
? ? digitalWrite(GreenLedPin, LOW);
? ? digitalWrite(RingBellSignalPin, LOW);
??
? ? myServo.attach(ServoPin);
? ? Serial.begin(9600);
}
??
void loop()?
{
? ? int lockButton, lock, unlock, bell;
? ? char snum[5];
??
? ? lock = digitalRead(LockSignalPin);
? ? unlock = digitalRead(UnLockSignalPin);
? ??
? ? // Check if lock signal from Bolt is HIGH
? ? if(lock == HIGH)
? ? {
? ? ? ? // Turn motor to locked position
? ? ? ? myServo.write(120);
? ? ? ??
? ? ? ? // Set LED indications
? ? ? ? digitalWrite(GreenLedPin, LOW);
? ? ? ? digitalWrite(RedLedPin, HIGH);
??
? ? ? ? // Buzz locking sound
? ? ? ? digitalWrite(BuzzerPin, HIGH);
? ? ? ? delay(1000);
? ? ? ? digitalWrite(BuzzerPin, LOW);
? ? ? ? delay(1000);
? ? }
? ? // Check if unlock signal from Bolt is HIGH
? ? else if(unlock == HIGH)
? ? {
? ? ? ? // Turn motor to unlocked position
? ? ? ? myServo.write(0);
? ? ? ??
? ? ? ? // Set LED indications
? ? ? ? digitalWrite(GreenLedPin, HIGH);
? ? ? ? digitalWrite(RedLedPin, LOW);
? ? ? ? delay(2000);
? ? }
??
? ? bell = digitalRead(BellButtonPin);
? ? if(bell == HIGH) // User pressed bell ring betton
? ? {
? ? ? ? // Signal Bolt that ring button was pressed
? ? ? ? digitalWrite(RingBellSignalPin, HIGH);
??
? ? ? ? // A calling bell sound pattern !
? ? ? ? digitalWrite(BuzzerPin, HIGH);?
? ? ? ? delay(100);
? ? ? ? digitalWrite(BuzzerPin, LOW);
? ? ? ? delay(20);
? ? ? ? digitalWrite(BuzzerPin, HIGH);
? ? ? ? delay(200);
? ? ? ? digitalWrite(BuzzerPin, LOW);
? ? ? ? delay(100);
? ? ? ? digitalWrite(BuzzerPin, HIGH);
? ? ? ? delay(100);
? ? ? ? digitalWrite(BuzzerPin, LOW);
? ? ? ? delay(20);
? ? ? ? digitalWrite(BuzzerPin, HIGH);
? ? ? ? delay(200);
? ? ? ? digitalWrite(BuzzerPin, LOW);
? ? ? ? delay(1500);
??
? ? ? ? // Turn off the signal
? ? ? ? digitalWrite(RingBellSignalPin, LOW);
? ? }
??
? ? lockButton = digitalRead(LockButtonPin);
? ? if(lockButton == HIGH) // User pressed lock betton
? ? {
? ? ? ? // Turn motor to locked position
? ? ? ? myServo.write(120);
? ? ? ??
? ? ? ? // Set LED indications
? ? ? ? digitalWrite(GreenLedPin, LOW);
? ? ? ? digitalWrite(RedLedPin, HIGH);
??
? ? ? ? // Buzz locking sound
? ? ? ? digitalWrite(BuzzerPin, HIGH);
? ? ? ? delay(1000);
? ? ? ? digitalWrite(BuzzerPin, LOW);
? ? }
}
事件流
現(xiàn)在我們已經(jīng)準(zhǔn)備好 WinForm 應(yīng)用程序和 Arduino 設(shè)計(jì),讓我們深入研究代碼并探索每個(gè)操作的控制流程。
1. 響鈴按鈕按下
2. 鎖定按鈕按下
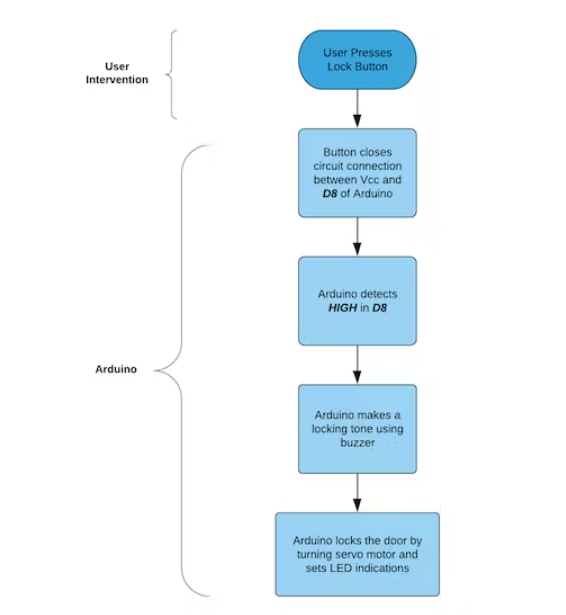
上述兩個(gè)操作也可以直接從 Windows 窗體應(yīng)用程序執(zhí)行。
在這里,我們可以觀察到Bolt WiFi 模塊作為 Windows 窗體應(yīng)用程序和 Arduino 之間的重要無(wú)線接口。Bolt Cloud API 的使用使我們能夠擴(kuò)展我們的項(xiàng)目并在 Android 等其他平臺(tái)上構(gòu)建應(yīng)用程序,并使用我們的手機(jī)解鎖門(mén)!這種靈活性是物聯(lián)網(wǎng)和 Bolt 平臺(tái)的力量所在。
現(xiàn)在我們已經(jīng)完成了軟件設(shè)計(jì)部分,讓我們繼續(xù)構(gòu)建一個(gè)可鎖定的門(mén)機(jī)制。
第 4 步:構(gòu)建硬件
我有一個(gè)鞋架,所以在這個(gè)項(xiàng)目中,我將用它來(lái)演示鎖具。您可以使用架子、門(mén)或衣柜或任何具有可破解鎖定機(jī)制的東西。

我們需要建立一個(gè)耦合機(jī)構(gòu),將我們的伺服電機(jī)與鎖連接起來(lái)。為此,我的想法是使用一個(gè)瓶子和另一個(gè)瓶蓋的截?cái)囝i部。將瓶頸連接到伺服電機(jī),將蓋子連接到鎖上。然后我們將使用尼龍線將它們連接起來(lái)。每當(dāng)電機(jī)轉(zhuǎn)動(dòng)時(shí),這將導(dǎo)致鎖定/解鎖動(dòng)作。
所需的瓶蓋上鉆有一個(gè)孔,如下圖所示。我們將把它連接到鞋架的鎖軸上。

另一個(gè)瓶子的蓋子必須連接到伺服電機(jī)上。我們使用銅線將蓋子連接到電機(jī)的轉(zhuǎn)軸。

現(xiàn)在我們需要將這兩者結(jié)合起來(lái)。為此,我們使用尼龍線。使用所需長(zhǎng)度的線制作一個(gè)環(huán),并將線連接到兩個(gè)蓋子上。

一旦耦合,它們可以引起相互旋轉(zhuǎn)的動(dòng)作:

現(xiàn)在我們已經(jīng)準(zhǔn)備好轉(zhuǎn)動(dòng)機(jī)構(gòu),是時(shí)候進(jìn)入鎖并修復(fù)我們的瓶頸了。我們?cè)谏厦驺@了一個(gè)孔,所以我們需要做的就是從機(jī)架上擰下鎖軸,將瓶頸放在上面,然后重新擰緊鎖。

現(xiàn)在唯一要做的就是將伺服電機(jī)固定在鞋架上。我們將使用熱膠槍將電機(jī)密封到機(jī)架上。

調(diào)整好螺紋長(zhǎng)度并充分?jǐn)Q緊后,我們就完成了最后的設(shè)置。如下圖所示,伺服電機(jī)可以正確鎖門(mén)和開(kāi)鎖!
不過(guò),不一定必須使用瓶頸 - 螺紋耦合方法。你可以選擇一個(gè)最適合和方便您的鎖系統(tǒng)的任何方法。
幸運(yùn)的是,我在機(jī)架的正確位置開(kāi)了一個(gè)小口。這使我能夠輕松地連接伺服電機(jī)。經(jīng)過(guò)一些裝飾工作和貼標(biāo)后,我們最終的智能鞋架現(xiàn)已準(zhǔn)備就緒。

我們現(xiàn)在都準(zhǔn)備好了。剩下要做的就是啟動(dòng)電路,在 WinForms 應(yīng)用程序上添加一個(gè)受信任的面孔,并享受我們門(mén)上的人臉鎖安全性。您需要同時(shí)為 Arduino 和 Bolt WiFi 模塊供電。我使用 10000 mA時(shí)的移動(dòng)電源為他們倆供電。我使用的網(wǎng)絡(luò)攝像頭是 Microsoft LifeCam VX-800。它很舊,但仍然比筆記本電腦的相機(jī)好。
結(jié)論
該項(xiàng)目是由 Bolt IoT 提供支持的 Internshala 物聯(lián)網(wǎng)培訓(xùn)的成果。雖然這個(gè)項(xiàng)目非常簡(jiǎn)單,但它向我們展示了物聯(lián)網(wǎng)的潛力以及它如何讓人們的日常生活更輕松。












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論