 電子發燒友App
電子發燒友App


PC機的MPEG-4編碼原理及實現
日益增長的多媒體通信量和有限的通信帶寬之間的矛盾日益突出。為了減小傳輸的數據量,國際電信聯盟和MPEG標準組織都制定過各自的視頻壓縮標準。其中,最新MPEG-4標準以其高壓縮率,支持低碼率傳輸和基于對象編碼等優點,而在傳真、視頻點播、電視會議、醫用圖像傳輸等領域廣泛應用。
MPEG-4繼承了MPEG-2中檔次和等級概念,共有視頻檔次、音頻檔次、圖形檔次和場景描述檔次共四類。檔次是針對某一特定的應用而采用的編碼工具,它是MPEG-4提供的工具集中一個子集,不同的檔次就是不同的子集。每一個檔次分為一個或多個等級,等級則定義了比特流參數的規格,實際上是限定了解碼一個編碼序列所應具備的性能。
MPEG-4的獨特之處在于支持基于內容的編解碼,為此引入了視聽對象AVO(Audio/Video Object)的概念。AVO可以是一幅圖像中一個小提琴或琴聲等,每個AVO可獨立編碼,但相互之間又存在著時空結構關系,因此編碼時,必須傳送編碼對象的組成結構信息體“場景描述”,以表示場景中各AVO之間的時空結構關系。解碼時根據此“場景描述”對圖像和聲音的有關內容進行編輯和操作。視聽對象還可以是一個矩形幀,從而使MPEG-4兼容原來的MPEG標準。視聽對象中的視頻對象VO通常由3類信息來描述,即運動、形狀和紋理信息。
1 編碼原理
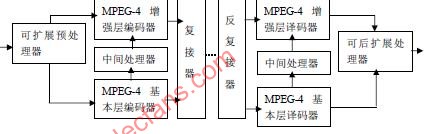
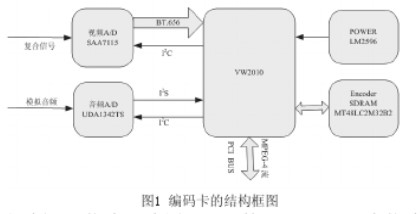
MPEG-4編碼器主要由形狀編碼、紋理編碼和運動編碼三部分組成。幀格式分為I-VoP,P-VOP和B-VOP。這里只討論I-VOP和P-VOP。I-VOP采用紋理編碼來消除一幀圖像數據間的空間冗余度;P-VOP是參考前一幀圖像,并采用兩種參數來編碼。一種是當前要編碼的圖像與參考圖像之間的差值;另一種是運動矢量。編碼器的具體結構模塊如圖1所示。
1.1 形狀編碼
形狀編碼主要用于記錄從圖像序列中提取VOP的形狀信息,該信息分為二值形狀信息和灰度形狀信息。二值形狀信息用0和1兩個值表示VOP的形狀;灰度形狀信息用0~255表示VOP區域的不同透明度。在編碼時,當提取的VOP具有非矩形形狀時,需要對其進行邊界擴展,使其矩形邊界都是16的倍數,同時保證擴展后的面積最小,然后進行形狀編碼;當提取的VOP為矩形時(矩形的長度和寬度都是16的倍數),形狀編碼就會被屏蔽。
1.2 紋理編碼
紋理編碼主要對I-VOP內的圖像像素或P-VOP內的差值像素進行編碼,包括DCT、量化、DC和AC預測、熵編碼等過程,最大程度地去除當前VOP內各像素之間的空間冗余度。
視頻的第一幀圖像采用I-VOP格式編碼,其余的幀采用I-VOP,還是P-VOP格式則受兩個因素制約。其用戶會按照IPPPIPPPI的方式設置當前幀所采用的格式;二是已經人為地設置了當前幀為P-VOP,通過運動估計計算mad_P的值,如果mad_P滿足下列兩個條件之一,則當前幀就采用P-VOP編碼格式,否則采用I-VOP編碼格式。
條件1:mad P<50/3;
條件2:mad P<50,并且IntraMBRatio<0.4。其中,IntraMBRatio為當前幀中采用MBM_INTRA預測模式的宏塊占總宏塊的比重。
紋理編碼中的DCT和量化模塊比較簡單,這里略過,重點介紹剩下的紋理編碼模塊。
1.2.1 DC和AC預測
8×8塊經過DCT和量化后,系數排列呈現以下的規律,即非零系數集中在左上角,大部分的0系數集中在偏離DC系數向右和向下的位置上。特別是DC系數、第一行和第一列AC系數,數值非零且較大,如果能用較小的數值代替它們,會減少編碼后的位流數,于是產生DC和AC預測。
在MPEG-4中,通常把一個宏塊分為6個8×8塊進行DC和AC預測。
首先對8×8塊進行DC預測。如圖2所示,X表示當前的8×8塊;A,B和C表示X的相鄰8×8塊,其位置分別位于X的左邊、左上角和上邊。對X進行DC預測就是采用相鄰塊的DC系數值預測X的DC系數值,關鍵是選擇哪個相鄰塊的DC系數。
程序采用了以下策略選取相鄰塊。定義塊A,B,C,X的DC系數值分別為DC_A,DC_B,DC_C,DC_X。
如果DC_A與DC_B的差小于DC_B與DC_C的差,則DC_A與DC_B在數值上比較接近,即在垂直方向上的數值比水平方向上更接近,所以采用DC_C來預測DC_X;反之,在水平方向的數值比較接近,即采用DC_A來預測DC_X。
將當前塊的DC系數與用來預測的相鄰塊的DC系數,經過特定處理后做差,其差存放到當前塊的DC位置上,同時記錄此DC系數的預測方向。
AC預測主要是針對8×8塊的第一行或者第一列AC系數,其預測方向取決于當前塊DC系數的預測方向。如圖2所示,如果之前DC預測為水平預測,則當前塊X的第一列AC系數采用A塊的第一列AC系數預測,同時將X的第一列7個AC系數各自取絕對值后相加到變量S1(S1的初始值為0)上。將當前塊第一列AC系數與用來預測的相鄰塊A的第一列AC系數做差,其7個差值存放到當前塊的第一列AC系數的位置上,同時將7個差值各自取絕對值后相加到變量S2(S2的初始值為0)上。如果之前的DC預測為垂直預測,則只進行當前塊X的第一行AC系數預測,其預測步驟同第一列AC系數的預測一樣。
有時AC預測會產生較大的預測誤差,并沒有達到節省位流的目的,因此必須判斷AC預測的有效性。在單個8×8小塊的AC預測中,用S1記錄了此小塊的第一行或第一列AC系數的絕對值之和,用S2記錄了第一行或第一列預測后7個差值的絕對和。以一個宏塊的6個8×8小塊為單位,將各個小塊的S1與S2之差相加,得到值S。如果S非零,則此宏塊進行AC預測,其標志ACpred_flag置1,否則此宏塊不進行AC預測,ACpred_flag置0。
1.2.2 之字型掃描
DC和AC預測之后,對8×8塊的系數進行之字形掃描,共有Zigzag,Zigzag_v(交替垂直掃描)和Zigzag_h(交替水平掃描)三種掃描方式。采用何種掃描方式由三個要素決定,即幀內還是幀間預測,AC預測標志ACpred_flag的值,DC系數的預測方向。
對于幀內預測的宏塊,如果AC預測標志ACpredflag為0,則此宏塊中的6個8×8塊都使用Zigzag掃描;如果AC預測標志為1,則此宏塊中的6個8×8塊將根據各自的DC預測方向決定AC系數的掃描方向。如果DC預測為水平預測,則此8×8塊使用Zigzag_v掃描方式掃描系數,否則使用Zigzag_h掃描方式。
對于幀間預測的宏塊,其每個8×8塊統一采用Zigzag掃描方式掃描系數。
8×8的系數矩陣經過之字型掃描后,大部分非零系數集中在一個一維數組的前部,大部分零系數集中在此一維數組的后面,根據此特點便產生了游程編碼。
1.2.3 游程編碼和熵編碼
所謂游程編碼就是對8×8系數矩陣的AC系數進行特定的處理,使其成為個數更少的三維矢量(Last,Run,Level)。其中,Level代表非0系數的大小。Run代表Level前面連續0的個數。Last代表終止標志:其值為0時,表示Level后還有不為0的系數;其值為1時表示該系數是最后不為0的數;余下的系數全為0。游程編碼生成三維矢量,壓縮了數據量,然后根據Last,Run和Level的不同組合作為索引,找到對應Huffman編碼表中的碼字,生成碼流。
1.3 運動編碼
運動編碼對當前P-VOP和參考VOP進行運動估計與補償,減小幀間的時間相關性,實現壓縮。
通常采用塊匹配法進行運動估計。塊匹配法就是針對當前幀中某一特定大小的圖像塊,從參考幀的一定區域中找出該圖像塊絕對誤差和(Sum of AbsoluteDifference,SAD)的最小匹配塊,利用此匹配塊來預測當前塊。圖像塊的絕對誤差和指兩個大小相同的圖像塊的中像素差的絕對值之和。SAD16×16函數實現當前宏塊和參考宏塊間的絕對誤差和;SAD8×8函數實現當前8×8塊與參考8×8塊間的絕對誤差和。
確定了塊匹配準則后,就要進行最優匹配點的搜索,MPEG-4校驗模型最后采用鉆石搜索法(Diamond Search,DS)。鉆石搜索法是一種利用搜索模板的形狀和大小,對運動估計算法速度及精度產生重要影響的快速搜索法。選用了兩種形狀和大小都不相同的搜索模板:一種是大鉆石搜索模板(Large DiamondSearch Pattern,LDSP),它有9個候選位置:(0,0),(0,2),(1,1),(2,0),(1,-1),(0,-2),(-1,-1),(-2,0)和(-1,1)。具體模板如圖3所示。一種是小鉆石搜索模板(Small Diamond Search Pattern,SDSP),它包含5個候選位置:(0,0),(0,1),(1,0),(0,-1)和(-1,0)。具體模板如圖4所示。
鉆石搜索過程如下:以當前幀的當前宏塊的左上角起點坐標為大模板的原點(0,0),在參考幀的搜索范圍內,分別以大模板的(0,0),(0,2),(1,1),(2,0),(1,-1),(0,-2),(-1,-1),(-2,0)和(-1,1)像素點作為宏塊的左上角起點,將該宏塊和當前幀的宏塊做SAD16×16運算,選擇SAD16×16值最小的左上角起點作為暫時的最佳匹配點,此點與當前宏塊左上角起點之間的位移就是運動矢量。判斷此運動矢量是否適合特定的規則,如果不適合,則進行新一輪的大鉆石模板搜索,直到找到適合條件的運動矢量。然后再以大鉆石模板搜索的最佳匹配點為中心點(0,0),用小鉆石搜索模板進行(0,1),(1,0),(0,-1)和(-1,0)四個參考點的精確搜索,搜索到的SAD16×16值最小點就是最終的最佳匹配點,最佳匹配點與當前宏塊的左上角起點之間的位移就是最終的運動矢量。
以上是基于宏塊的全像素搜索,還可以選擇是否進行基于8×8塊的全像素搜索。利用已經得到的基于宏塊的運動矢量,找到基于宏塊的最佳匹配點。此匹配點為中心(0,0),其他匹配點為(-1,-1),(0,-1),(1,-1),(-1,0),(1,0),(-1,1),(0,1),(1,1),分別以這9個匹配點作為8×8像素塊的左上角起點,將該8×8塊和當前幀的8×8塊做絕對差值和的運算,選擇SAD8×8值最小的左上角起點作為最佳匹配點,以找到最佳運動矢量,得到宏塊內每個8×8亮度塊的運動矢量和SAD8×8值。將4個SAD8×8的和與SAD16×16做比較,將較小值按照一定的規則處理,從而判斷當前宏塊的預測模式為幀內或幀間預測。
如果采用幀間預測,進一步采用半像素搜索。首先對整個參考幀進行雙線性差值,則參考幀的面積變為原來的4倍,然后在特定的搜索范圍內搜索出更精確的運動矢量,最后根據參考圖像的亮度信息、色度信息和運動矢量做運動補償。
如果采用幀內預測,不再對當前宏塊進行任何運動估計,相應運動補償后的參考宏塊數值為0。
最后用當前幀減去運動補償后參考圖像得到差值,將差值數據進行紋理編碼;對每個宏塊的運動矢量進行預測并求出差分值,對差分值進行位流轉換并輸出。
2 編碼器的實現和測試
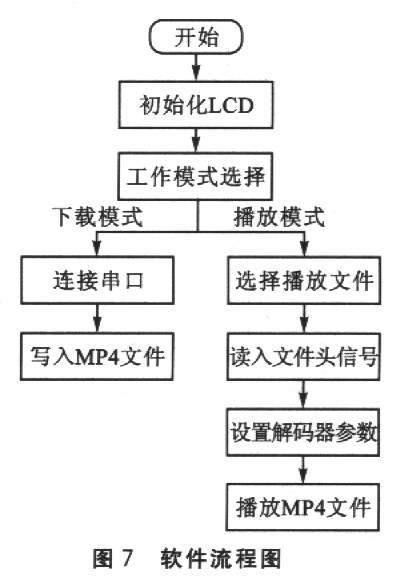
根據圖1并結合MPEG-4編碼器各個模塊的實現原理,進行編碼器主函數的編寫和調試。初步確定編碼器的主函數應包括以下三部分:
初始化部分由于參考代碼中存在RGB到YUV的圖像格式轉換函數(本文未介紹),則應開辟相應的存儲BMP和YUV圖像的空間;還要開辟空間存放編碼器生成的壓縮文件;必須設置編碼器的編碼參數。
編碼處理部分此部分是通過循環編碼各幀圖像來實現的,讀入一幀圖像后,判斷是采用I幀還是P幀,然后輸出VOP頭信息,進行當前VOP的編碼并輸出位流信息到緩沖器中,最后利用fwrite函數形成磁盤文件。
釋放資源前面兩個階段開辟的內存空間必須釋放掉,整個視頻的編碼過程結束。
結合參考的編碼主函數,調試并運行編碼器,生成divx文件,相應地調試出解碼器。逐一更改編碼器的量化參數QP、幀率、輸出碼率和I幀間隔參數,測試出它們對編碼效果的影響,如量化參數QP、幀率和I幀間隔參數與壓縮比成正比,輸出碼率與壓縮比成反比。經過綜合測試,在保證解碼圖像質量的前提下,當QP為8,幀率為30 f/s,輸出碼率為400 000 b/s,I幀間隔為3時,壓縮比為58.8,此時達到最好的壓縮效果。當然,如果對解壓后的視覺效果要求不高的話,壓縮倍數還可以繼續提高。
3 結語
所講的MPEG-4是MPEG-4標準的Part2部分,其編解碼器已經獲得了許多廠商的支持。目前,作為MPEG-4 Part10的H.264也已經推出并發展,相比MPEG-4 Part2,H.264在同樣質量下,其碼率能降低50%左右,說明MPEG-4一直在發展。隨著基于內容的編碼技術的實用化發展,MPEG-4將有更為廣泛的應用前景。










 工商網監
工商網監
評論