圖像處理FPGA 設(shè)計(jì)基本方法:1.陣列結(jié)構(gòu)結(jié)合流水線處理設(shè)計(jì)例如RGB圖像,包括三組數(shù)據(jù),處理時(shí)需要并行三通道后,每個(gè)通道進(jìn)行分別的串行流水處理。2.緩存設(shè)計(jì)幀緩存 行緩存 列對(duì)齊3.資源分辨率 處理窗口 對(duì)資源影響成倍增加
2019-01-04 13:59:26
圖像在采集和傳輸?shù)倪^(guò)程中,通常會(huì)產(chǎn)生噪聲,使圖像質(zhì)量降低,影響后續(xù)處理。因此須對(duì)圖像進(jìn)行一些圖像濾波、圖像增強(qiáng)等預(yù)處理。為改善圖像質(zhì)量,去除噪聲通常會(huì)對(duì)圖像進(jìn)行濾波處理 ,這樣既能去除噪聲,又能保持圖像細(xì)節(jié)。
2021-02-04 07:03:26
有沒(méi)有l(wèi)abview做車(chē)牌識(shí)別的經(jīng)驗(yàn)或資料 求指導(dǎo)謝謝
2012-11-21 10:27:00
matlab完成算法驗(yàn)證。本文首先確定車(chē)輛牌照在原始圖像中的水平位置和垂直位置,從而定位車(chē)輛牌照,然后采用局部投影進(jìn)行字符分割。在字符識(shí)別部分,采用較為簡(jiǎn)單的末班匹配方法進(jìn)行識(shí)別。實(shí)驗(yàn)結(jié)果表明,該方法具有
2012-07-27 13:09:08
Linux系統(tǒng)下對(duì)圖像進(jìn)行處理,將目標(biāo)中值找出,然后對(duì)每幀進(jìn)行處理輸出HDMI數(shù)據(jù)到投影儀,實(shí)現(xiàn)與鼠標(biāo)一樣的選擇效果
2015-11-11 11:00:32
視頻數(shù)據(jù)傳輸,并在Linux系統(tǒng)下對(duì)圖像進(jìn)行處理,將目標(biāo)中值找出,然后對(duì)每幀進(jìn)行處理輸出HDMI數(shù)據(jù)到投影儀,實(shí)現(xiàn)與鼠標(biāo)一樣的選擇效果
2015-11-11 11:00:31
車(chē)牌定位系統(tǒng)
2018-07-21 16:52:46
像素以上的。二、算法實(shí)現(xiàn)-定位那么,基于創(chuàng)龍TMS320C665x開(kāi)發(fā)板的車(chē)牌識(shí)別,主要就包括如下幾個(gè)部分:1、圖像處理的基礎(chǔ)理論,這里就選用了bmp文件格式,而對(duì)于其他的文件格式也都是觸類(lèi)旁通的。2
2016-05-01 16:41:22
學(xué)習(xí)。結(jié)合數(shù)據(jù)手冊(cè)與例程函數(shù),學(xué)習(xí)各個(gè)外設(shè)的配置流程、使用方法。2、熟悉TI的圖像處理的庫(kù),及庫(kù)函數(shù)的使用。TI對(duì)于C665X的專(zhuān)用圖像處理庫(kù),對(duì)于庫(kù)中的每個(gè)函數(shù)都進(jìn)行測(cè)試。主要有C66X-IMGLIB
2016-03-03 17:57:46
讀取過(guò)來(lái)了。 原始圖像如下:(我去,不支持上傳BMP格式圖片,還得用QQ截個(gè)圖) 3.確定車(chē)牌區(qū)域確定車(chē)牌位置的方法有很多,這里使用的是最簡(jiǎn)單的算法來(lái)做車(chē)牌定位。 上一步,已經(jīng)獲取了圖片數(shù)據(jù)。但是這里
2016-01-10 21:19:59
` 本帖最后由 小鷹fighting 于 2013-10-7 03:12 編輯
嘗試做下車(chē)牌識(shí)別,還是有點(diǎn)難度的。測(cè)試條件:藍(lán)色車(chē)牌。下面我來(lái)講講我的方法與思路。①獲取原始圖片②初步獲取車(chē)牌
2013-10-07 03:11:01
,以便進(jìn)行后續(xù)的操作。可以使用函數(shù)cvtColor完成。邊緣:提取圖像邊緣,重點(diǎn)提取車(chē)牌及其其中字符的邊緣,可以使用函數(shù)Sobel完成。二值化:對(duì)圖像進(jìn)行閾值處理,將其處理為二值圖像,可以使用函數(shù)
2023-06-01 20:38:24
少之又少。今天給大家分享的車(chē)牌識(shí)別案例,其實(shí)在我們生活中已經(jīng)很常見(jiàn)了。各大停車(chē)場(chǎng)早就配備了這種車(chē)牌自動(dòng)識(shí)別的設(shè)備。車(chē)牌識(shí)別,其中基本上已經(jīng)包含了圖像處理中基本的常用算法。像邊緣檢測(cè),腐蝕膨脹等。所以
2017-05-25 21:07:04
。在字符分割中,得益于定位的良好效果,通過(guò)合理地二值化與濾波處理,提出了一種改進(jìn)的投影法。該算法克服了車(chē)牌群光照變化跨度大以及邊框、鉚釘?shù)瘸R?jiàn)因素干擾,使投影法字符分割的準(zhǔn)確率得到了一定的提升。車(chē)牌
2011-07-14 09:05:28
應(yīng)用C語(yǔ)言編程,系統(tǒng)能夠?qū)?b class="flag-6" style="color: red">車(chē)牌進(jìn)行識(shí)別,并能夠?qū)?b class="flag-6" style="color: red">車(chē)牌進(jìn)行預(yù)處理,灰度化,圖像二值化,字符分割,字符識(shí)別等一系列的應(yīng)用,跪求大神幫助
2020-06-01 15:56:39
TFT_CTL模塊后端對(duì)rgb圖像首先進(jìn)行了rgb2ycbcr算法的實(shí)現(xiàn),然后將灰度圖像轉(zhuǎn)化為二值圖像,最后在二值圖像的基礎(chǔ)上對(duì)圖像進(jìn)行了水平和垂直投影,最終完成了多個(gè)字符的分割。這為FPGA實(shí)現(xiàn)車(chē)牌
2018-08-07 10:15:35
雙峰直方圖的圖像,不適合直方圖中雙峰差別很大或雙峰間的谷比較寬廣而平坦的圖像。該方法認(rèn)為圖像由前景和背景組成,在灰度直方圖上,前景和背景會(huì)形成高峰,在雙峰之間的最低谷處就是閾值。3.識(shí)別車(chē)牌區(qū)域
2021-02-24 22:03:47
車(chē)牌區(qū)域提取圖2 車(chē)牌區(qū)域提取2.2 水平垂直投影實(shí)現(xiàn)定位上之前的文章中已經(jīng)進(jìn)行了水平投影處理的詳細(xì)解讀,本節(jié)在此基礎(chǔ)上實(shí)現(xiàn)垂直投影,最終完成二值化圖像的水平垂直投影,獲取目標(biāo)的區(qū)域位置。目標(biāo)可以
2019-03-03 17:36:23
進(jìn)行列求和;垂直方向投影,將圖像數(shù)組進(jìn)行行求和。在做基于FPGA的實(shí)時(shí)車(chē)牌精確定位時(shí),為得到車(chē)牌區(qū)域的左右上下邊界,用到了水平和垂直投影,由于圖像是按行掃描,相對(duì)水平投影垂直投影復(fù)雜些,本章節(jié)主要針對(duì)
2019-03-03 17:51:01
摘要現(xiàn)代顯示設(shè)備,例如液晶顯示器(LCD),通常用作成像或投影系統(tǒng)的光源。 通過(guò)使用VirtualLab中的面板類(lèi)型光源,可以方便地對(duì)這種顯示設(shè)備建模。 作為示例,本案例選擇了圖像投影透鏡并使用面板
2022-02-18 15:12:28
STM32的主要優(yōu)點(diǎn)是什么?怎么實(shí)現(xiàn)基于STM32F103單片機(jī)的車(chē)牌識(shí)別圖像處理識(shí)別系統(tǒng)的設(shè)計(jì)?
2021-09-29 06:29:46
的圖像,常用的圖像處理方法有圖像增強(qiáng)、復(fù)原、編碼、壓縮等。下面維視圖像為您簡(jiǎn)單介紹一下數(shù)字圖像處理的常用技術(shù)方法:圖像編碼壓縮:圖像編碼壓縮技術(shù)可減少描述圖像的數(shù)據(jù)量(即比特?cái)?shù)),以便節(jié)省圖像傳輸、處理
2015-11-18 11:45:58
完整的車(chē)牌識(shí)別系統(tǒng)包括哪些部分?圖像預(yù)處理包括哪幾種方法?圖像邊緣檢測(cè)包括哪幾種方法?
2021-07-19 08:43:36
求一段代碼,要求如下:實(shí)現(xiàn)傾斜校正,能夠定位出帶污漬、昏暗的背景較多的車(chē)牌圖像,然后預(yù)處理算法好,準(zhǔn)確度達(dá)90%以上,最終以彩色圖片輸出,或者在原圖像中框出車(chē)牌區(qū)域。。。。。。有會(huì)做的在聯(lián)系:qq:1595560645
2016-05-16 12:34:02
的方法號(hào)碼提取是通過(guò)計(jì)算相似度的方法【處理效果】NO.1:原始圖像NO.2:車(chē)牌圖像NO.3:灰度圖像NO.4:傾斜校正NO.5:圖像二值化NO.6:擦除小塊(開(kāi)運(yùn)算:先腐蝕再膨脹)NO.7:取反NO.8
2020-04-07 20:21:55
`[ 本帖最后由 乂乂統(tǒng)天下 于 2020-3-29 14:00 編輯 ]
新手學(xué)習(xí),多多關(guān)照,互相交流,共同進(jìn)步^-^【實(shí)現(xiàn)功能】通過(guò)MATLAB編程實(shí)現(xiàn)夜間車(chē)牌位置識(shí)別、提取車(chē)牌圖像【處理效果
2020-03-28 12:40:18
)、定位到車(chē)牌位置3. IMAQ Image to Array 讀取整幅灰度或二值圖像的像素信息,類(lèi)型為U84. IMAQ ColorImageToArray 讀取整幅彩色圖像的像素信息,類(lèi)型為
2014-09-23 15:22:58
【摘要】利用投影技術(shù),針對(duì)功能磁共振時(shí)間序列圖像,介紹了一種新的自動(dòng)圖像配準(zhǔn)方法。該方法將序列圖像二值化后沿著水平方向或垂直方向進(jìn)行投影,根據(jù)投影向量元素的
2009-03-14 15:25:41 37
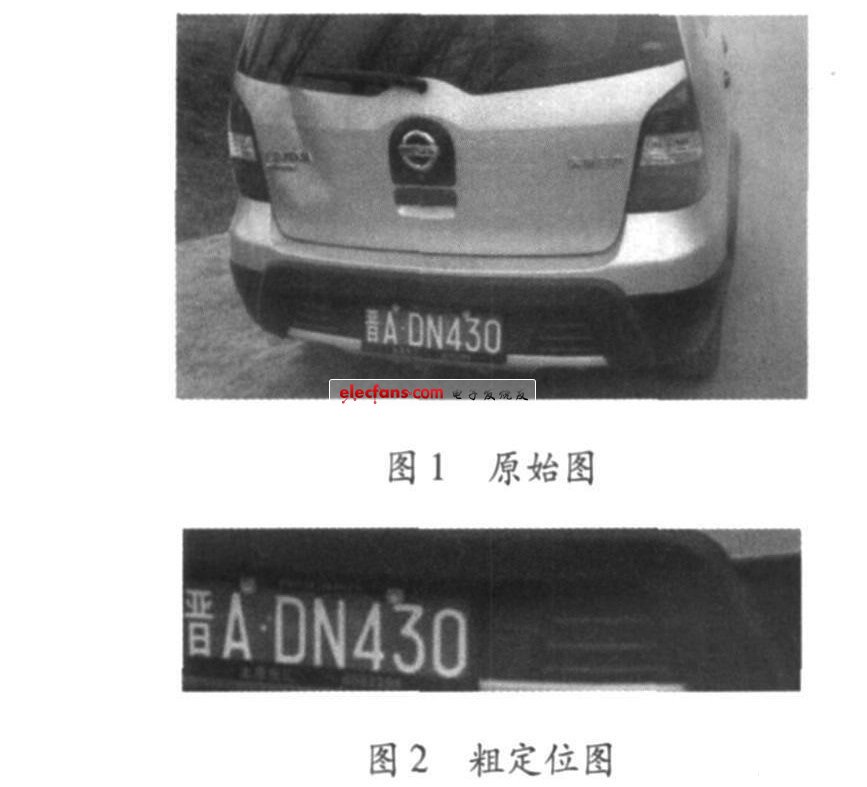
37 提出了一種新的粗定位和精細(xì)定位相結(jié)合的車(chē)牌定位方法。首先采用一種基于垂直邊緣和車(chē)牌句法的車(chē)牌粗定位算法,確定車(chē)牌候選區(qū)域,剔除偽區(qū)域,粗定位可以快速地將車(chē)牌
2009-08-13 14:23:3434 針對(duì)現(xiàn)存車(chē)牌定位方法自適應(yīng)性差和魯棒性不強(qiáng)的情況,本文提出了一種新的快速自適應(yīng)車(chē)牌定位算法.此算法結(jié)合圖象中車(chē)牌區(qū)域的紋理特征、灰度和邊緣投影信息定位車(chē)牌,經(jīng)
2009-08-26 08:19:4527 在CT 圖像重建算法研究和比較過(guò)程中,第一步工作就是獲取投影數(shù)據(jù)。本文提出了一種通過(guò)離散數(shù)據(jù)獲取投影的新方法。首先將射線等分,利用鄰近插值獲取每等分段兩個(gè)端點(diǎn)及
2009-09-26 08:21:4112 在汽車(chē)牌照識(shí)別系統(tǒng)中,車(chē)牌定位是整個(gè)識(shí)別模塊實(shí)現(xiàn)的前提,目前車(chē)牌定位的方法多種多樣,各有所長(zhǎng),但存在著速度慢或定位準(zhǔn)確率不高等問(wèn)題。文章通過(guò)比較幾種邊緣檢測(cè)
2009-12-12 13:31:5411 針對(duì)汽車(chē)牌照自動(dòng)識(shí)別系統(tǒng)中圖像效果差的問(wèn)題,本文提出了一種基于盲解卷積的增強(qiáng)算法,并給出了一種紋理和顏色分析相結(jié)合的車(chē)牌定位方法。該方法利用車(chē)牌字符具有明顯
2009-12-22 11:46:0516 本文提出了一種基于混合特征的多車(chē)牌定位的新方法,先根據(jù)車(chē)牌圖像的邊緣特征,利用數(shù)學(xué)形態(tài)學(xué)的方法生成連通區(qū)域,搜索全圖得到連通區(qū)域的最小外接矩形。然后利用我國(guó)車(chē)
2009-12-22 13:39:2010 在多投影儀曲面顯示墻幾何校正中需要用數(shù)碼相機(jī)捕獲圖像反饋信息。為了方便準(zhǔn)確地定位到每臺(tái)投影儀的投影幕,提出并實(shí)現(xiàn)了一種數(shù)碼相機(jī)自動(dòng)定位的方法。該方法利用固定
2010-01-25 14:56:1317 本文針對(duì)車(chē)牌識(shí)別系統(tǒng)在車(chē)牌圖像質(zhì)量不高時(shí)識(shí)別準(zhǔn)確率較低的問(wèn)題,提出了一種多幀圖像綜合算法,來(lái)更全面地利用車(chē)牌圖像中所含有的有用信息,以達(dá)到提高車(chē)牌識(shí)別準(zhǔn)確率的目的
2010-02-21 10:49:2419 主要針對(duì)我軍車(chē)載武器裝備定位定向的時(shí)間長(zhǎng)、精度低、自動(dòng)化程度不高等現(xiàn)狀,提出了一種采用圖像處理、數(shù)據(jù)/信息融合和軟件處理辦法來(lái)實(shí)現(xiàn)對(duì)武器裝備及火炮射向的快速定位定
2010-02-21 14:31:3021 車(chē)牌識(shí)別模塊是車(chē)牌識(shí)別(LPR)系統(tǒng)的核心。論文根據(jù)國(guó)內(nèi)汽車(chē)牌照的特點(diǎn),對(duì)車(chē)牌識(shí)別模塊中的預(yù)處理、字符分割及字符識(shí)別技術(shù)提出了改進(jìn)的算法,并基于DSP實(shí)現(xiàn)了對(duì)車(chē)牌純字符區(qū)域
2010-02-24 14:30:4042 車(chē)牌定位是車(chē)牌自動(dòng)識(shí)別技術(shù)中的一個(gè)關(guān)鍵問(wèn)題,許多學(xué)者研究發(fā)展多種車(chē)牌定位算法。簡(jiǎn)要介紹和比較了目前比較常見(jiàn)的幾種車(chē)牌定位方法進(jìn)行了。
2010-10-21 16:41:1727 針對(duì)復(fù)雜背景的車(chē)牌定位問(wèn)題,提出了一種綜合形態(tài)、顏色、投影等多種特征的車(chē)牌定位算法。基于車(chē)牌區(qū)域邊緣信息豐富的特點(diǎn),首先利用邊緣檢測(cè)和數(shù)學(xué)形態(tài)學(xué)方法定位
2010-12-10 17:50:097 圖象處理技術(shù)在車(chē)牌識(shí)別中的應(yīng)用利用數(shù)字圖象處理技術(shù)研究開(kāi)發(fā)汽車(chē)牌照自動(dòng)識(shí)別系統(tǒng)。從汽車(chē)圖象中確定車(chē)牌位置,提取車(chē)牌字符的微結(jié)構(gòu)特征,通
2009-12-08 15:21:53 841
841 
投影燈泡罷工處理方法及日常保養(yǎng)
燈泡作為投影儀中的一種重要耗材,總給人們一種非常嬌貴的印象,稍有不慎它就會(huì)“蹦出”個(gè)什么亂子來(lái)。在
2010-02-06 09:50:42312 投影儀燈泡“罷工”的快速處理方法
燈泡作為投影儀中的一種重要耗材,總給人們一種非常嬌貴的印象,稍有不慎它就會(huì)“蹦出”個(gè)
2010-02-06 10:49:58570 支持向量機(jī)的車(chē)牌定位設(shè)計(jì)方法
1 引 言
智能交通系統(tǒng)是一個(gè)熱點(diǎn)研究領(lǐng)域,受到日益廣泛的關(guān)注。車(chē)牌識(shí)別系
2010-03-08 15:11:48873 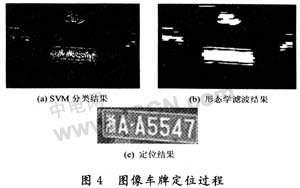
采用DSP的圖像處理在車(chē)牌識(shí)別中的設(shè)計(jì)應(yīng)用
汽車(chē)普及程度的提高,汽車(chē)牌照自動(dòng)識(shí)別系統(tǒng)(LPR)的研究與開(kāi)發(fā)也成為現(xiàn)代化交通發(fā)展中倍受關(guān)注的問(wèn)題。對(duì)提高這些場(chǎng)
2010-03-24 18:05:321848 
本內(nèi)容提供了復(fù)雜背景圖像中的車(chē)牌定位算法
2011-05-19 10:50:1747 為解決機(jī)動(dòng)車(chē)牌圖像傾斜將對(duì)其字符分割與識(shí)別帶來(lái)不利的影響,提出一種基于主元分析(PCA) 的車(chē)牌圖像傾斜校正新方法。在該方法中,PCA 被用于求取坐標(biāo)變換矩陣以進(jìn)行圖像旋轉(zhuǎn)
2011-05-25 15:14:1623 智能交通系統(tǒng)是一個(gè)熱點(diǎn)研究領(lǐng)域,受到日益廣泛的關(guān)注。車(chē)牌識(shí)別系統(tǒng)(LPR)是計(jì)算機(jī)視覺(jué)、模式識(shí)別技術(shù)在智能交通領(lǐng)域的一個(gè)重要應(yīng)用.
2011-09-28 10:20:112593 
為解決車(chē)牌識(shí)別系統(tǒng)中,車(chē)牌區(qū)域由于受到光照過(guò)度、不足和不均等復(fù)雜光照的影響,使得車(chē)牌圖像的二值化效果不理想的問(wèn)題,文中提出一種復(fù)雜光照車(chē)牌圖像的二值化新方法。根據(jù)
2011-12-06 15:05:4936 首先利用車(chē)牌的顏色特征將車(chē)牌可能區(qū)域從整幅圖像中確定,再利用水平移差掃描,邊緣檢測(cè)對(duì)圖像進(jìn)行處理,并利用投影以及車(chē)牌的長(zhǎng)寬比例相結(jié)合的方法,確定車(chē)牌具體位置。結(jié)果
2012-02-09 15:04:0124 研究了基于小波分析的車(chē)牌圖像定位、分割、大小歸一化方法,并分析了奇異值分解算法的數(shù)學(xué)原理和算法。利用奇異值分解作為代數(shù)特征提取方法,獲得圖像的有效特征描述。以Mat
2012-10-17 11:08:0128 針對(duì)現(xiàn)有車(chē)牌識(shí)別算法中的車(chē)牌定位、字符分割和字符識(shí)別三個(gè)核心模塊存在的不足, 提出了一種基于邊緣兩側(cè)顏色檢測(cè)的車(chē)牌定位方法;通過(guò)采用動(dòng)態(tài)閾值調(diào)整方法,很好的實(shí)現(xiàn)了字
2013-03-18 16:50:2723 針對(duì)含噪模糊圖像進(jìn)行圖像復(fù)原時(shí),噪聲的存在,一直影響著復(fù)原的效果。為此本文提出一種結(jié)合小波變換和模糊凸集投影的圖像復(fù)原方法。該方法通過(guò)對(duì)退化圖像進(jìn)行小波變換,引入模糊凸集投影算法來(lái)衡量其小波系數(shù)
2015-12-21 10:00:1310 復(fù)雜環(huán)境下基于角點(diǎn)回歸的全卷積神經(jīng)網(wǎng)絡(luò)的車(chē)牌定位_羅斌
2017-01-08 10:11:410 本文件主要是介紹車(chē)牌定位和人臉,有用的可以下載下來(lái)參考
2017-02-28 23:04:4416 基于數(shù)字圖像處理的奶瓶牛奶液面定位方法_馮夫健
2017-03-16 09:19:223 基于顏色信息定位車(chē)牌及其校正_賁成龍
2017-03-15 08:00:000 針對(duì)各種車(chē)牌定位算法的優(yōu)缺點(diǎn), 提出基于DCT變化的車(chē)牌定位算法, 該方法在DCT 數(shù)據(jù)中,提取出一種基于加權(quán)頻率的車(chē)牌區(qū)新特征, 然后經(jīng)過(guò)自適應(yīng)閾值分類(lèi), 采用基于投影法的車(chē)牌區(qū)分割方法, 直接
2017-09-06 09:47:194 車(chē)牌識(shí)別(LPR)技術(shù)是計(jì)算機(jī)視覺(jué)、圖像處理技術(shù)與模式識(shí)別技術(shù)的融合,是智能交通系統(tǒng)中一項(xiàng)非常重要的技術(shù)。一般說(shuō)來(lái),車(chē)牌識(shí)別前期的處理技術(shù)至關(guān)重要,其前期技術(shù)包括:車(chē)牌的定位、車(chē)牌圖像的二值化及字符分割。本文主要針對(duì)車(chē)牌定位算法進(jìn)行研究。
2017-09-06 15:14:246 是LPR的一項(xiàng)關(guān)鍵技術(shù)。常見(jiàn)的車(chē)牌定位技術(shù)主要有:邊緣檢測(cè)法[2]、投影法[3]、神經(jīng)網(wǎng)絡(luò)法[4]、數(shù)學(xué)形態(tài)學(xué)法[5]、基于彩色圖像的定位算法[6]。邊緣檢測(cè)法對(duì)車(chē)牌圖像邊框的連續(xù)性要求較高;神經(jīng)網(wǎng)絡(luò)方法計(jì)算量大,且要求
2017-09-07 10:37:156 DM6446的車(chē)牌定位快速算法實(shí)現(xiàn)與優(yōu)化
2017-10-26 15:27:051 識(shí)別理論,對(duì)含有汽車(chē)牌照的圖像進(jìn)行分析處理,從而確定汽車(chē)牌照在圖像中的位置,并進(jìn)一步提取和識(shí)別出文本字符。從不同車(chē)牌圖像中分割出的字符圖像各式各樣,尺寸變化范圍大,增加了識(shí)別的難度。盡管可以采用圖像變換方法將分
2017-11-14 17:53:174 針對(duì)現(xiàn)有車(chē)牌定位系統(tǒng)中采集到的圖像質(zhì)量較低的特點(diǎn),提出了一種基于小波變換和Tophat變換的車(chē)牌定位算法來(lái)增強(qiáng)圖像對(duì)比度、抑制背景以提高車(chē)牌識(shí)別的準(zhǔn)確率。首先,以小波變換為工具,結(jié)合反銳化掩模(UM
2017-11-15 15:46:446 對(duì)于一個(gè)城市來(lái)說(shuō),車(chē)輛的多少可以衡量這個(gè)城市的重要性和地位,那么車(chē)牌識(shí)別實(shí)現(xiàn)的方式有哪些,車(chē)輛牌照的識(shí)別是基于圖像分割和圖像識(shí)別理論,對(duì)含有車(chē)輛號(hào)牌的圖像進(jìn)行分析處理,從而確定牌照在圖像中的位置
2017-11-20 11:34:1715 的,實(shí)時(shí)、準(zhǔn)確、高效的綜合交通運(yùn)輸管理系統(tǒng)。本文為大家介紹智能交通中的車(chē)牌定位及GPS定位案例的設(shè)計(jì)。 智能交通:汽車(chē)車(chē)牌定位識(shí)別完整設(shè)計(jì) 本項(xiàng)目擬充分發(fā)掘FPGA并行運(yùn)算在圖像處理領(lǐng)域的優(yōu)勢(shì),實(shí)現(xiàn)基于Adboost算法的車(chē)牌檢測(cè)
2017-11-20 15:53:278 ;而FPGA則與CPU相反,其并行的結(jié)構(gòu)會(huì)使圖像處理算法簡(jiǎn)單的部分變得十分高效,因此,在圖像采集與預(yù)處理過(guò)程中涉及到的一些簡(jiǎn)單的算法如果利用FPGA來(lái)實(shí)現(xiàn)的話將會(huì)使整個(gè)圖像采集與處理的時(shí)間大大減少。 汽車(chē)車(chē)牌的定位識(shí)別需要對(duì)攝像
2017-11-20 16:28:1913 一、項(xiàng)目背景及可行性分析 2.1 項(xiàng)目背景及技術(shù)難點(diǎn) 項(xiàng)目名稱(chēng):智能交通:汽車(chē)車(chē)牌定位識(shí)別; 項(xiàng)目?jī)?nèi)容:本項(xiàng)目是在FPGA前端實(shí)時(shí)完成圖像采集、預(yù)處理、車(chē)牌定位和字符分割以及數(shù)據(jù)傳輸工作,在后端完成
2017-11-20 17:15:514 人臉識(shí)別是生物特征識(shí)別的重要組成部分,而人眼是人臉最突出的特征之一,眼睛定位成為人臉識(shí)別的關(guān)鍵環(huán)節(jié)。積分投影法是一種常用的人眼定位方法,但直接采用此方法進(jìn)行人眼定位時(shí),由于眉毛與眼睛距離較近,容易
2017-11-22 17:41:502 是LPR的一項(xiàng)關(guān)鍵技術(shù)。常見(jiàn)的車(chē)牌定位技術(shù)主要有:邊緣檢測(cè)法[2]、投影法[3]、神經(jīng)網(wǎng)絡(luò)法[4]、數(shù)學(xué)形態(tài)學(xué)法[5]、基于彩色圖像的定位算法[6]。邊緣檢測(cè)法對(duì)車(chē)牌圖像邊框的連續(xù)性要求較高;神經(jīng)網(wǎng)絡(luò)方法計(jì)算量大,且要求
2017-11-26 10:23:120 為解決類(lèi)似車(chē)牌和失真車(chē)牌的定位難題,提出一種基于分類(lèi)器投票的車(chē)牌定位方法。方法從兩個(gè)方面提升車(chē)牌定位精度:首先,針對(duì)類(lèi)似車(chē)牌和失真車(chē)牌的圖像特點(diǎn),提出兩種新的車(chē)牌圖像描述子,針對(duì)性地提升兩類(lèi)車(chē)牌
2017-11-29 11:32:305 汽車(chē)牌照的自動(dòng)識(shí)別技術(shù)有重要的應(yīng)用價(jià)值,是智能交通系統(tǒng)ITS(Intelligent Traffic System)的關(guān)鍵技術(shù)之一。牌照識(shí)別系統(tǒng)中圖像的獲取一般通過(guò)固定架設(shè)在通道上方及兩旁的CCD
2017-11-30 11:31:550 車(chē)牌識(shí)別(LPR)技術(shù)是計(jì)算機(jī)視覺(jué)、圖像處理技術(shù)與模式識(shí)別技術(shù)的融合,是智能交通系統(tǒng)中一項(xiàng)非常重要的技術(shù)。一般說(shuō)來(lái),車(chē)牌識(shí)別前期的處理技術(shù)至關(guān)重要,其前期技術(shù)包括:車(chē)牌的定位、車(chē)牌圖像的二值化及字符
2017-11-30 11:41:330 車(chē)牌字符識(shí)別是智能車(chē)牌識(shí)別系統(tǒng)中的重要組成部分。針對(duì)車(chē)牌字符類(lèi)別多、背景復(fù)雜影響正確識(shí)別率的問(wèn)題,提出了一種基于卷積神經(jīng)網(wǎng)絡(luò)(CNN)的車(chē)牌字符識(shí)別方法。首先對(duì)車(chē)牌字符圖像進(jìn)行大小歸一化
2017-11-30 14:24:3621 隨著交通管理系統(tǒng)的日趨現(xiàn)代化,車(chē)牌自動(dòng)識(shí)別系統(tǒng)成為智能交通系統(tǒng)的重要組成部分。通過(guò)對(duì)當(dāng)前車(chē)牌識(shí)別的基本原理和主要方法的研究,分析比較各種識(shí)別方法的優(yōu)缺點(diǎn),針對(duì)車(chē)牌定位、字符分割和字符識(shí)別,本文提出
2017-12-01 11:49:331 作為主要技術(shù)手段,利用車(chē)牌的字符紋理和顏色特征生成候選車(chē)牌;在假設(shè)檢驗(yàn)階段,使用灰度投影作為技術(shù)手段,利用車(chē)牌結(jié)構(gòu)的固有特征驗(yàn)證候選并實(shí)現(xiàn)定位。實(shí)驗(yàn)結(jié)果表明:在包含實(shí)際場(chǎng)景的車(chē)牌圖像庫(kù)中,定位成功率可以達(dá)到
2017-12-18 13:37:042 目前,最常見(jiàn)的對(duì)車(chē)牌的定位和識(shí)別基本還是依賴(lài)圖像識(shí)別,檢測(cè)到車(chē)牌號(hào)后與數(shù)據(jù)庫(kù)中的名單進(jìn)行比對(duì)處理,但是圖像識(shí)別受環(huán)境因素影響大,識(shí)別車(chē)牌容易出錯(cuò),而且在采集圖像時(shí)也經(jīng)常會(huì)出現(xiàn)盲區(qū),這些不可控的因素限制了圖像識(shí)別的進(jìn)一步發(fā)展。
2018-04-20 11:13:001862 分享到 提到 智能電子車(chē)牌 ,很多人都會(huì)感到好奇,在這里就要給大家科普一下什么是智能電子車(chē)牌以及未來(lái)的發(fā)展趨勢(shì)。 目前,最常見(jiàn)的對(duì)車(chē)牌的定位和識(shí)別基本還是依賴(lài)圖像識(shí)別,檢測(cè)到車(chē)牌號(hào)后與數(shù)據(jù)庫(kù)中的名單
2018-05-26 14:33:00926 提到智能電子車(chē)牌,很多人都會(huì)感到好奇,在這里就要給大家科普一下什么是智能電子車(chē)牌以及未來(lái)的發(fā)展趨勢(shì)。目前,最常見(jiàn)的對(duì)車(chē)牌的定位和識(shí)別基本還是依賴(lài)圖像識(shí)別,檢測(cè)到車(chē)牌號(hào)后與數(shù)據(jù)庫(kù)中的名單進(jìn)行比對(duì)處理
2018-06-13 09:37:008003 
車(chē)牌識(shí)別(LPR)技術(shù)是計(jì)算機(jī)視覺(jué)、圖像處理技術(shù)與模式識(shí)別技術(shù)的融合,是智能交通系統(tǒng)中一項(xiàng)非常重要的技術(shù)。一般說(shuō)來(lái),車(chē)牌識(shí)別前期的處理技術(shù)至關(guān)重要,其前期技術(shù)包括:車(chē)牌的定位、車(chē)牌圖像的二值化及字符分割。本文主要針對(duì)車(chē)牌定位算法進(jìn)行研究。
2020-05-29 08:03:002240 
車(chē)牌識(shí)別(LPR)系統(tǒng)是以圖像處理、模式識(shí)別等技術(shù)為基礎(chǔ)的智能識(shí)別系統(tǒng),通過(guò)攝像機(jī)所拍攝道路上行駛的車(chē)輛圖像進(jìn)行車(chē)牌號(hào)碼的識(shí)別。
2019-06-27 09:35:164182 以汽車(chē)牌照的識(shí)別為例,具體研究了車(chē)牌自動(dòng)識(shí)別的原理。整個(gè)處理過(guò)程分為預(yù)處理,邊緣提取,車(chē)牌定位,字符分割和字符識(shí)別五大模塊,用MATLAB軟件編程來(lái)實(shí)現(xiàn)每一個(gè)部分,最后識(shí)別出汽車(chē)牌照。在研究的同時(shí)對(duì)其中出現(xiàn)的問(wèn)題進(jìn)行了具體分析和處理。尋找出對(duì)于具體的汽車(chē)牌照識(shí)別過(guò)程的最好的方法.
2020-08-26 17:13:0515 Johnny C. Lee在它的論文中介紹他使用基于投影儀進(jìn)行定位跟蹤的系統(tǒng)的原理。在投影儀投送的圖像中包含著不易覺(jué)察的灰度變化的編碼信息。可以被投影區(qū)內(nèi)的光電管檢測(cè)到這些編碼信息時(shí)間序列,從而確定
2020-10-10 09:58:352369 
本文主要研究基于 STM32 單片機(jī)的車(chē)牌識(shí)別系統(tǒng),以 STM32F103RBT 單片機(jī)為主控芯片,控制攝像頭進(jìn)行圖像采集,并將結(jié)果顯示在顯示屏上。車(chē)牌識(shí)別系統(tǒng)工作流程包括圖像采集、圖像預(yù)處理、車(chē)牌定位、字符分割、字符識(shí)別 5 個(gè)基本步驟。
2020-10-16 08:00:0054 圖像細(xì)節(jié)。 FPGA圖像處理方法 1、圖像增強(qiáng) 兩大方法:空間域方法和時(shí)間域方法(以后再詳述) 2、圖像濾波 (1)平滑空間濾波器 (2)中值濾波算法 3、圖像邊緣檢測(cè) 邊緣指圖像局部強(qiáng)度變化最顯著的部分。邊緣主要存在與目標(biāo)與目
2020-12-25 14:15:223065 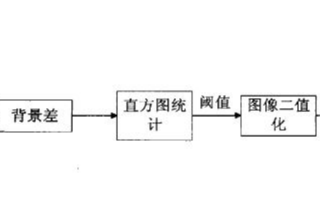
的車(chē)牌定位方法:基于灰度圖像的車(chē)牌定位方法、基于小波變換的車(chē)牌定位方法、基于形態(tài)學(xué)的車(chē)牌定位方法、基于神經(jīng)網(wǎng)絡(luò)的車(chē)牌定位方法、基于支持向量機(jī)的車(chē)牌定位方法等。雖然這些算法在某些特定條件下識(shí)別效果較好
2021-04-13 10:48:594137 
一、投影 水平投影有什么作用呢? 可以起到一個(gè)定位的作用,比如說(shuō),我們想要定位車(chē)牌號(hào)。我們把圖像處理之后,用垂直投影,可以很快的對(duì)其進(jìn)行定位以即分割 水平投影的實(shí)現(xiàn)步驟 圖像二值化,物體為黑,背景
2021-04-26 14:34:091363 可以起到一個(gè)定位的作用,比如說(shuō),我們想要定位車(chē)牌號(hào)。我們把圖像處理之后,用垂直投影,可以很快的對(duì)其進(jìn)行定位以即分割
2021-04-26 14:30:391366 稀疏投影CT重建圖像的條形偽影解決方法
2021-06-18 11:43:055 圖像反向投影的最終目的是獲取ROI然后實(shí)現(xiàn)對(duì)ROI區(qū)域的標(biāo)注、識(shí)別、測(cè)量等圖像處理與分析,是計(jì)算機(jī)視覺(jué)與人工智能的常見(jiàn)方法之一。圖像反向投影通常是彩色圖像投影效果會(huì)比灰度圖像效果要好,原因在于彩色
2022-05-31 10:31:54739 畫(huà)面中的車(chē)牌號(hào)碼信息經(jīng)常模糊不清難以辨識(shí)
這個(gè)時(shí)候就需要借助**專(zhuān)業(yè)圖像處理方法**來(lái)改善模糊車(chē)牌圖像的號(hào)碼可辨識(shí)性
2023-02-08 15:48:302887 
摘要:車(chē)牌識(shí)別系統(tǒng)在生活中的使用越發(fā)廣泛,占據(jù)重要地位。車(chē)牌識(shí)別一共分為圖像處理和字符識(shí)別兩部分。本文首先使用OpenCV技術(shù)定位車(chē)牌、分割車(chē)牌,接著應(yīng)用Tensorflow識(shí)別車(chē)牌字符。每個(gè)
2023-07-20 14:57:390 對(duì)原始獲取圖像進(jìn)行一系列的運(yùn)算處理,稱(chēng)為圖像處理。圖像處理是機(jī)器視覺(jué)技術(shù)的方法基礎(chǔ),包括圖像增強(qiáng)、邊緣提取、圖像分割、形態(tài)學(xué)處理、圖像投影、配準(zhǔn)定位和圖像特征提取等方法。
2023-10-20 10:17:34313 
對(duì)原始獲取圖像進(jìn)行一系列的運(yùn)算處理,稱(chēng)為圖像處理。圖像處理是機(jī)器視覺(jué)技術(shù)的方法基礎(chǔ),包括圖像增強(qiáng)、邊緣提取、圖像分割、形態(tài)學(xué)處理、圖像投影、配準(zhǔn)定位和圖像特征提取等方法。
2023-10-23 10:43:08193 
一、圖像處理技術(shù)概述1.定義對(duì)原始獲取圖像進(jìn)行一系列的運(yùn)算處理,稱(chēng)為圖像處理。圖像處理是機(jī)器視覺(jué)技術(shù)的方法基礎(chǔ),包括圖像增強(qiáng)、邊緣提取、圖像分割、形態(tài)學(xué)處理、圖像投影、配準(zhǔn)定位和圖像特征提取等方法
2023-10-26 08:07:47387 
圖像細(xì)節(jié)。 FPGA 圖像處理方法 1、圖像增強(qiáng) 兩大方法:空間域方法和時(shí)間域方法(以后再詳述) 2、圖像濾波 (1)平滑空間 濾波器 (2)中值濾波 算法 3、圖像邊緣 檢測(cè) 邊緣指圖像局部強(qiáng)度變化最顯著的部分。邊緣主要存在與目標(biāo)與
2023-12-02 13:15:02492
 電子發(fā)燒友App
電子發(fā)燒友App












 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論