
 一文解析特斯拉無人駕駛技術原理(最全解析)
一文解析特斯拉無人駕駛技術原理(最全解析)
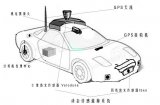
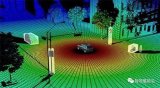
美國當地時間10月19日,Tesla發布聲明稱,包括還未上市的Model 3在內,目前工廠在產的特斯拉汽車都將全部配備能夠實現完全自動駕駛(full self-driving capability)的硬件。其中,包括8個車身周圍的攝像頭,12個最新的超聲波傳感器,1個增強版前向毫米波雷達以及處理能力將比上一代高40倍的車載計算設備NVIDIA’s Drive PX 2,其作用及安裝位置如表1與圖1所示。特斯拉想借此實現以下公司愿景:
為所有人提供比人類駕駛更高的行車安全;
為車主提供更低的交通成本;
為無車之人提供低價、按需的出行服務。
無人駕駛技術的幾大層面

按照美國高速公路安全管理局(NHTSA)的分級,自動駕駛系統可以分為五個不同的等級:
第零級:車輛完全沒有任何的自動駕駛,駕駛員對車輛完全掌控;
第一級:車輛具備至少一種基本的電子輔助系統;
第二級:車輛具備至少兩種電子輔助系統,能夠幫助駕駛員減輕駕駛工作;
第三級:車輛具備足夠信賴的自動駕駛能力,但關鍵時刻駕駛員仍然對車輛具有操控權;
第四級:駕駛員對車輛不具有操控權力,僅需輸入目的地或導航資料便能完成整個旅程。
目前,主流水平的無人駕駛處在第二與第三階段之間,而特斯拉的無人駕駛技術則處在第三階段,因為特斯拉并未達到第四階段所說的車輛可以監控安全相關的駕駛功能。
特斯拉的無人駕駛原理
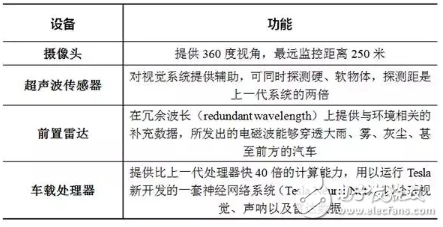
表1 Tesla所配硬件及其功能
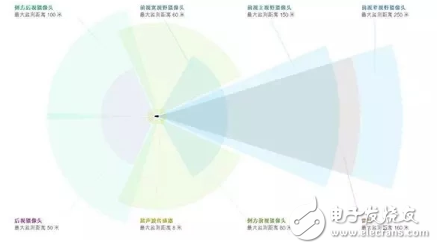
圖1 Tesla所配硬件的安裝位置
在Tesla創始人Elon Musk的看來,“每年交通事故造成全球死亡人數高達120萬,其中美國人有3萬多人。汽車實現全自動駕駛的基礎已經具備,且其安全性至少是人類駕駛員的2倍以上,既然如此為什么不加速這個進程呢?”從理論上講,這是有道理的,因為汽車上安裝的傳感器能夠不知疲倦地實時捕捉汽車周圍人類無法察覺到的大量信息,由車載計算設備及時處理后以人類無法觸及的速度做出反應。但事實上,由于今年5月美國佛羅里達州的一位Tesla車主在使用Autopilot時發生車禍不幸生亡,普通民眾對Tesla Autopilot系統并不十分信任。
一路既往地,Tesla全自動駕駛的這條新聞一經發布,便在全世界范圍內引起熱議。在Tesla的擁躉看來,Elon Musk是精明而有遠見的企業家,而在批評家及競爭對手(主要是傳統車企)眼中,Musk的部分決策過于冒險甚至有些膽大妄為(reckless):Elon Musk給自己設置的研制能夠從洛杉磯自動行駛到紐約的無人駕駛汽車的最終期限是2017年年底之前,而福特、通用與Google都是2021年,百度則為2019年,由此可見Musk的雄心和激進。
如今該新聞已經過去近10多天,喧囂已經過去大半。如果再仔細分析一下Tesla官方發布的文件及權威媒體的報道,我們就會發現其實Elon Musk所做出的每一個決策,其背后都是有科學依據和理性思考作為支撐的,而且正好都體現了硅谷IT企業所具有的典型思維方式和硅谷企業家改變世界的情懷。
Tesla硬件配置中為什么沒有采用激光雷達?
在硅谷有一個明確的做事原則,即要最大限度地采用便宜的資源,盡可能節省寶貴的資源,該做法最初是受由香農第一定律引出的霍夫曼編碼(即)的啟發得來的,在經濟學上被稱為“吉爾德定律”(Gilder’s Law)。例如,由于摩爾定律的作用,集成電路芯片上所集成的晶體管的數目每隔18個月翻一倍(如圖2所示),反過來看便是相同性能微處理器的成本每隔18個月降一半,這是一種較便宜的資源。因此,類似于Google和Facebook這樣的IT巨頭必然將越來越多原本由工程師這種較昂貴的資源來完成的工作交給計算機來完成,以降低總的辦公成本。
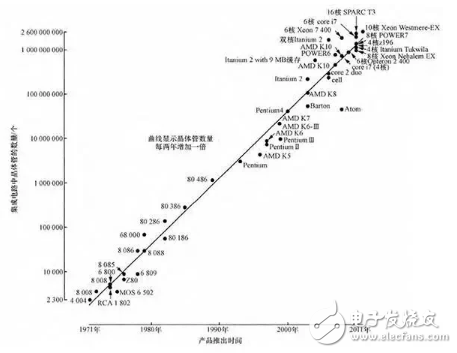
圖2 微處理器中晶體管數量變化與摩爾定律
具體到Tesla全自動駕駛系統采用“攝像頭+40倍計算能力”的方案而不是像Google、Uber那樣使用激光雷達(Light Detection And Ranging,LiDAR)而言,亦可用“吉爾德定律”來解釋。如圖3所示,在摩爾定律的作用下,計算能力的成本隨時間以較陡的曲線下降,而機械旋轉式激光雷達和機械制造部件的成本對時間并不敏感,幾乎只能由于大規模生產所產生的規模效應而降低。
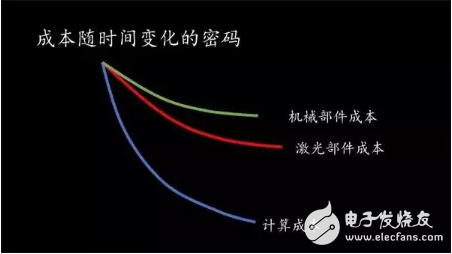
圖3 無人駕駛汽車各部件的成本隨時間的變化(取自馭勢科技)
由于Tesla的汽車已經量產,成本的控制對銷量的提升便是至關重要的。相對應地,Google與Uber的無人駕駛汽車目前還只是處于測試階段,幾百輛的規模即便全部配置8萬美元的激光雷達也花不了多少錢。所以,Tesla “低成本感知+高性能計算”的選擇是對于Tesla短期控制整車成本是十分合理的。
雖然Elon Musk在多個場合表示:“I‘m not a big fan of LiDAR, and I don’t think it makes sense in this context.(我不是激光雷達的支持者,我并不認為它對于無人駕駛汽車是絕對必要的)”,但考慮到當年比爾-蓋茨在微軟的DOS系統與蘋果公司的“視窗+鼠標”系統競爭時也表達過類似的態度卻在背地里偷偷地研發Windows 3.0系統的行為,我們可以將Musk的話理解為對媒體和用戶的洗腦,用自己的個人威信給Tesla解決方案的安全性背書,目的是為激光雷達價格地下降爭取時間,因為包括Velodyne和Quanergy等公司成熟的固態激光雷達產品正在研制中,據這兩家公司的公開信息,其成本可降低到250美元以下。
但是,激光雷達對于保證無人駕駛汽車99.9999%+的行車安全依然是十分必要的,按照普林斯頓大學肖建雄博士的說法:“我非常懷疑,Tesla有一種不使用激光雷達的安全解決方案,激光雷達是唯一一種能實現100%安全的解決方案。”所以,我們有理由相信,等到固態激光雷達的成本降低到100~200美元,Elon Musk的態度會來一個180度大轉變,在Tesla的無人駕駛汽車上配置激光雷達。據網友在Twitter上曝光的、在加州道路上拍攝到的車頂裝有激光雷達Tesla正在道路上測試的照片,由此可以一窺Musk的真實想法。
另外,值得一提的時,在PC時代有所謂的基于“安迪-比爾定律”構成的Win-Tel體系,用以概括PC時代“比爾-蓋茨的Windows操作系統與各軟件廠商一起升級軟件,致使Intel CEO安迪-格魯夫生產的上一代處理器性能不夠用,逼迫用戶購買配置了新一代Intel處理器的計算機”的現象。類似地,智能手機時代有類似的“谷歌安卓系統-高通手機芯片”構成的Android-Qualcomm體系。汽車工業目前并沒有類似的規律作支撐,但考慮到汽車的平均使用壽命一般為10年左右,是PC與智能手機的5倍,所以,Tesla選擇比上一代性能強大40倍(2^5=32)的車載計算設備,似乎在預示著Elon Musk有意締造無人駕駛汽車時代的Tesla-NVIDIA體系?
Tesla為什么采用OTA的方法升級軟件?
在不久前舉行2016中國汽車工程學會年會(SAECCE 2016)的分會討論中,地平線機器人科技創始人余凱博士提到,“Tesla先把硬件系統裝上去,然后逐步升級軟件的做法,已經在上一代Autopilot中實踐過了【注:如圖4所示,特斯拉定期通過無線網絡更新其汽車軟件,以提高性能和修復安全漏洞。多年來,它一直在使用這些所謂的無線軟件更新(Over-The-Air Software Update,OTA)。之前這種巧妙的設計能使特斯拉即使在汽車出廠之后依然能夠依據反饋到云端的數據,即時做出反應,不斷提升性能和用戶體驗】。但是,這種做法對于傳統車企來說,依然是不可想象的。”與余凱博士持類似觀點,Fortune雜志也評論道:“Loading cars with hardware that might not be used for years—and requires a software download to unlock the features—is unprecedented in the industry.(在汽車上預先搭載可能多年都不會使用的硬件,并且需要通過更新軟件來解鎖新功能,這在汽車行業是前所未有的)。”

圖4 Tesla OTA升級歷史(取自汽車之家)
正如上汽集團總工程師程驚雷在SAECCE 2016評價車企與IT企業的不同之處時說到的,“汽車企業都是牛頓的學生,而IT企業都是香農的學生”,傳統車企的做法的科學基礎是由起始于17世紀的牛頓力學經過300多年演化而來的“機械思維”。基于機械思維的一切決策都是以確定性或還原論為前提的,具體的做法是要做到算無遺策,所有可能的情形都要提前預料到并做好應對措施,爭取一次做成功,如果一個環節沒有想到,后果就是災難性的。最典型的例子便是基于泰勒科學管理的流水線生產模式,20世紀初,亨利-福特便是用此大批量制造生產汽車的:
首先將復雜的產品分解成簡單的部分,分別加以設計與制造,即2=1+1;
一個過程的結果是可預測的,在生產線的起點放入相應的零件,經過這個流水線的組裝,一定可以得到所想要的產品,即1+1=2;
上述過程,類似于將初始參數帶入牛頓力學方程后,一定可以計算出物體的運動軌跡,一切都是確定的、可還原分解的。
但是隨著科學的發展,科學家們發現,這個世界并不是確定的。不論是有法國數學家龐加萊(Henri Poincaré)在三體問題、美國氣象學家洛倫茲(Edward Lorenz)在天氣預報等宏觀世界中發現的混沌現象,還是有物理學家海森堡(Werner Heisenberg)在微觀世界中發現的測不準原理,都表明:這個世界在大部分情況下是不可預測的(即1+1≠2)。
基于這個世界是不確定的前提,在第二次世界大戰中,美國數學家維納(Norbert Wiener)和香農(Claude Shannon)各自逐步發明了一套新的方法論,即控制論和信息論。而直到第二次世界大戰結束才真正開始發展的硅谷和以色列則跳過了指導了前兩次工業革命的牛頓力學和機械思維,直接接受了這套新的方法論,避免了歷史包袱,從而成為了全世界IT創新創業最活躍的地區。
香農的信息論,可以簡單地理解為利用信息消除不確定性(即信息熵),現在提的比較多的“大數據思維”本質上是香農的信息論。而維納的控制論,可以簡單地理解為根據反饋不斷進行調整輸出,而放棄對未來做過多的預測,因為隨機性無處不在。在Google內部,產品經理們都遵循這樣一個規則:在沒有數據之前,不要給出任何結論。這正好體現了信息論與控制論的思維方式。吳軍博士在《智能時代》中提到:“人類在機器智能領域的成就,其實就是不斷地把各種智能問題轉化成消除不確定性的問題,然后再找到能夠消除相應不確定性的信息,如此而已。”不論是Google在線廣告與用戶的高度匹配,還是Nate Siliver準確預測出2012年美國大選所有50個州及華盛頓特區的結果,皆是如此。
具體到無人駕駛汽車而言,最先研制出的Google的做法也體現了“利用信息消除不確定性”并在此基礎上“根據反饋不斷進行調整輸出”的原則——Google無人車是Google街景項目的延伸,只能在街景車掃過的、具有大量數據積累的地方行駛,Google工程師根據測試的結果離線調整程序。而當Google的無人駕駛大數據具有了完備性,即覆蓋了所有可能的情況時,不確定性就被完全消除了,無人駕駛汽車就實現了100%的安全。但事實上,這對Google而言比較困難,因為其在測的無人車數量比較少,只有幾百臺。據華爾街日報美國當地時間10月5日報道,Google宣布自己的無人駕駛汽車剛剛完成200萬英里道路行駛里程。從2010年紐約時報曝光Google無人車算起,時間經過了6年。而由于搭載Tesla Autopilot的汽車數量大了兩個量級,Elon Musk幾天后在個人Twitter上宣布:Tesla Autopilot發布后的1年中累計行駛里程已達到2.22億英里。因此,Tesla更有機會先達到大數據的完備性。
當然,實現大數據完備性不可能是一蹴而就的。如果汽車工況也如自然界和社會中的許多現象一樣,遵循帕累托分布(即冪律),則圖4中綠色部分表示的經常發生的少數工況占所有工況發生次數的絕對比重(如80%以上),而不經常發生的大量工況則分布在圖中黃色的長尾中。但由于汽車保有量的基礎達到億輛級別,長尾中的小概率工況乘以10^9后,發生的次數也是驚人的。而要覆蓋長尾中的小概率工況,需要積累比80%經常發生的工況多得多的行駛里程,比如后者需要積累100萬公里,前者可能需要積累100億公里里程,相似的例子可以在搜索引擎中找到。細心的用戶可能會發現,對于常見的關鍵詞搜索,比如“人工智能”,Google和微軟Bing搜索的結果差不多,但是遇到偏僻的關鍵詞,如“倫勃朗早期作品”,由于Google長期積累的數據足夠訓練出這些“長尾搜索”的點擊模型,它的結果要比Bing要準確的多。
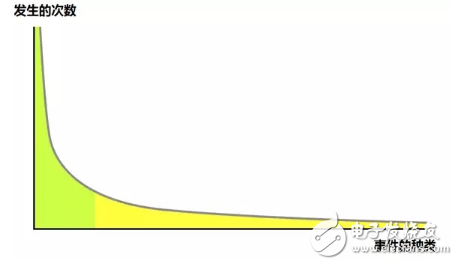
圖5 帕累托分布
Tesla作為一家誕生于硅谷并自詡為“IT公司”的汽車企業,自然深諳上述道理——產品在達到一定水準后,只有通過先上線,得到反饋,然后再修改,才能完善,那種一次性設計開發一個完美的產品的做法,在未知因素過多的情況下,幾乎不可能做到。其OTA(Over-The-Air)升級軟件系統的做法,即Tesla官方文件中聲稱的“Before activating the features enabled by the new hardware, we will further calibrate the system using millions of miles of real-world driving to ensure significant improvements to safety and convenience.(在啟用由新硬件激活的新功能之前,我們將使用數百萬英里的真實駕駛里程進一步校準系統,以確保顯著提高安全性和便利性)”,體現了“利用信息消除不確定性”及“根據反饋不斷調整輸出”的思維方式:Tesla會針對出現的小概率新工況,做出相應的反應,及時制定應對措施,這完全不同于傳統車企的做法。
通常情況下,車企試圖在研發階段就提前預測到一切可能的情形,然后在開發的過程中予以解決。對傳統車企而言,在汽車離開流水線的一剎那,兩者之間的聯系就被切斷了,車企對于汽車的運行狀況其實是一無所知的。汽車廠商對數據并不關注,并不會像通用電氣那樣認真地收集航空發動機每次飛行所產生的數據,將提煉出的寶貴信息用于下一代產品的開發。例如,在汽車出廠之后,根據每一個車主的不同駕駛習慣和形式工況的數據,汽車廠商能夠做到修改標定過的內燃機MAP圖以提升經濟性或動力性嗎?并不能!因為傳統車企本質上是基于牛頓力學的,并不關注不確定性和個性化。
就研發無人駕駛汽車而言,傳統車企那種想保證完全安全之后再發布新車的做法是行不通的,因為長尾中的小概率工況只有通過收集大量的數據,以OTA的方式才能逐步覆蓋,正如Tesla所做的那樣。值得一提的是,只要汽車的被動安全技術做到位,Tesla這種看似比較激進的做法并不會導致無法挽回的結果,但卻可以實實在在地在整體上提升行車的安全性。
Tesla全自動駕駛系統的商業模式是什么?
無人駕駛汽車可算是一種新技術,而一種新技術想要對整個社會產生積極正面的影響,需要有相應的商業模式配合。就之前的汽車行業而言,傳統車企的商業模式百年來基本沒有大改,大致可以歸納為:由零部件廠商供應零部件給整車制造商,再由后者向銷售網絡中的經銷商提供汽車產品,經銷商從事賣車、維修等服務,再配以金融服務商提供如車貸、車險之類的汽車金融服務。
這從圖6所示的傳統車企與像Tesla這樣的科技公司在資本性支出與企業人才的結構分布上就可見一斑。前者較注重硬件開發與制造這種對生產資料和金融資本要求很高但邊際成本也很高的生產活動,這也符合第二次工業革命中誕生的企業的特點;后者更偏重軟件開發這種對人力資本要求很高同時邊際成本很低的研發工作,同樣這也符合信息革命中誕生的企業的特點。由此造成的結果便是:汽車企業中毛利潤率最高分豐田也不過15%,而硅谷的科技公司的毛利率普遍在60%~70%以上。

圖6 汽車制造商與科技公司在資本性支出與企業人才的結構分布上的比較
或許是看出上述傳統汽車工業的“阿基里斯之踵”,Elon Musk為Tesla無人駕駛汽車設計的商業模式,除了傳統的汽車銷售之外,還有交通出行服務提供商,即Tesla Network,而后者與Uber的主營業務是重疊的。在Tesla的官方文件中是這樣表述的:
“…Please note also that using a self-driving Tesla for car sharing and ride hailing for friends and family is fine, but doing so for revenue purposes will only be permissible on the Tesla Network, details of which will be released next year.”【也請注意,使用無人駕駛Tesla進行汽車共享或為朋友和家人提供專車服務當然是可以的,但想借此盈利的話,將只被允許通過特斯拉網絡(Tesla Network)來實現,其相關細節將在明年發布。】
如果關注一下行業內其它專業人士在公開場合表達過的觀點,就會發現持有類似看法——對用戶而言,重要的不是擁有汽車的產權,而是使用權;對企業而言,相比于直接擁有大量固定資產,在當下掌控事物之間的連接關系或許更易成功——并不只有Musk一人。
汽車租賃行業鼻祖Zipcar的創始人羅賓-蔡斯(Robin Chase)于8月10日在Medium上發文《Self-Driving Cars Will Improve Our Cities. If They Don’t Ruin Them》,指出汽車共享將給交通與就業帶來巨變,政府應提前做好預案;
進入汽車共享領域比Uber更早的Lyft的聯合創始人大衛-齊默(David Zimmer)于9月18日在Medium上發文《The Third Transportation Revolution》,描繪了無人駕駛汽車共享這種商業模式將帶來的“正外部性”;
Google無人車之父塞巴斯蒂安-特龍(Sebastian Thrun)在10月29日的知乎Live中再次表達了“Transportation as a Service”(出行及服務)的觀點,即按需使用出行服務但并不購買汽車。
McKinsey與Bloomberg New Energy Finance在10月初發布的《An Integrated Perspective on the Future of Mobility》報告中,也將共享無人駕駛汽車作為主要的交通方式之一,如圖6所示。
圖6 麥肯錫眼中的城市交通模式之一:無縫交通系統(Seamless Mobility)
如果Tesla Network真將得到有力執行,那么Tesla與Uber之間早晚會有一戰,且雙方的優勢都來源于目前各自手中所掌握的大數據——Tesla擁有更多道路行駛里程數據,Uber擁有更多用戶出行習慣數據——并正在或有意圖把手升到對方的地盤中——Tesla有意開展汽車出行服務,而Uber正致力于開發Level 4以上的無人駕駛汽車——爭奪出行網絡中的樞紐節點的地位(如同Google之于互聯網、Facebook之于社交網絡),以此壟斷萬億美元的出行市場,孰勝孰負遠未明了。




































 工商網監
工商網監
評論