PID,就是“比例(proportional)、積分(integral)、微分(derivative)”,是一種很常見的控制算法。
PID已經有107年的歷史了,它并不是什么很神圣的東西,大家一定都見過PID的實際應用。
2024-03-18 11:24:53 86
86 
Simulink是一個基于圖形的仿真環境,廣泛應用于動態系統和控制設計的多領域建模和仿真。
2024-02-18 17:18:26503 PID控制(Proportional-Integral-Derivative control)是一種常見的自動控制算法,它被廣泛應用于工業自動化、機器人控制、飛行器導航等領域。PID控制通過對反饋
2024-02-01 14:51:16488 PID效應的成因及抑制方法 PID(比例積分微分)控制器是一種常用的自動控制器,廣泛應用于工業控制系統中。它由比例(P)、積分(I)和微分(D)三部分組成,用于控制系統的輸出校正與調節。 PID效應
2024-01-23 14:58:28311 PID(Proportional-Integral-Derivative)控制是一種常見的控制算法,廣泛應用于工業過程控制、機器人控制、自動駕駛等領域。本文將詳細介紹PID控制的原理以及其中的各個
2024-01-22 15:35:00665 無論模型的復雜程度如何,每個 Simulink 用戶都希望提高仿真性能。本文介紹了許多實用技巧和技術,來幫助您在仿真工作流中獲得最佳的性能。
2024-01-18 10:01:45179 
近期有客戶詢問關于PID效應的問題,希望了解PID效應原理以及P型、N型光伏組件PID機理和區別。
2024-01-12 16:27:331093 
PID,就是“比例(proportional)、積分(integral)、微分(derivative)”,是一種很常見的控制算法。
2024-01-11 18:14:13707 
在實際工程中,應用最為廣泛的調節器控制規律為比例、積分、微分控制,簡稱PID控制,又稱PID調節。
2023-12-31 14:39:00381 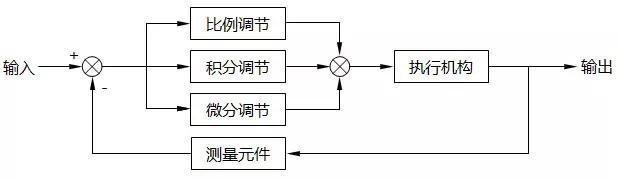
較大的突變時,系統很容易產生超調,影響其穩定性。為了避免階躍信號帶來的不利影響,有學者提出了步進式PID。
步進式PID不對階躍信號進行直接響應,而是按照設定的步進規則逐漸增加設定值,使得信號逐步靠近
2023-12-22 15:38:41
何為PID?為何需要PID?PID能達到什么作用? PID是英文Proportional-Integral-Derivative的縮寫,即比例-積分-微分控制器。它是一種常用的反饋控制手段,常用
2023-12-07 13:37:42553 電子發燒友網站提供《Simulink數字邏輯電路的仿真.pdf》資料免費下載
2023-11-18 09:24:08 4
4 電子發燒友網站提供《MATLAB的數字邏輯電路Simulink仿真.pdf》資料免費下載
2023-11-17 15:39:093 當我們用simulink完成控制程序的搭建后,我們期望下一次可以直接對ROS進行控制,而不是每次都需要啟動matlab和simulink,因此我們可以使用simulink的代碼生成器,生成ROS代碼
2023-11-15 17:53:51298 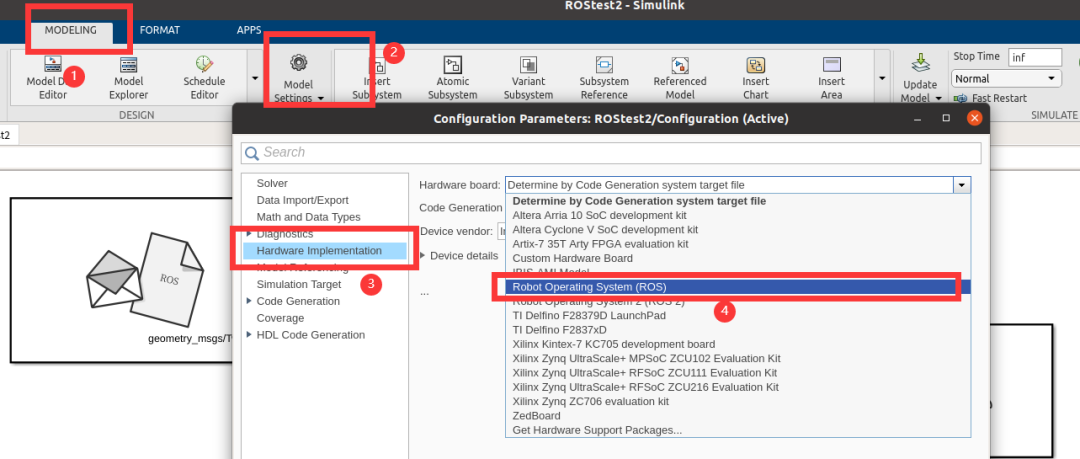
Home>Simulink來打開Simulink的起始頁。 2.在Simulink開始頁,單擊空白模型創建并打開一個新的Simulink模型。 3.在Simulink工具條中,選擇Simulation
2023-11-15 17:32:46233 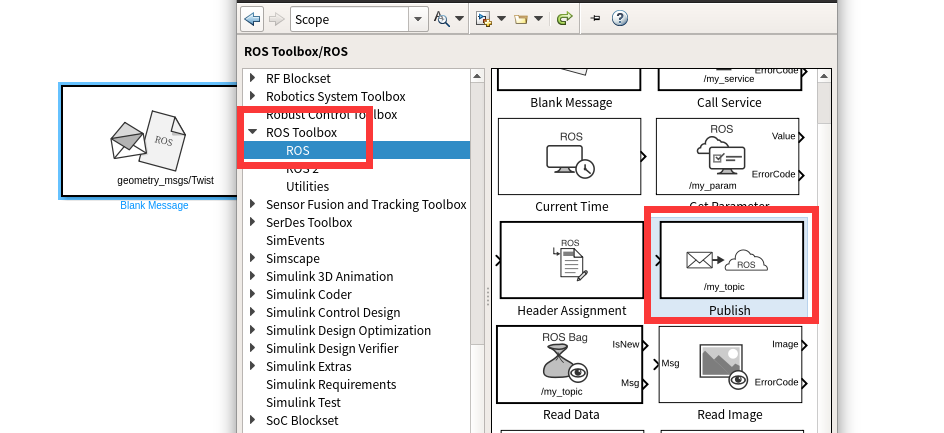
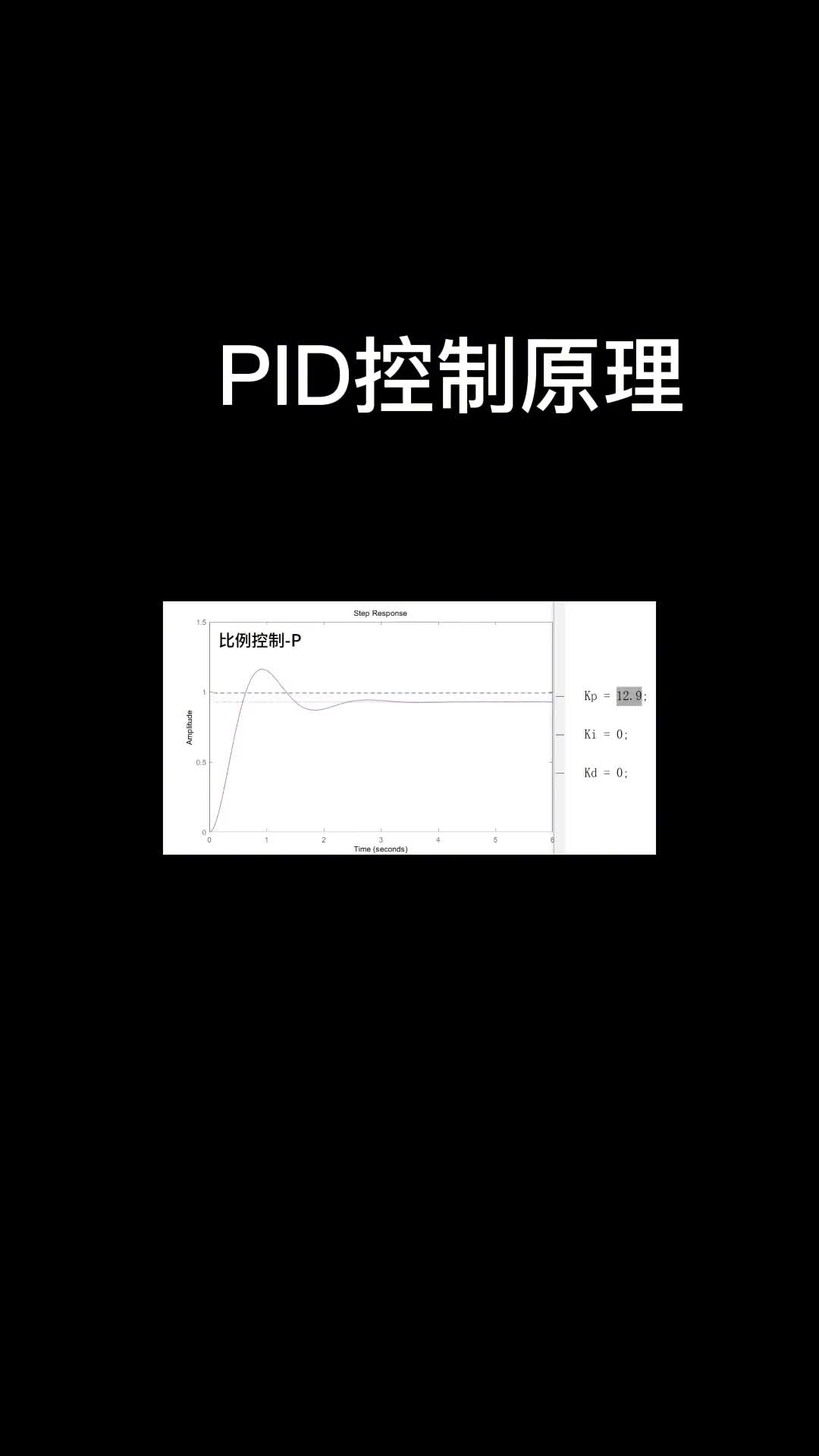
在學習 PID 算法的參數整定的時候,每一個系統的 PID系數是不通用的,在不同的系統中運用同樣的 PID系數,其最終所體現的效果可能是相差可能甚遠的,所以我們需要根據實際的系統進行 PID 的參數
2023-11-14 17:12:52900 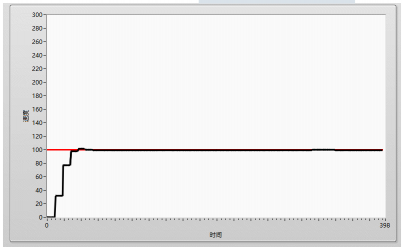
。 該算法由于無需建立精確模型,算法簡單易實現,廣泛應用于各工業領域,但其參數調整比較困難,因此有許多學者將現代智能化算法如模糊控制、神經網絡控制等算法與 PID算法進行結合,簡化了控制器參數調整過程。 通過計算期望車速與實際車
2023-11-10 17:50:261558 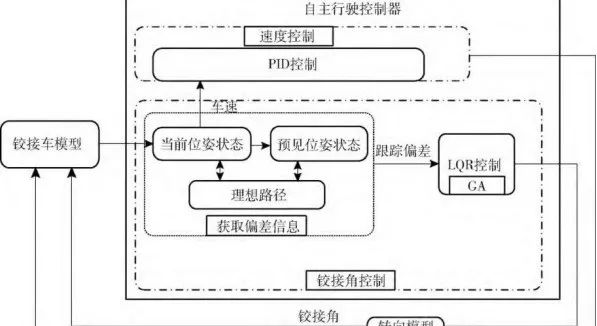
PID控制算法是目前應用較為廣泛的一種控制算法,PID控制具有參數可調、應用范圍廣、控制精度高等優點。在實際工程中,PID算法可以應用于機電控制、工業自動化、機器人控制、微處理器控制等多個領域。
2023-11-10 16:56:341140 增量式pid中的kpkikd對應位置式的中的pi d 的值嗎,調節增量式pid遇到的問題,請問如何調節增量式pid?感謝。
2023-11-09 07:27:41
歡迎來到森木磊石「技術微課堂」,本期為大家分享經典控制算法之一的PID控制方法。PID控制方法從提出至今已有百余年歷史,其由于結構簡單、易于實現、魯棒性好、可靠性高等特點,在機電、冶金、機械、化工
2023-11-08 08:23:25622 
我們將使用實例講解MATLAB / Simulink HDL 使用入門。
2023-11-06 09:12:47537 
MATLAB是一種非常強大的工具,用于實現和分析PID(比例-積分-微分)控制器。在MATLAB中,您可以使用控制系統工具箱來設計、模擬和調整PID控制系統。以下是一般步驟,演示如何在MATLAB
2023-11-04 08:00:51867 
強化學習是機器學習的方式之一,它與監督學習、無監督學習并列,是三種機器學習訓練方法之一。 在圍棋上擊敗世界第一李世石的 AlphaGo、在《星際爭霸2》中以 10:1 擊敗了人類頂級職業玩家
2023-10-30 11:36:401037 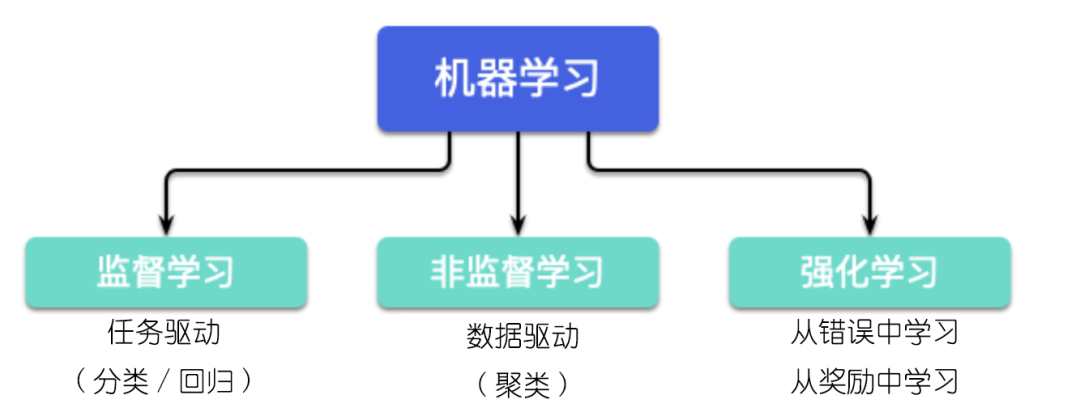
位置式 PID 和增量式 PID有什么區別。在小車調速里一般用增量式,為什么呢?
2023-10-26 06:54:11
功能:利用Simulink自動生成STM32串口代碼,在Keil中編譯后直接下載到主芯片,實現串口通訊的功能。
2023-10-25 17:04:40834 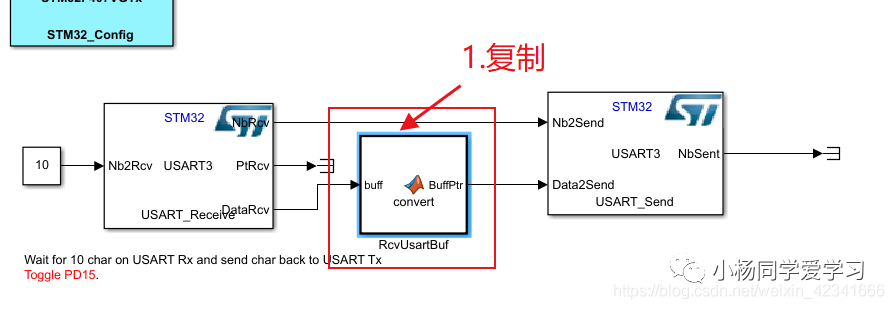
LabVIEW中PID控制的的高級功能 比例-積分-微分(PID)控制占當今控制和自動化應用的90%以上,主要是因為它是一種有效且簡單的解決方案。雖然PID算法最初用于線性、時不變系統,但現在已經
2023-10-24 14:30:17571 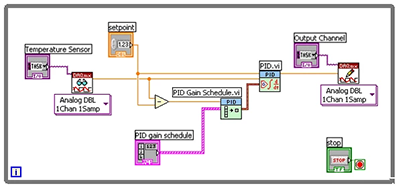
PID控制(Proportional-Integral-Derivative Control)是一種常用的閉環控制算法,用于自動調節和穩定系統的輸出。它通過對系統的誤差進行比例、積分和微分的運算,產生控制輸出,并根據反饋信號進行調整,使系統的輸出盡可能接近期望值。
2023-10-20 17:29:060 電子發燒友網站提供《SIMULINK下基帶傳輸系統的設計.pdf》資料免費下載
2023-10-18 09:58:411 最近在simulink上設計一個車輛橫向控制的PID控制器,其中pid的輸入量是cross track error(車輛離參考路徑的橫向距離),pid的輸出量是車前輪的轉角,那么問題來了,我的輸出量
2023-10-18 06:25:00
PID在控制的過程中怎么控制超調大小
2023-10-10 07:56:49
PID調節系統PID功能由PID調節器或DCS系統內部功能程序模塊實現,了解與PID調節相關的一些基本概念,有助于PID入門新手快速熟悉調節器應用,在自動調節系統中成功整定PID參數。 本文介紹必須
2023-09-25 19:40:01515 
電子發燒友網站提供《Brocade Gen 7簡化了環境管理.pdf》資料免費下載
2023-09-01 14:49:510 PID控制應該算是非常古老而且應用非常廣泛的控制算法了,小到熱水壺溫度控制,大到控制無人機的飛行姿態和飛行速度等等。在電機控制中,PID算法用得尤為常見。
2023-08-31 14:23:18883 
應用程序:文檔顯示了 CPU 調用 PID 軟件功能和 DSP PID 庫之間的性能差異。
BSP 版本: M451 Series BSP CMSIS v3.01.002
硬件
2023-08-30 08:18:24
PID算法通過誤差信號控制被控量,而控制器本身就是比例、積分、微分三個環節的加和。史上最全的PID算法教程,從建模到實際應用!
2023-08-23 16:46:532 PID控制算法是自動控制中的一個非常典型且重要的算法,可以明確的說,對于學自動控制的朋友來說,不懂PID控制,那就等于沒真正的學過自動控制。
2023-08-22 11:01:279107 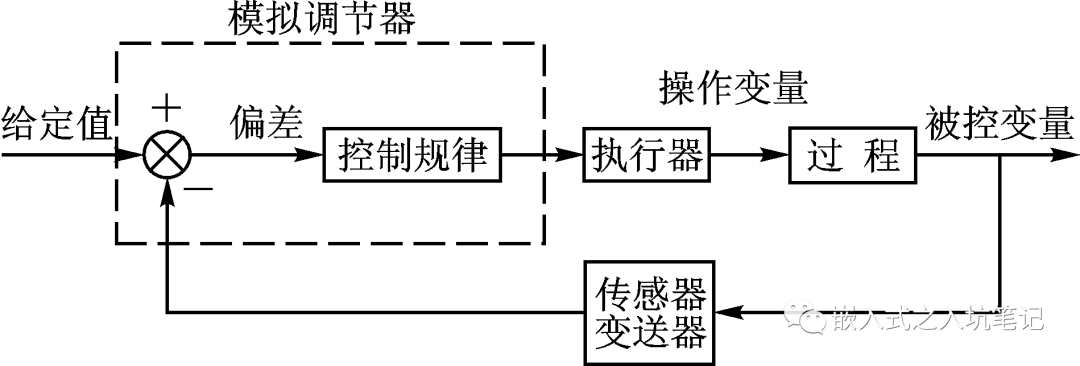
S-Function 使用一種特殊的調用格式讓你可以與Simulink 方程求解器相互作用,這與發生在求解器和內置Simulink 塊之間的相互作用非常相似。S-Function 的形式是非常通用的,且適用于連續、離散和混合系統。
2023-07-29 15:29:28600 
在Matlab 2022a之后引入了Service Interface的建模元素,這讓Simulink模型擁有了向外部其他模型提供函數的能力,也為服務接口建模語義打下基礎。
2023-07-22 09:51:34693 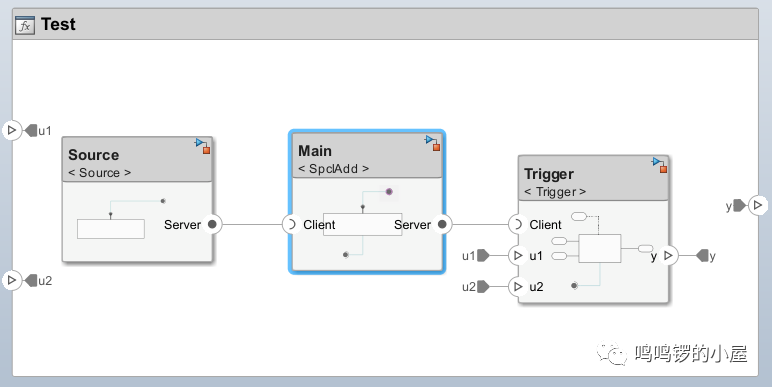
主要使用check custom bounds(自定義范圍)和check step response characteristics(節約響應)兩個模塊。
2023-07-20 14:33:24783 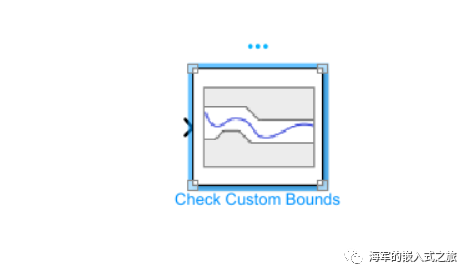
PSO(粒子群算法)在處理連續問題上有著較強的能力,因此很適合用來做參數優化,而PID控制器由三個參數組成,它們分別是:Kp 、Ki 、Kd 。
2023-07-20 14:20:421327 
一. 簡介 相信大家對于PID控制算法,都不感到陌生了,平衡車就是靠它平衡起來的,還有飛控的平衡算法也是它,以及FOC中的閉環控制中也是用的它,它不僅簡單,而且易于理解。那么本篇文章將簡要介紹一下
2023-07-20 09:23:121220 
simulink的命令集 仿真命令 sim 仿真運行一個simulink模塊 sldebug 調試一個simulink模塊 simset 設置仿真參數 simget 獲取仿真參數
2023-07-18 15:12:522 MATLAB/Simulink中一共提供三個代碼生成的工具
2023-07-13 15:11:241273 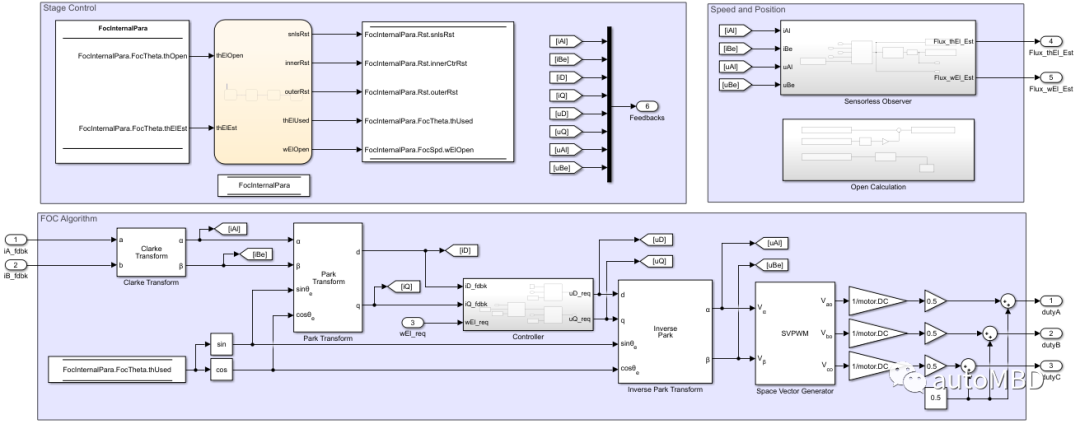
相信很多人都會和simulink打交道,用來仿真算法、生成代碼、構建plant做測試。simulink的好處就是模塊拖過來、一連線就可以用,所見即所得,so easy!為什么還要談規范呢?
2023-07-13 10:08:351393 
最近學習一下Simulink中PID控制器的使用算法,翻閱了一些書籍和論文,出現最多的例子就是汽車行駛速度的PID控制仿真。
2023-07-12 10:54:041648 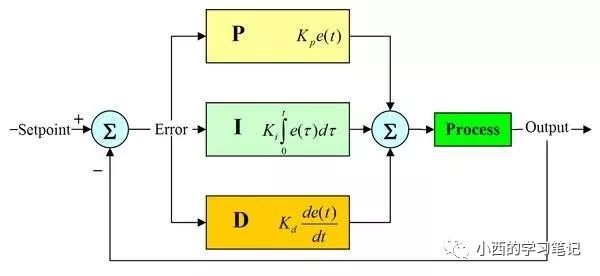
電子發燒友網站提供《Direction Control使用KK飛控和Arduino.zip》資料免費下載
2023-07-06 14:49:542 什么是深度強化學習? 眾所周知,人類擅長解決各種挑戰性的問題,從低級的運動控制(如:步行、跑步、打網球)到高級的認知任務。
2023-07-01 10:29:50998 
simulink模型工作區與 MATLAB 工作區的差異在于每個模型都帶有自己的工作區以存儲變量值。
2023-06-29 15:17:171605 
過程控制中有兩個重要的算法PID反饋算法,卡爾曼狀態估計算法。PID主要用來過程控制,卡爾曼濾波主要用來狀態估計,比如預測運動軌跡之類的。
2023-06-29 10:41:271333 
直流電動機具有啟動轉矩大、控制性能優等特點。目前直流電機多采用傳統的PID控制,PID控制是最早發展起來的控制策略之一。
2023-06-29 10:29:52843 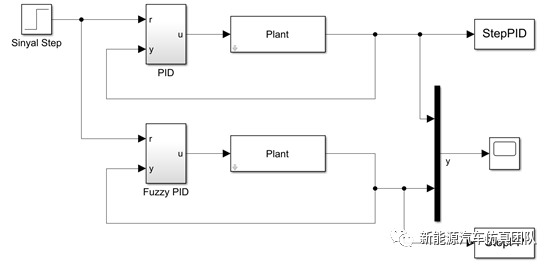
如果進行電池SOC的建模,常常會用到Simulink中的Battery模塊,本期基于Matlab中的help文件,會大家概述Battery模塊的用法。
2023-06-28 15:00:563037 
FOC(Field Oriented Control)磁場定向控制,也稱是Vector Control矢量控制。
2023-06-27 15:55:15656 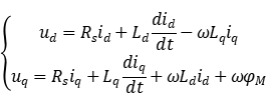
PID調節屬于閉環控制,是過程控制中應用得相當普遍的一種控制方式。PID控制是使控制系統的被控物理量能夠迅速而準確地盡可能接近控制目標的一種手段。 一、如何使變頻器的PID控制功能有效 要實現閉環
2023-06-26 14:17:122657 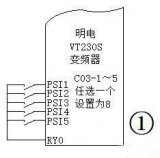
PID,就是“比例(proportional)、積分(integral)、微分(derivative)”,是一種很常見的控制算法。在工程實際中,應用最為廣泛的調節器控制規律為比例、積分、微分控制,簡稱PID控制,又稱PID調節。
2023-06-13 11:46:354815 
當我在simulink中使用MBDT的Freemaster塊時,出現錯誤,這意味著存在一些無效的標識符。如果我不使用 Freemaster 的塊,它可以成功生成代碼并加載到我的 MPC5744 中
2023-06-12 08:49:39
什么是PID?PID,就是“比例(proportional)、積分(integral)、微分(derivative)”,是一種很常見的控制算法。PID已經有107年的歷史了。它并不是什么很神圣的東西
2023-06-09 10:54:24860 
本章節采用龍伯格觀測器進行永磁同步電機的無傳感器控制,首先分析了龍伯格觀測器的原理,然后設計了PMSM的全階龍伯格觀測器,最后通過Matlab/Simulink對該觀測器方案進行仿真分析,為了進行
2023-06-08 14:46:031979 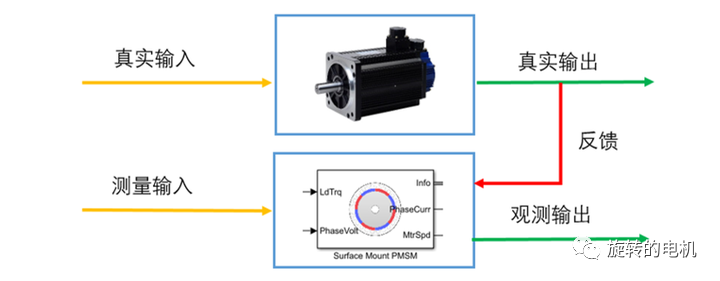
我有一個使用 MBDT 塊的 Simulink 模型,它成功地構建并刷新到 UCANS32K146 開發板。
我嘗試使用“ProjectInfo.xml”文件將代碼導入“S32 Design
2023-05-25 06:03:07
根據網上的資料操作,已可以再simulink中調用pspice中的模型,但是出現仿真錯誤如下:
網上查到的解決方案并沒有解決我的問題,有沒有人可以幫我看看呀,或者您的聯合仿真是通過什么連接的
我
2023-05-23 15:04:50
PID控制算法公式*
2023-05-19 16:45:58541 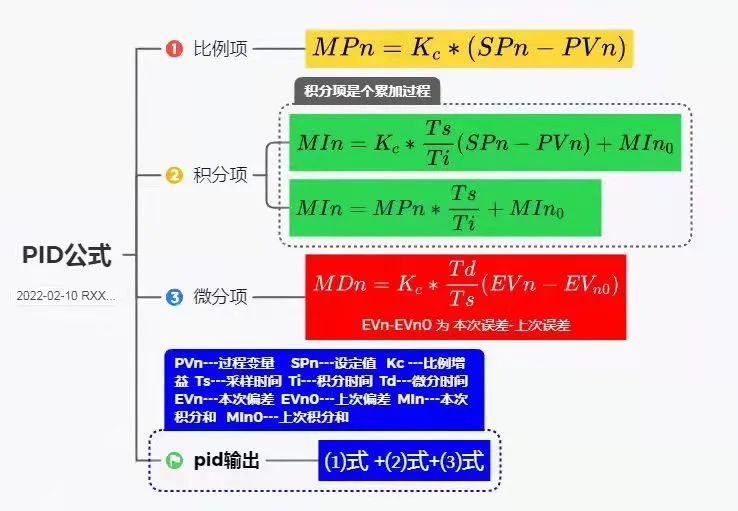
PID及其衍生算法,是目前工業應用最為廣泛的算法之一,是當之無愧的萬能算法!
對于研發人員來講,熟練掌握了PID算法的設計與實現過程,就足夠應對一般的研發問題了。
**PID概念
2023-05-19 16:44:261745 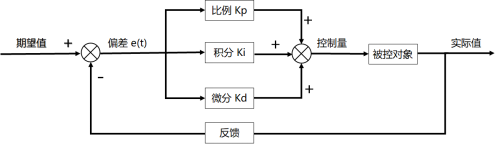
S7-1200 CPU提供了PID控制器回路數量受到CPU的工作內存及支持DB塊數量限制。嚴格上說并沒有限制具體數量,但實際應用推薦客戶不要超過16路PID回路。
2023-05-16 09:55:51582 
KI較小),有利于減小超調,使系統穩定性增加,但靜差消除的時間變長;積分時間常數TI過小時,系統的穩態誤差將難以消除,系統不穩定(下面simulink仿真講述)。
3、改變D單一變量,改變的是系統
2023-05-15 15:08:56
一種非常常用的算法是比例積分微分控制器(proportional-integral-derivative control)或 PID 控制器。PID 算法用于控制各種應用中溫度、壓力、電機位置和流量
2023-05-11 15:36:30710 
本次采用Simulink工具鏈完成,小車的所有代碼均基于Simulink Target Support Package完成。
2023-05-09 17:19:051647 
本人在做電機的參數辨識,使用simulink搭建了電機模型,可是里面有個參數(轉子電阻)我要讓他是時變的,我想通過m函數對模型的參數進行統一賦值,大家有什么好的方法?
2023-05-08 11:44:55
電機PID控制和閉環控制 1 PID控制 1.1 位置式PID 理論公式: PID中,P用于提高響應速度,I用于減小靜差、D用于抑制震蕩。一般在進行PID參數整定時,首先設I和D的值為0,然后
2023-05-06 11:48:082 嗨,我有 S32K144 板和帶 FETS 的電機板。我可以使用 simulink 下載代碼。然而,當我按下按鈕 SW2 和 SW3 時,藍色 LED 也會亮起,電機也會旋轉。我嘗試連接免費主站,但
2023-05-06 06:49:11
FOC算法中的電流環,速度環都涉及到PID控制
PID又分位置式PID控制算法和增量式PID控制算法,而個人認為在電機控制中使用增量式PID效果會更好一些。下面主要介紹幾種增量式PID
控制算法及C代碼實現。
2023-05-05 11:51:0610 在學習 PID 算法的參數整定的時候,每一個系統的 PID系數是不通用的,在不同的系統中運用同樣的 PID 系數
2023-05-04 17:57:4641062 
一道難題需要解答。請幫忙在18號完成,越快越好。希望能給出簡單輔導。謝謝!涉及內容包括matlab simulink知識點涉及 lqr控制 全狀態回授,狀態觀測器聯系電話(微信同號):***
2023-04-16 10:11:06
? ? ? simulink微電網一次調頻風機儲能下垂控制? ?
2023-04-14 14:23:273 ? ? ? ?simulink風光儲調頻兩區域系統 風機同步機光伏儲能調頻
2023-04-14 10:37:003 有哪位兄弟有關于UPFC的simulink仿真可以分享一下嗎?很急!
2023-04-08 15:27:02
我正在玩 S32K146 評估板和 freeMaster 工具。我想知道在 Simulink 中使用基于模型的設計并通過 Simulink 數據字典將變量保存為可校準或信號時,哪些是最佳實踐
2023-04-03 08:02:51
根據以上這些我們就可以
簡單分析simulink中給的永磁同步電機模型了
先看一下總的結構
2023-03-28 10:47:0710 目錄一、設計題目 1.1、設計題目? 三相同步發電機的空載短路的simulink仿真 1.2、設計內容仿真參數 1.3、設計要求 二、原理分析 2.1、空載特性 2.1 、短路特性
2023-03-28 10:40:278 在學習simulink過程中,發現park變換出來的id\iq仍然是交流電,心想這么簡單的變化都不對,懵逼,然后在大佬的講解下,知
道了simulink仿真的Ib相位為-2/3pi。
這是我的仿真模型,主要實現Clark變化、Park變化與反Park變換:
2023-03-27 11:08:220 PID調節器是一種基于比例-積分-微分(PID)控制算法的自動控制系統,它通過不斷地調整控制量,使被控對象的輸出值逐漸趨近目標值,從而實現自動控制。PID調節器廣泛應用于各種工業自動化控制系統
2023-03-25 11:39:332936 正文 這里我們來講解第六個問題,如何系統性的進行PID調參! 這里我們先聊聊什么是PID~ 當今的閉環自動控制技術都是基于反饋的概念以減少不確定性。反饋理論的要素包括三個部分:測量、比較
2023-03-24 16:31:10
PID控制器是應用最廣泛的閉環控制器,它根據給定值與被控實測值之間的偏差; 按照PID算法計算出控制器的輸出量,控制執行機構進行調節,使被控量跟隨給定量變化,并使系統達到穩定; 自動消除各種干擾對控制過程的影響。 其中PID分別表示比例、積分和微分。
2023-03-24 14:07:211357 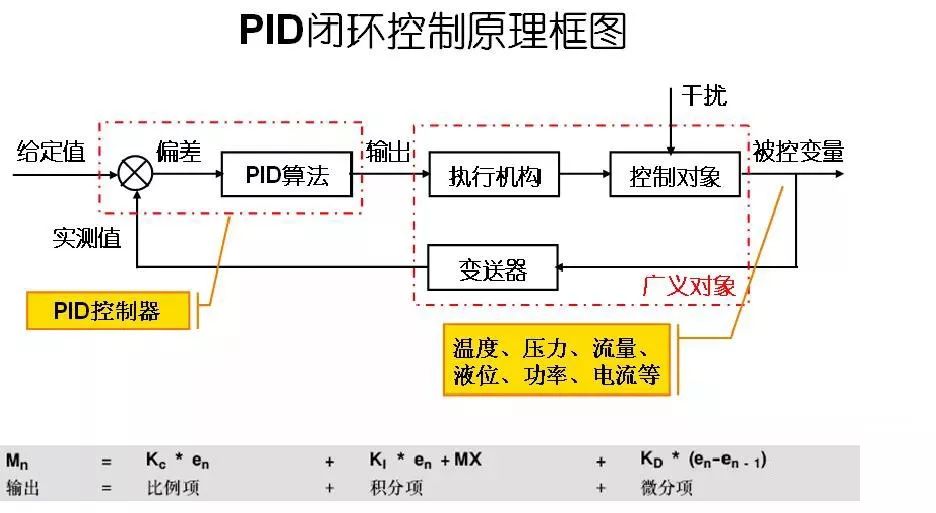
 電子發燒友App
電子發燒友App














 工商網監
工商網監
評論