本篇文章我們主要介紹正運(yùn)動(dòng)技術(shù)動(dòng)態(tài)鏈接庫(kù)環(huán)境配置以及EtherCAT運(yùn)動(dòng)控制器在ROS下的單軸運(yùn)動(dòng)。
2024-03-17 11:11:13 377
377 
本文以正運(yùn)動(dòng)技術(shù)EtherCAT運(yùn)動(dòng)控制器ZMC432和ZMC408CE為例,介紹正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制器在ROS上的應(yīng)用開發(fā)。
2024-03-17 11:06:06452 
本文以正運(yùn)動(dòng)技術(shù)EtherCAT運(yùn)動(dòng)控制器ZMC432和ZMC408CE為例,介紹正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制器在ROS上的應(yīng)用開發(fā)。
2024-03-06 11:47:51627 
3月3日,聯(lián)合電子官微發(fā)布,推出面向跨域融合的新一代整車運(yùn)動(dòng)域控制器VCU8.6平臺(tái)。
2024-03-04 09:52:04413 
的EtherCAT總線運(yùn)動(dòng)控制卡,可選6-64軸運(yùn)動(dòng)控制,支持8路高速數(shù)字輸入,8路高速數(shù)字輸出,可實(shí)現(xiàn)多軸同步控制和高速數(shù)據(jù)傳輸,集成豐富的運(yùn)動(dòng)控制功能,包含多軸點(diǎn)位運(yùn)動(dòng)、位置鎖存、直線插補(bǔ),圓弧插補(bǔ),連續(xù)
2024-01-24 09:48:21
安川運(yùn)動(dòng)控制器具有高精度、快速響應(yīng)和穩(wěn)定可靠的優(yōu)勢(shì),支持多種控制模式和傳感器配合,提供實(shí)時(shí)監(jiān)控和精確調(diào)整功能。北成新控以核心控制器為平臺(tái),為不同客戶提供專用控制系統(tǒng),助力企業(yè)數(shù)智化轉(zhuǎn)型。
2024-01-11 11:00:05108 
SuperCAT是凌華科技打造的基于軟件控制的EtherCAT運(yùn)動(dòng)控制器,其核心的控制軟件來自于凌華二十多年運(yùn)動(dòng)控制經(jīng)驗(yàn)的積累,整合了凌華脈沖卡和EtherCAT總線卡的所有功能,系統(tǒng)通訊周期相比硬件的EtherCAT總線卡得到了大幅提升,同時(shí)可以滿足更多軸數(shù)的應(yīng)用需求。
2024-01-09 11:57:44259 
,通常需要對(duì)老舊工廠進(jìn)行更新改造,將定速電機(jī)及控制器更換為性能優(yōu)越的運(yùn)動(dòng)控制設(shè)備。這些設(shè)備依靠先進(jìn)的檢測(cè)技術(shù)實(shí)現(xiàn)精確的運(yùn)動(dòng)和功率控制。為了獲得最佳的工作流程和生產(chǎn)靈活性,設(shè)計(jì)人員還必須在生產(chǎn)設(shè)備和制造執(zhí)行系統(tǒng)之間建立實(shí)時(shí)連接。 目前
2024-01-01 11:16:00306 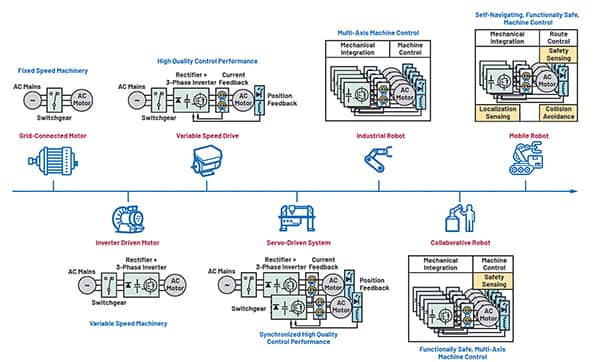
運(yùn)動(dòng)控制器就是控制電動(dòng)機(jī)的運(yùn)行方式的專用控制器:比如電動(dòng)機(jī)在由行程開關(guān)控制交流接觸器而實(shí)現(xiàn)電動(dòng)機(jī)拖動(dòng)物體向上運(yùn)行達(dá)到指定位置后又向下運(yùn)行,或者用時(shí)間繼電器控制電動(dòng)機(jī)正反轉(zhuǎn)或轉(zhuǎn)一會(huì)停一會(huì)再轉(zhuǎn)一會(huì)再停。
2023-12-20 10:06:061383 。利用EtherCAT技術(shù)的優(yōu)異性能,可以實(shí)現(xiàn)用傳統(tǒng)現(xiàn)場(chǎng)總線系統(tǒng)所無(wú)法實(shí)現(xiàn)的控制方法。
正運(yùn)動(dòng)技術(shù)的ZMC464運(yùn)動(dòng)控制器,實(shí)際測(cè)試過100us可以帶16軸EtherCAT伺服運(yùn)行,500us可以帶
2023-12-13 11:37:40
軌跡的控制,滿足各種高精度制造和加工需求。同時(shí),安川電機(jī)的運(yùn)動(dòng)控制器采用先進(jìn)的計(jì)算機(jī)技術(shù),具有強(qiáng)大的運(yùn)算和控制能力,能夠實(shí)現(xiàn)實(shí)時(shí)監(jiān)控和精確調(diào)整,確保運(yùn)動(dòng)過程中的高精
2023-12-08 09:02:18494 
工業(yè)驅(qū)動(dòng)器的諸多方面都對(duì)實(shí)現(xiàn)精密的運(yùn)動(dòng)控制很重要,精密運(yùn)動(dòng)控制涉及實(shí)時(shí)控制設(shè)計(jì)中的三個(gè)基礎(chǔ)子系統(tǒng),即感應(yīng)、處理和驅(qū)動(dòng)。本文將論述各個(gè)子系統(tǒng)的支持技術(shù)示例。
2023-11-18 16:00:13258 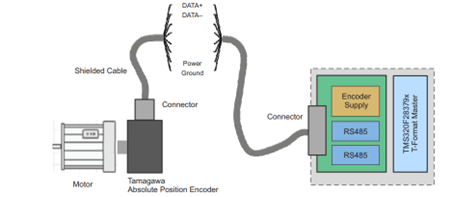
上料小車傳動(dòng)電機(jī)(自帶編碼器)帶吸盤實(shí)現(xiàn)上料控制,小車軌道設(shè)置四個(gè)位置實(shí)現(xiàn)不同的控制要求。今天更換電機(jī)送電后小車無(wú)法實(shí)現(xiàn)精確定位,請(qǐng)問更換帶編碼器的電機(jī)后需要做哪些工作才能實(shí)現(xiàn)原來設(shè)定位置的精確控制。
哪位大師有編碼器實(shí)現(xiàn)位置控制的資料,能不能提供一些作為學(xué)習(xí)參考!!!謝謝!!!
2023-11-10 07:41:01
在工業(yè)自動(dòng)化領(lǐng)域,多任務(wù)編程在運(yùn)動(dòng)控制器上得到廣泛應(yīng)用。多任務(wù)編程允許將復(fù)雜的程序分解為獨(dú)立的任務(wù),實(shí)現(xiàn)并發(fā)性和高效處理。每個(gè)任務(wù)在運(yùn)動(dòng)控制周期中運(yùn)行,包括Motion Control、多種通訊
2023-11-07 09:52:36
今天,正運(yùn)動(dòng)小助手給大家分享一下全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器ZMC432H如何使用Python+QT實(shí)現(xiàn)連續(xù)軌跡加工。 01 功能簡(jiǎn)介 全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器
2023-11-06 16:03:52278 
今天,正運(yùn)動(dòng)小助手給大家分享一下全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器ZMC432H如何使用Python+QT實(shí)現(xiàn)連續(xù)軌跡加工。
2023-11-02 16:45:01270 
本節(jié)課程我們主要講解一下正運(yùn)動(dòng)API函數(shù)封裝原理以及自定義API封裝例程。
正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制器均使用統(tǒng)一的API接口
所有的控制器和控制卡均使用同一套API函數(shù),均支持C、C++、C#
2023-10-26 15:11:35
運(yùn)動(dòng)控制系統(tǒng)其實(shí)運(yùn)動(dòng)控制系統(tǒng)是一個(gè)比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會(huì)由眾多的組成部分構(gòu)成。運(yùn)動(dòng)控制系統(tǒng)會(huì)綜合信號(hào)分析與處理、自動(dòng)控制、通信等的內(nèi)容。運(yùn)動(dòng)的要素抽象來講,運(yùn)動(dòng)的要素可概況
2023-10-25 08:07:52813 
PLC的運(yùn)動(dòng)控制是指PLC系統(tǒng)通過控制運(yùn)動(dòng)設(shè)備的運(yùn)動(dòng)軸,實(shí)現(xiàn)精確、穩(wěn)定和可編程的運(yùn)動(dòng)控制功能。它可以控制運(yùn)動(dòng)設(shè)備(如電機(jī)、伺服驅(qū)動(dòng)器等)的位置、速度和加速度等參數(shù),以實(shí)現(xiàn)所需的運(yùn)動(dòng)軌跡和運(yùn)動(dòng)邏輯
2023-10-23 08:08:08602 全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器ZMC432H是正運(yùn)動(dòng)的一款軟硬件全國(guó)產(chǎn)自主可控,運(yùn)動(dòng)控制接口兼容EtherCAT總線和脈沖型的獨(dú)立式運(yùn)動(dòng)控制器,最多支持32軸運(yùn)動(dòng)控制,同時(shí)支持正運(yùn)動(dòng)遠(yuǎn)程HMI功能,能提供網(wǎng)絡(luò)組態(tài)顯示,可實(shí)時(shí)監(jiān)控和調(diào)整參數(shù)配置。
2023-10-22 10:51:57459 
CRT-DMC600MF系列運(yùn)動(dòng)控制系統(tǒng)主要為3至6軸,示教系統(tǒng)主要由運(yùn)動(dòng)控制器和手持盒(Leader30ST)兩個(gè)部分組成。Leader30ST手持盒,為手持控制端,通過標(biāo)準(zhǔn)Modbus協(xié)議
2023-10-21 08:07:43474 PLC的運(yùn)動(dòng)控制是指PLC系統(tǒng)通過控制運(yùn)動(dòng)設(shè)備的運(yùn)動(dòng)軸,實(shí)現(xiàn)精確、穩(wěn)定和可編程的運(yùn)動(dòng)控制功能。它可以控制運(yùn)動(dòng)設(shè)備(如電機(jī)、伺服驅(qū)動(dòng)器等)的位置、速度和加速度等參數(shù),以實(shí)現(xiàn)所需的運(yùn)動(dòng)軌跡和運(yùn)動(dòng)邏輯。
2023-10-20 10:20:13679 全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器ZMC432H是正運(yùn)動(dòng)的一款軟硬件全國(guó)產(chǎn)自主可控,運(yùn)動(dòng)控制接口兼容EtherCAT總線和脈沖型的獨(dú)立式運(yùn)動(dòng)控制器,最多支持32軸運(yùn)動(dòng)控制,同時(shí)支持正運(yùn)動(dòng)遠(yuǎn)程HMI功能,能提供網(wǎng)絡(luò)組態(tài)顯示,可實(shí)時(shí)監(jiān)控和調(diào)整參數(shù)配置。
2023-10-16 09:49:53421 
直流電機(jī)運(yùn)動(dòng)控制的過程中怎么實(shí)現(xiàn)高精度的位置控制
2023-10-11 06:23:00
點(diǎn)位運(yùn)動(dòng)控制:即僅對(duì)終點(diǎn)位置有要求,與運(yùn)動(dòng)的中間過程即運(yùn)動(dòng)軌跡無(wú)關(guān)。相應(yīng)的運(yùn)動(dòng)控制器要求具有快速的定位速度,在運(yùn)動(dòng)的加速段和減速段,采用不同的加減速控制策略。
2023-10-09 17:10:10555 全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器的軸參數(shù)設(shè)置與單軸運(yùn)動(dòng)例程講解。
2023-09-27 15:42:26353 
PCL6143運(yùn)動(dòng)控制器的原理及應(yīng)用 可以用于設(shè)計(jì)開發(fā)相應(yīng)的芯片電路。介紹了PCL6143 的功能結(jié)構(gòu)、主要寄存器以及指令系統(tǒng)。設(shè)計(jì)了一款基于PC104總線的四軸運(yùn)動(dòng)控制卡, 介紹了如何編寫運(yùn)動(dòng)控制卡的功能函數(shù)庫(kù)。
2023-09-26 08:14:08
運(yùn)動(dòng)控制器就是控制電動(dòng)機(jī)的運(yùn)行方式的專用控制器:比如電動(dòng)機(jī)在由行程開關(guān)控制交流接觸器而實(shí)現(xiàn)電動(dòng)機(jī)拖動(dòng)物體向上運(yùn)行達(dá)到指定位置后又向下運(yùn)行,或者用時(shí)間繼電器控制電動(dòng)機(jī)正反轉(zhuǎn)或轉(zhuǎn)一會(huì)停一會(huì)再轉(zhuǎn)一會(huì)再停。
2023-09-21 16:26:411760 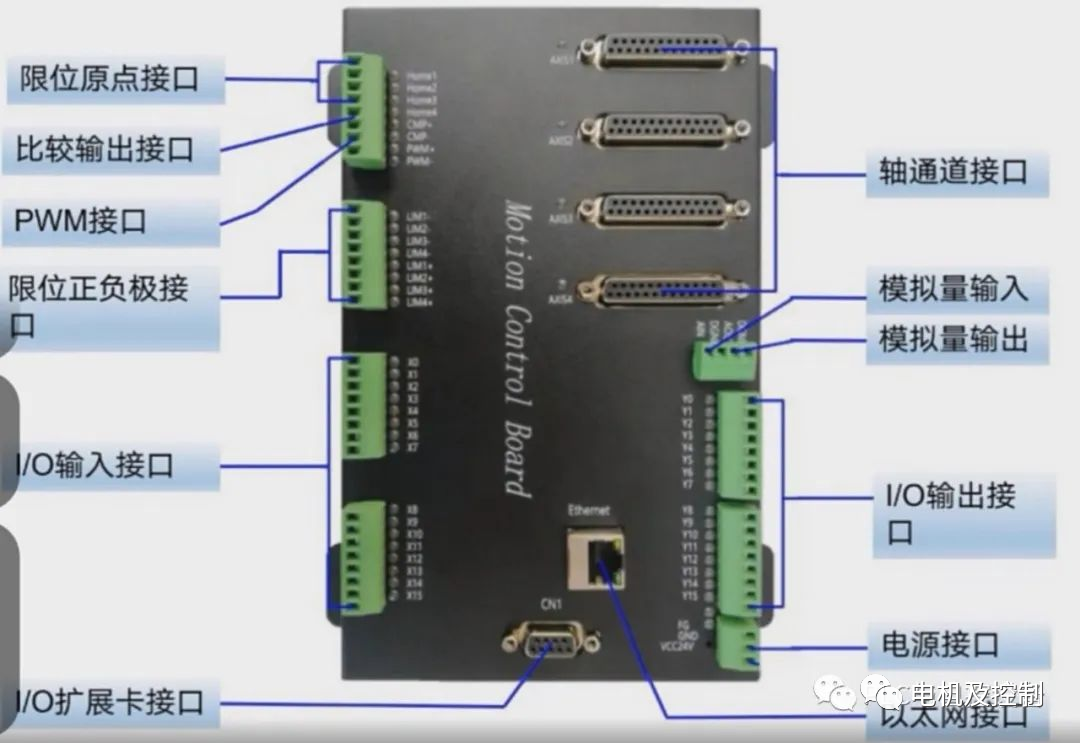
運(yùn)動(dòng)控制器是一種電子設(shè)備,通常與運(yùn)動(dòng)控制軟件配合使用,用于控制機(jī)器人、數(shù)控機(jī)床和其他自動(dòng)化設(shè)備移動(dòng)或執(zhí)行各種任務(wù)。運(yùn)動(dòng)控制器主要由一臺(tái)計(jì)算機(jī)和相關(guān)的硬件組成,如數(shù)字信號(hào)處理器(DSP)和模擬/數(shù)字
2023-09-21 08:08:39470 直線電機(jī)模組的精度主要涉及到分辨率、定位精度和重復(fù)定位精度三個(gè)參數(shù)。它們之間相互關(guān)聯(lián),而且都是直線電機(jī)模組精度的重要指標(biāo)。只有全面理解直線電機(jī)模組精度的三個(gè)參數(shù),才能更好地實(shí)現(xiàn)直線電機(jī)模組的高精度
2023-09-19 10:13:36476 PLC、PC-based、專用控制器,該選擇哪種運(yùn)動(dòng)控制器?有數(shù)據(jù)顯示,目前PLC、PC-based和專用控制器在運(yùn)動(dòng)控制市場(chǎng)中的占比分別為41%、28%和31%。 PLC在許多傳統(tǒng)的工業(yè)自動(dòng)化
2023-09-19 09:58:30443 
自主設(shè)計(jì) 了一種雙核四軸運(yùn)動(dòng)控制器 。該 運(yùn)動(dòng)控制器 以 MCX314As與 STM32為核心 硬件 。該控制 器不僅能夠完成 四軸 的位置 、速度和 s曲線 的加減 速控 制等功能 ,還 能夠
2023-09-19 08:08:55
運(yùn)動(dòng)控制
? 精確的位置控制 – 多軸協(xié)調(diào) – 選擇放置, 成形切削 – 自動(dòng)化測(cè)試, DUT處理 ? 精確的速度控制 – 傳送帶,變速電動(dòng)機(jī)
? 高速I/O同步
2023-09-19 06:25:20
總線,控制器本身支持 6 軸運(yùn)動(dòng)控制,最多可支持 12 軸運(yùn)動(dòng)控制,用以實(shí)現(xiàn)點(diǎn)位運(yùn)動(dòng)、直線運(yùn)動(dòng)、電子凸輪等控制需求。XPLC006E 經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制器可用于電子半導(dǎo)體設(shè)備(檢測(cè)類設(shè)備、組裝類設(shè)備、鎖附類設(shè)備、焊錫機(jī))、點(diǎn)膠設(shè)備、非標(biāo)設(shè)備、印刷包裝設(shè)備、紡織服裝設(shè)備、醫(yī)療設(shè)備、流水
2023-09-18 17:47:55 0
0 運(yùn)動(dòng)控制(MotionControl)通常是指在復(fù)雜條件下將預(yù)定的控制方案、規(guī)劃指令轉(zhuǎn)變成期望的機(jī)械運(yùn)動(dòng),實(shí)現(xiàn)機(jī)械運(yùn)動(dòng)精確的位置控制、速度控制、加速度控制、轉(zhuǎn)矩或力的控制。運(yùn)動(dòng)控制器就是控制電動(dòng)機(jī)
2023-09-10 08:08:34548 管理和運(yùn)動(dòng)追蹤功能。而在工業(yè)領(lǐng)域中,運(yùn)動(dòng)傳感器被用于機(jī)器人、自動(dòng)化生產(chǎn)線、無(wú)人機(jī)等設(shè)備中,以實(shí)現(xiàn)精確的定位、導(dǎo)航和運(yùn)動(dòng)控制等功能。鑒于運(yùn)動(dòng)傳感器的重要作用,瑞薩電子(Renasas)推出模擬運(yùn)動(dòng)傳感器解決
2023-09-08 16:30:39524 
管理和運(yùn)動(dòng)追蹤功能。而在工業(yè)領(lǐng)域中,運(yùn)動(dòng)傳感器被用于機(jī)器人、自動(dòng)化生產(chǎn)線、無(wú)人機(jī)等設(shè)備中,以實(shí)現(xiàn)精確的定位、導(dǎo)航和運(yùn)動(dòng)控制等功能。 鑒于運(yùn)動(dòng)傳感器的重要作用,瑞薩電子推出模擬運(yùn)動(dòng)傳感器解決方案,可以使用被動(dòng)紅
2023-09-07 18:15:15264 
集運(yùn)動(dòng)控制器、機(jī)器人控制系統(tǒng)和六軸伺服驅(qū)動(dòng)于一體
? 體積小、功率密度高、集成度高,適合20KG以下機(jī)器人 ? 采用多自由度和非線性控制算法,實(shí)現(xiàn)高動(dòng)態(tài)響應(yīng)、高精度的電流、速度及位置控制? 支持
2023-09-07 07:57:07
本文檔旨在提供 ST 的 LIS2DS12 運(yùn)動(dòng)傳感器相關(guān)的使用信息和應(yīng)用提示。LIS2DS12 是系統(tǒng)級(jí)封裝的 3D 數(shù)字加速度計(jì),具有數(shù)字 I2C/SPI 串口標(biāo)準(zhǔn)輸出,在高分辨率模式下功耗
2023-09-06 06:10:18
正運(yùn)動(dòng)攜手EPLAN,以高效的電氣設(shè)計(jì)助力運(yùn)動(dòng)控制的數(shù)字化設(shè)計(jì)
2023-08-31 11:10:03357 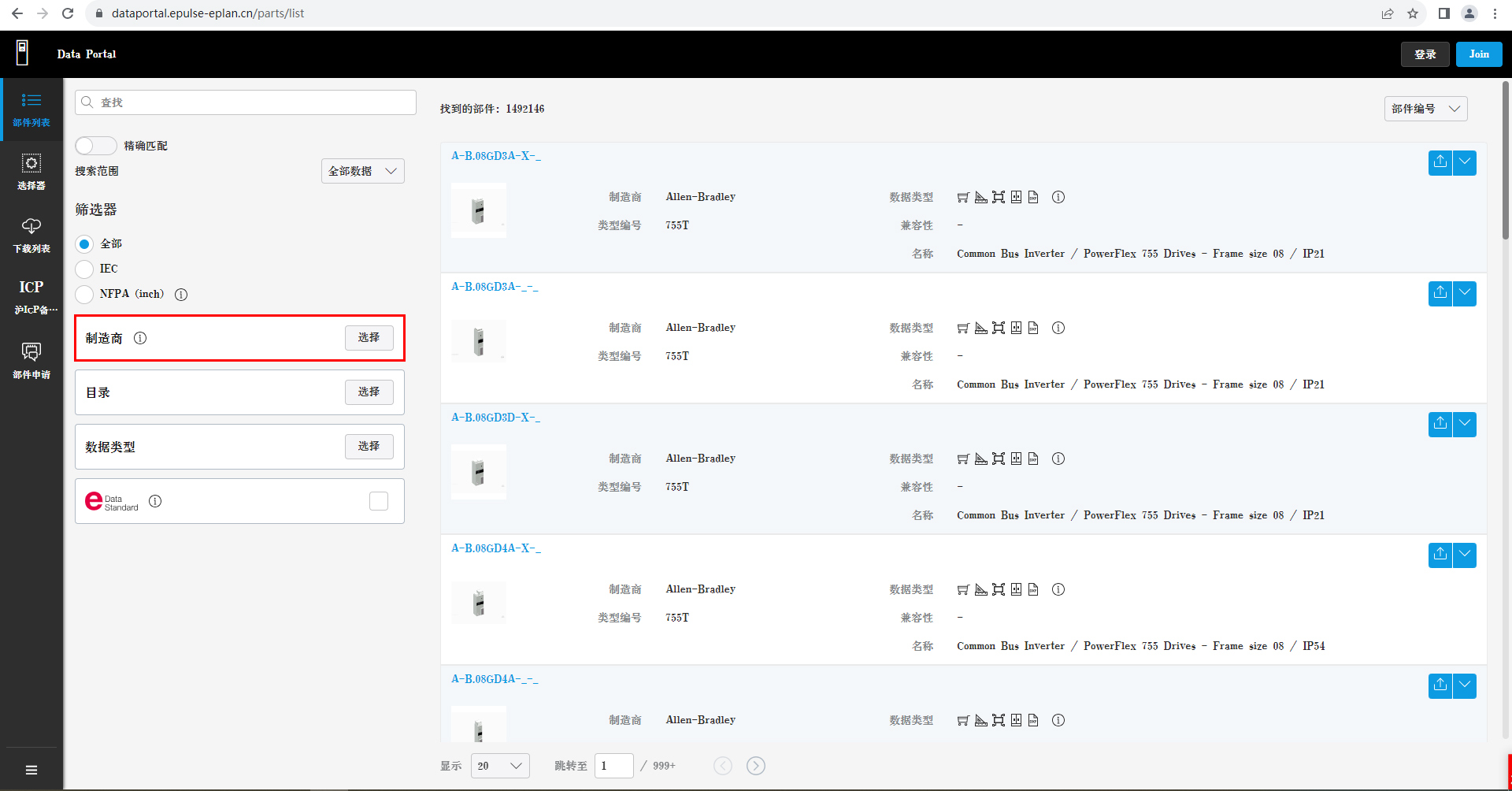
,控制器本身支持 6 軸運(yùn)動(dòng)控制,最多可支持 12 軸運(yùn)動(dòng)控制,用以實(shí)現(xiàn)點(diǎn)位運(yùn)動(dòng)、直線運(yùn)動(dòng)、電子凸輪等控制需求。XPLC006E 經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制器可用于電子半導(dǎo)體設(shè)備(檢測(cè)類設(shè)備、組裝類設(shè)備、鎖附類設(shè)備、焊錫機(jī))、點(diǎn)膠設(shè)備、非標(biāo)設(shè)備、印刷包裝設(shè)備、紡織服裝設(shè)備、醫(yī)療設(shè)備、流水線等應(yīng)用場(chǎng)
2023-08-22 09:23:490 現(xiàn)在PLC的運(yùn)動(dòng)控制功能越來越強(qiáng)了,圓弧插補(bǔ)、螺旋插補(bǔ)、電子凸輪都能輕松勝任了,那運(yùn)動(dòng)控制器和具備運(yùn)動(dòng)控制功能的PLC的差別在哪里,運(yùn)動(dòng)控制器以后的優(yōu)勢(shì)又在哪里?PLC及運(yùn)動(dòng)控制器發(fā)展到今天,它們
2023-08-08 08:09:46820 “現(xiàn)在 PLC 的運(yùn)動(dòng)控制功能越來越強(qiáng)了,圓弧插補(bǔ)、螺旋插補(bǔ)、電子凸輪都能輕松勝任了,那運(yùn)動(dòng)控制器和具備運(yùn)動(dòng)控制功能的 PLC 的差別在哪里,運(yùn)動(dòng)控制器以后的優(yōu)勢(shì)又在哪里?”
2023-08-06 09:30:011203 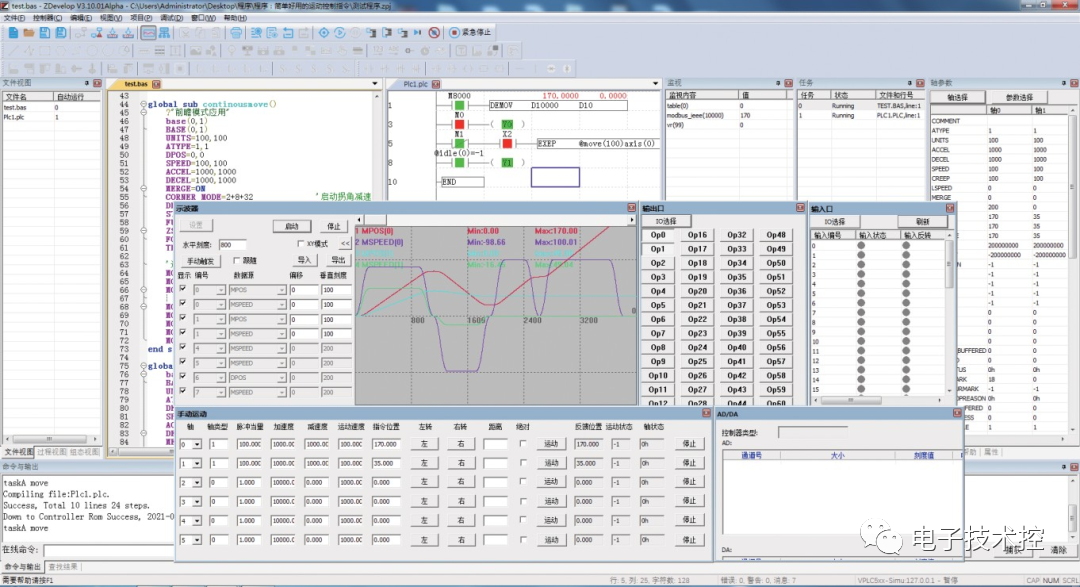
的發(fā)展,工業(yè)機(jī)器人應(yīng)用越來越廣泛,PLC也不再是簡(jiǎn)單的可編程邏輯控制器,各個(gè)品牌廠家都推出了自己的運(yùn)動(dòng)控制型PLC,來實(shí)現(xiàn)一些運(yùn)動(dòng)控制功能,與此同時(shí),運(yùn)動(dòng)控制卡及運(yùn)
2023-08-04 08:09:121072 正運(yùn)動(dòng)技術(shù)EtherCAT運(yùn)動(dòng)控制邊緣控制器ZMC432H接口介紹。
2023-08-03 09:18:44492 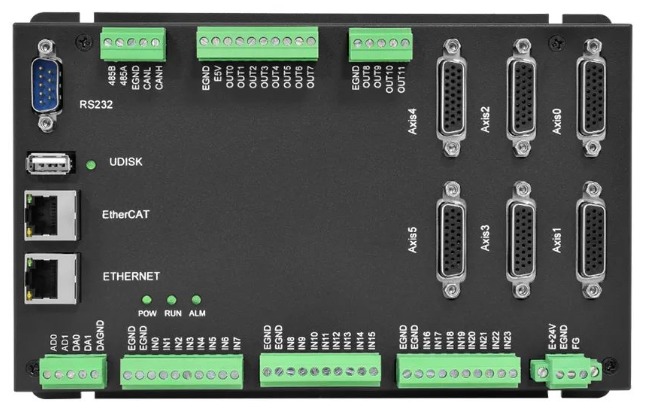
運(yùn)動(dòng)控制器是一種電子設(shè)備,通常與運(yùn)動(dòng)控制軟件配合使用,用于控制機(jī)器人、數(shù)控機(jī)床和其他自動(dòng)化設(shè)備移動(dòng)或執(zhí)行各種任務(wù)。運(yùn)動(dòng)控制器主要由一臺(tái)計(jì)算機(jī)和相關(guān)的硬件組成,如數(shù)字信號(hào)處理器(DSP)和模擬/數(shù)字
2023-07-31 17:42:41554 全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器ZMC432H是正運(yùn)動(dòng)的一款軟硬件全國(guó)產(chǎn)自主可控,運(yùn)動(dòng)控制接口兼容EtherCAT總線和脈沖型的獨(dú)立式運(yùn)動(dòng)控制器,最多支持32軸運(yùn)動(dòng)控制,同時(shí)支持正運(yùn)動(dòng)遠(yuǎn)程顯示功能,能提供網(wǎng)絡(luò)組態(tài)顯示,可實(shí)時(shí)監(jiān)控和調(diào)整參數(shù)配置。
2023-07-29 09:15:24446 
運(yùn)動(dòng)控制器的工作原理是將預(yù)定的控制方案、規(guī)劃指令轉(zhuǎn)變成期望的機(jī)械運(yùn)動(dòng),實(shí)現(xiàn)機(jī)械運(yùn)動(dòng)精確的位置(點(diǎn)位、運(yùn)動(dòng)軌跡、插補(bǔ)等)控制、速度控制、加速度控制、轉(zhuǎn)矩或力的控制。
2023-06-25 10:44:542150 
運(yùn)動(dòng)控制卡是基于PC機(jī)及工業(yè)PC機(jī)、 用于各種運(yùn)動(dòng)控制場(chǎng)合(包括位移、速度、加速度等)的上位控制單元。 運(yùn)動(dòng)控制卡基于PC總線,是利用高性能微處理器(如DSP)及大規(guī)模可編程器件實(shí)現(xiàn)多個(gè)伺服電機(jī)
2023-06-14 15:39:06458 運(yùn)動(dòng)控制器是一種特殊的控制器,用于控制電機(jī)的運(yùn)行模式:例如,電機(jī)通過沖擊開關(guān)控制交流接觸器,將電機(jī)拉到指定位置,然后下降或使用時(shí)間繼電器控制電機(jī)的前后旋轉(zhuǎn),或先停一會(huì)兒,再停一會(huì)兒。運(yùn)動(dòng)控制在機(jī)器人和數(shù)控機(jī)床領(lǐng)域的應(yīng)用比在專用機(jī)床中更復(fù)雜,因?yàn)楹笳叩?b class="flag-6" style="color: red">運(yùn)動(dòng)形式更簡(jiǎn)單,通常被稱為通用運(yùn)動(dòng)控制。
2023-06-12 17:17:231383 ZMC 是正運(yùn)動(dòng)技術(shù)推出的網(wǎng)絡(luò)運(yùn)動(dòng)控制器型號(hào)簡(jiǎn)稱。ZMC304 高性能多軸運(yùn)動(dòng)控制器是一款脈沖型的獨(dú)立式運(yùn)動(dòng)控制器,控制器本身最多支持 4 軸,可擴(kuò)展到 10 軸的復(fù)雜的連續(xù)軌跡控制需求。ZMC3
2023-06-07 17:24:580 ZMC 是正運(yùn)動(dòng)技術(shù)推出的網(wǎng)絡(luò)運(yùn)動(dòng)控制器型號(hào)簡(jiǎn)稱。ZMC4 系列支持正運(yùn)動(dòng) XPLC 的功能,可以通過網(wǎng)絡(luò)來做組態(tài)顯示。ZMC406 高性能多軸運(yùn)動(dòng)控制器是一款兼容 EtherCAT 總線和脈沖
2023-06-02 17:16:261 ZMC212BE 經(jīng)濟(jì)型多軸獨(dú)立式運(yùn)動(dòng)控制器,支持脈沖軸和總線軸。控制器本地支持 12 軸,最多擴(kuò)展至16 軸的復(fù)雜的連續(xù)軌跡控制需求。ZMC212BE 經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制器可用于電子半導(dǎo)體設(shè)備
2023-06-01 17:02:160 ZMC 是正運(yùn)動(dòng)技術(shù)推出的網(wǎng)絡(luò)運(yùn)動(dòng)控制器型號(hào)簡(jiǎn)稱。ZMC4 系列支持正運(yùn)動(dòng) XPLC 的功能,可以通過網(wǎng)絡(luò)來做組態(tài)顯示。ZMC460N 高性能多軸運(yùn)動(dòng)控制器是一款兼容 EtherCAT 總線(其中
2023-06-01 16:37:520 管理
軸運(yùn)動(dòng)操作界面直接調(diào)試伺服、步進(jìn)
虛擬控制器仿真,脫機(jī)開發(fā)
支持C#/C++......
動(dòng)態(tài)鏈接函數(shù)庫(kù)接口,彈性擴(kuò)展
2023-06-01 09:39:23
正運(yùn)動(dòng)MOVESYNC指令實(shí)現(xiàn)多軸同步跟隨功能。
2023-05-31 09:52:17661 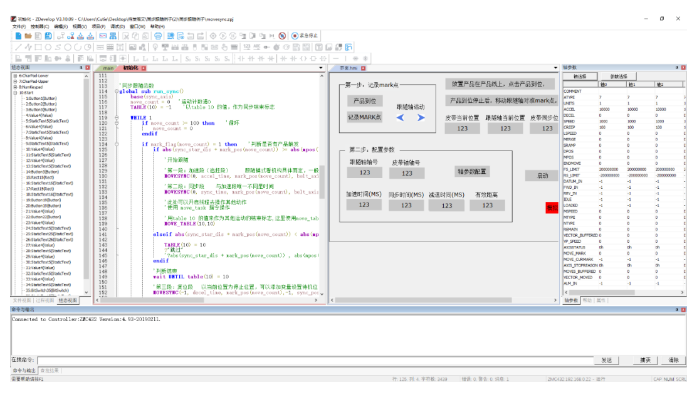
研究團(tuán)隊(duì)設(shè)計(jì)了以寬度神經(jīng)網(wǎng)絡(luò)為主體的微型機(jī)器人基本運(yùn)動(dòng)控制器;基于李雅普諾夫穩(wěn)定理論,推導(dǎo)了保障機(jī)器人運(yùn)動(dòng)穩(wěn)定的控制器網(wǎng)絡(luò)參數(shù)約束,簡(jiǎn)化了不同運(yùn)動(dòng)基元的控制器參數(shù)訓(xùn)練學(xué)習(xí)過程。
2023-05-30 10:21:45156 
ZMC004WEA 經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制器是一款兼容 EtherCAT 總線和脈沖型的獨(dú)立式運(yùn)動(dòng)控制器。控制器本身支持 4 軸,最多可擴(kuò)展至 6 軸,用以實(shí)現(xiàn)直線插補(bǔ)、圓狐插補(bǔ)、螺旋插補(bǔ)等簡(jiǎn)單的軌跡
2023-05-25 16:10:570 ZMC308E 高性能多軸運(yùn)動(dòng)控制器是一款兼容 EtherCAT 總線和脈沖型的獨(dú)立式運(yùn)動(dòng)控制器,控制器最多支持 12 軸的復(fù)雜連續(xù)軌跡控制需求。ZMC3 系列高性能多軸運(yùn)動(dòng)控制器可用于機(jī)器人
2023-05-24 15:43:040 實(shí)現(xiàn)實(shí)時(shí)的運(yùn)動(dòng)控制。集成了 1 個(gè)以太網(wǎng)口,支持 ETHERNET、CAN、RS232 通訊、36 路通用數(shù)字輸入、12 路通用數(shù)字輸出、軸接口端子。CAN 總線接口支持通過 ZCAN 協(xié)議來連接擴(kuò)展模塊。ECI1000 系列經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制卡可用于電子半導(dǎo)體設(shè)備(檢測(cè)類設(shè)備、組裝
2023-05-23 17:39:000 ZMC 是正運(yùn)動(dòng)技術(shù)推出的網(wǎng)絡(luò)運(yùn)動(dòng)控制器型號(hào)簡(jiǎn)稱。ZMC303 高性能多軸運(yùn)動(dòng)控制器是一款脈沖型的獨(dú)立式運(yùn)動(dòng)控制器,控制器本身最多支持 3 軸,可擴(kuò)展到 10 軸的復(fù)雜連續(xù)軌跡控制需求。ZMC3
2023-05-17 15:38:340 總線和脈沖型的獨(dú)立式運(yùn)動(dòng)控制器,控制器本身支持 8 軸運(yùn)動(dòng)控制,最多可支持 12 軸運(yùn)動(dòng)控制,用以實(shí)現(xiàn)點(diǎn)位運(yùn)動(dòng)、直線運(yùn)動(dòng)、電子凸輪等控制需求。?XPLC864E 經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制器可用于電子半導(dǎo)體設(shè)備(檢測(cè)類設(shè)備、組裝類設(shè)備、鎖附類設(shè)備、焊錫機(jī))、點(diǎn)膠設(shè)備、非標(biāo)設(shè)備、印刷包裝設(shè)備
2023-05-17 14:47:260 當(dāng)數(shù)字信息轉(zhuǎn)化為精確的物理運(yùn)動(dòng)時(shí),以前不可行的應(yīng)用突然變得有可能實(shí)現(xiàn)。這進(jìn)一步加強(qiáng)了工業(yè)4.0在高級(jí)機(jī)器人、物聯(lián)網(wǎng) (IoT) 和工業(yè)物聯(lián)網(wǎng) (IIoT)、電池供電的醫(yī)療設(shè)備、增材制造和假肢
2023-05-17 09:22:18288 本文以正運(yùn)動(dòng)技術(shù)具備專用手輪接口的運(yùn)動(dòng)控制器ZMC408CE為例,介紹手輪、手輪的作用及原理、控制器手輪接口接線以及手輪程序配置。
2023-05-15 10:12:18843 
總線和脈沖型的獨(dú)立式運(yùn)動(dòng)控制器,控制器本身支持 8 軸運(yùn)動(dòng)控制,最多可支持 12 軸運(yùn)動(dòng)控制,用以實(shí)現(xiàn)點(diǎn)位運(yùn)動(dòng)、直線運(yùn)動(dòng)、電子凸輪等控制需求。?XPLC108E 經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制器可用于電子半導(dǎo)體設(shè)備(檢測(cè)類設(shè)備、組裝類設(shè)備、鎖附類設(shè)備、焊錫機(jī))、點(diǎn)膠設(shè)備、非標(biāo)設(shè)備、印刷包裝設(shè)備
2023-05-12 15:36:270 首先是運(yùn)動(dòng)控制器產(chǎn)品的復(fù)雜性。運(yùn)動(dòng)控制器可以分為PLC、專用控制器和PC-based運(yùn)動(dòng)控制器,PC-based運(yùn)動(dòng)控制器內(nèi)部還分成三大細(xì)分種類。
2023-05-12 14:37:10240 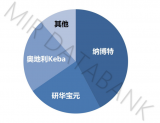
相關(guān)參數(shù)的配置,EtherCAT總線初始化操作,以及初始化成功以后的運(yùn)動(dòng)控制。
一、XPLC006E功能簡(jiǎn)介
XPLC006E是正運(yùn)動(dòng)運(yùn)動(dòng)控制器推出的一款多軸經(jīng)濟(jì)型EtherCAT總線運(yùn)動(dòng)控制器
2023-05-11 09:49:04
ZMC408SCAN 激光振鏡運(yùn)動(dòng)控制器是正運(yùn)動(dòng)技術(shù)推出的高性能總線雙振鏡運(yùn)動(dòng)控制器,專為工業(yè)激光+振鏡+運(yùn)動(dòng)控制方面的應(yīng)用而設(shè)計(jì),通過 EtherCAT 總線和脈沖軸接口能實(shí)現(xiàn)多軸運(yùn)動(dòng)控制
2023-05-10 15:06:30
運(yùn)動(dòng)控制器就是控制電動(dòng)機(jī)的運(yùn)行方式:比如電動(dòng)機(jī)在由行程開關(guān)控制交流接觸器而實(shí)現(xiàn)電動(dòng)機(jī)拖動(dòng)物體向上運(yùn)行達(dá)到指定位置后又向下運(yùn)行,或者用時(shí)間繼電器控制電動(dòng)機(jī)正反轉(zhuǎn)或轉(zhuǎn)一會(huì)停一會(huì)再轉(zhuǎn)一會(huì)再停。
運(yùn)動(dòng)
2023-05-09 14:43:031009 運(yùn)動(dòng)控制器就是控制電動(dòng)機(jī)的運(yùn)行方式專用控制器:比如電動(dòng)機(jī)在由行程開關(guān)控制交流接觸器而實(shí)現(xiàn)電動(dòng)機(jī)拖動(dòng)物體向上運(yùn)行達(dá)到指定位置后又向下運(yùn)行,或者用時(shí)間繼電器控制電動(dòng)機(jī)正反轉(zhuǎn)或轉(zhuǎn)一會(huì)停一會(huì)再轉(zhuǎn)一會(huì)
2023-05-09 14:41:02707 實(shí)際上是形成運(yùn)動(dòng)的速度和位置的基準(zhǔn)量。合適的基準(zhǔn)量不但可以改善軌跡的精度,而且其影響作用還可以降低對(duì)轉(zhuǎn)動(dòng)系統(tǒng)以及機(jī)械傳遞元件的要求。通用運(yùn)動(dòng)控制器通常都提供基于對(duì)沖擊、加速度和速度等這些可影響動(dòng)態(tài)軌跡精度的量值加以限制的運(yùn)動(dòng)規(guī)劃方法,用戶可以直接調(diào)用相應(yīng)的函數(shù)。
2023-05-09 14:39:50636 一個(gè)多軸運(yùn)動(dòng)控制系統(tǒng)由高階的運(yùn)動(dòng)控制器(motioncontroller)與低階的伺服驅(qū)動(dòng)器(servodriver)所組成,運(yùn)動(dòng)控制器負(fù)責(zé)運(yùn)動(dòng)控制命令譯碼、各個(gè)位置控制軸彼此間的相對(duì)運(yùn)動(dòng)、加減
2023-05-09 10:56:39972 
ZMC416BE 高性能多軸運(yùn)動(dòng)控制器是一款兼容 EtherCAT 總線和脈沖型的獨(dú)立式運(yùn)動(dòng)控制器,控制器本身最多支持 16 軸,可擴(kuò)展到 32 軸的復(fù)雜的連續(xù)軌跡控制需求。ZMC4 系列高性能
2023-04-27 14:59:140 1、什么是運(yùn)動(dòng)控制器運(yùn)動(dòng)控制器就是控制電動(dòng)機(jī)的運(yùn)行方式專用控制器:比如電動(dòng)機(jī)在由行程開關(guān)控制交流接觸器而實(shí)現(xiàn)電動(dòng)機(jī)拖動(dòng)物體向上運(yùn)行達(dá)到指定位置后又向下運(yùn)行,或者用時(shí)間繼電器控制電動(dòng)機(jī)正反轉(zhuǎn)或轉(zhuǎn)一會(huì)
2023-04-25 11:22:211741 ZMC464 高性能多軸運(yùn)動(dòng)控制器是一款兼容 EtherCAT 總線和脈沖型的獨(dú)立式運(yùn)動(dòng)控制器,控制器本身最多支持 64 軸的復(fù)雜的連續(xù)軌跡控制需求。ZMC464 高性能多軸運(yùn)動(dòng)控制器可用于機(jī)器人
2023-04-23 10:35:090 ZMC是正運(yùn)動(dòng)技術(shù)推出的網(wǎng)絡(luò)運(yùn)動(dòng)控制器型號(hào)簡(jiǎn)稱。ZMC4系列支持正運(yùn)動(dòng)XPLC的功能,可以通過網(wǎng)絡(luò)來做組態(tài)顯示。ZMC460高性能多軸運(yùn)動(dòng)控制器是一款兼容EtherCAT總線和脈沖型的獨(dú)立式運(yùn)動(dòng)
2023-04-21 15:43:070 運(yùn)動(dòng)控制器就是控制電動(dòng)機(jī)的運(yùn)行方式專用控制器:比如電動(dòng)機(jī)在由行程開關(guān)控制交流接觸器而實(shí)現(xiàn)電動(dòng)機(jī)拖動(dòng)物體向上運(yùn)行達(dá)到指定位置后又向下運(yùn)行,或者用時(shí)間繼電器控制電動(dòng)機(jī)正反轉(zhuǎn)或轉(zhuǎn)一會(huì)停一會(huì)再轉(zhuǎn)一會(huì)再停。
2023-04-21 10:14:31739 ZMC006CE 經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制器是一款兼容 EtherCAT 總線和脈沖型的獨(dú)立式運(yùn)動(dòng)控制器。控制器本身最多支持 6 軸,可擴(kuò)展至 12 軸,用以實(shí)現(xiàn)直線插補(bǔ)、圓狐插補(bǔ)、螺旋插補(bǔ)等簡(jiǎn)單的軌跡
2023-04-20 16:53:410 ZMC是正運(yùn)動(dòng)技術(shù)推出的網(wǎng)絡(luò)運(yùn)動(dòng)控制器型號(hào)簡(jiǎn)稱。ZMC408CE高性能多軸運(yùn)動(dòng)控制器是一款兼容EtherCAT總線和脈沖型的獨(dú)立式運(yùn)動(dòng)控制器,控制器本身最多支持8軸,可擴(kuò)展到32軸的復(fù)雜的連續(xù)軌跡
2023-04-17 11:27:350 ZMC 是正運(yùn)動(dòng)技術(shù)推出的網(wǎng)絡(luò)運(yùn)動(dòng)控制器型號(hào)簡(jiǎn)稱。
ZMC4 系列支持正運(yùn)動(dòng) XPLC 的功能,可以通過網(wǎng)絡(luò)來做組態(tài)顯示。
ZMC432 高性能多軸運(yùn)動(dòng)控制器是一款兼容 EtherCAT 總線
2023-04-13 09:10:270 ZMC 是正運(yùn)動(dòng)技術(shù)推出的網(wǎng)絡(luò)運(yùn)動(dòng)控制器型號(hào)簡(jiǎn)稱。
ZMC4 系列支持正運(yùn)動(dòng) XPLC 的功能,可以通過網(wǎng)絡(luò)來做組態(tài)顯示。
ZMC420SCAN 系列激光振鏡運(yùn)動(dòng)控制器是一款集成了激光控制
2023-04-11 14:28:283 ZMC408SCAN 激光振鏡運(yùn)動(dòng)控制器是正運(yùn)動(dòng)技術(shù)推出的高性能總線雙振鏡運(yùn)動(dòng)控制器,專為工業(yè)激光+ 振鏡+運(yùn)動(dòng)控制方面的應(yīng)用而設(shè)計(jì),通過 EtherCAT 總線和脈沖軸接口能實(shí)現(xiàn)多軸運(yùn)動(dòng)控制
2023-04-11 14:22:443 運(yùn)動(dòng)控制器主要分為三類,分別是PC-based、專用控制器、PLC。其中PC-based運(yùn)動(dòng)控制器在電子、EMS等行業(yè)被廣泛應(yīng)用;專用控制器的代表行業(yè)是風(fēng)電、光伏、機(jī)器人、成型機(jī)械等等;PLC則在橡膠、汽車、冶金等行業(yè)備受青睞。
2023-04-10 12:56:431435 本次介紹一款XYZ三維運(yùn)動(dòng)、電容傳感器閉環(huán)的壓電納米定位臺(tái)及相應(yīng)控制器,該電容運(yùn)動(dòng)臺(tái)的型號(hào)為P12.XYZ100C,控制器型號(hào)為E00.D11AL。 P12.XYZ100C壓電納米定位
2023-04-08 08:53:381024 
C#對(duì)雷賽運(yùn)動(dòng)控制卡的應(yīng)用案例1:定長(zhǎng)運(yùn)動(dòng)2:連續(xù)運(yùn)動(dòng)3:插補(bǔ)運(yùn)動(dòng)4:PVT運(yùn)動(dòng)5:手輪運(yùn)動(dòng)6:回原點(diǎn)運(yùn)動(dòng)7:IO8:AD-DA9:高速位置比較+鎖存
2023-03-31 15:13:020 運(yùn)動(dòng)控制一直是以PLC、PC-based、專用控制器三分天下的形式各自發(fā)展,三者的市場(chǎng)份額也一直伴隨著不同市場(chǎng)的應(yīng)用發(fā)生著變化。
2023-03-25 09:11:12303 步進(jìn)電機(jī)運(yùn)動(dòng)控制器
2023-03-24 15:11:47
步進(jìn)電機(jī)運(yùn)動(dòng)控制器
2023-03-23 04:52:55
 電子發(fā)燒友App
電子發(fā)燒友App



















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論