直流模塊并聯的方案很多,但用于電力操作電源,卻存在著一些缺陷:如輸出阻抗法的均流精度太低;主從設置法和平均電流法都無法實現冗余技術,使并聯電源模塊系統的可靠性得不到很好的保證;而自主均流法依據特有的性能,如:“均流精度高,動態響應好,可以實現冗余技術等”,越來越受到廣大產品開發人員的青睞。
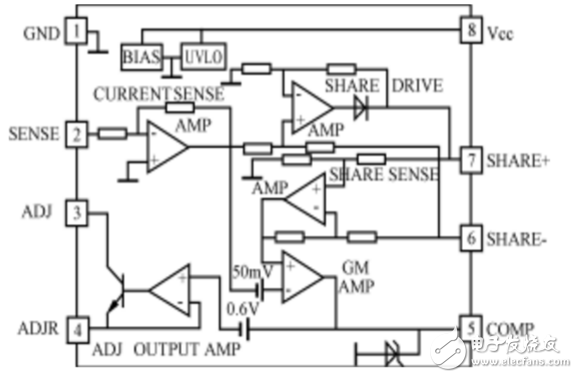
針對自主均流法的特點,UC公司開發出了集成芯片UC3902,其外形為八個管腳,管腳編號及功能如圖1所示。電流最大的模塊被自動確定為主模塊,主模塊驅使均流母線電壓與它的輸出電流成比例。從模塊以均流母線電壓為基準,達到每個模塊均分電流的目的。
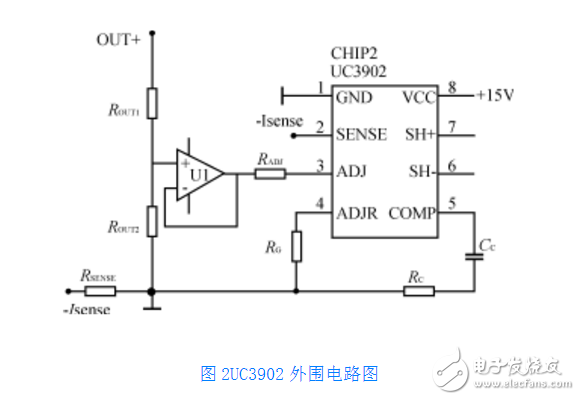
UC3902的外圍電路如圖2所示。此芯片只需要很少的外部元器件。在這些元器件的值被計算之前,模塊變換器中的三個參數必須知道:
(1)VONOM即額定輸出電壓;
? ? ? ? (2)IOmax即最大輸出電流;
(3)ΔVOmax最大輸出電壓調節范圍。
模塊之間為了精確均流,每個模塊輸出電流必須被檢測。電流檢測電阻RSENSE,檢測一負信號輸入到電流檢測放大器反向端。對檢測電阻的選擇基于以下兩個因素:①最大功耗;②通過檢測電阻的最大壓降。功耗受效率、器件的額定功率的限制。最大壓降必須與芯片內部對信號的限制相對應,很重要的一點是防止電流檢測放大器的飽和,放大器輸出的最高電壓VCSAO是VCC的函數,根據芯片提供的資料和實際調試的經驗,取5V~10V為宜,相應可得:
![]()
(1)式中電流檢測放大器的增益ACSA=40。
![]()
(2)IADJmax,根據經驗應工作在5mA~10mA之間,因為較低一點的值可能引起系統對噪音的敏感,但不能超過10mA。它的實際電流由ADJR管腳上可能的最高電壓(2.6V)和連接在ADJR管腳與地之間的電阻RG來決定,這樣:
![]()
(3)RADJ是電源檢測線正端的阻抗,它的值是ΔVOmax與IADJmax的函數,又由于檢測電阻降低了輸出電壓的調整范圍,所以:
![]()
(4)所有并聯單元的均流環是負反饋控制環,為了可靠地工作,負反饋控制環必須服從穩定性原則。均流環加在已存在的單個模塊電源上,所以必須避免各控制環之間的干擾。為了保證電壓環的穩定性,均流環的交越頻率至少低于電壓環交越頻率的10倍,這樣均流環在電壓環交越頻率處被最小化。
可以用以下的傳遞函數,對網絡進行分析:APWR:電壓環的傳遞函數。
AVo→Vis:這個增益術語描述的是輸出電壓和檢測電阻上的電壓之間的關系,它隨著負載阻抗的變化而變化:
![]() AVo→Vis=
AVo→Vis=
(5)ACSA:電流檢測放大器增益,大小為40。
AEA=GM·XCOMP
(6)式中GM為跨導,XCOMP為復頻函數補償器件的阻抗。
AADJ:調節電路增益。
![]()
(7)所以均流環增益:
ASH=APWRAVo→VisACSAASHAAEAAADJ(8
ASHA:均流驅動和均流檢測放大器增益1。
AEA:誤差放大器的增益。