ESP主要運用在汽車電控中,ESP中的加速度傳感器沿汽車前進方向的縱向加速度傳感器。下面就為你介紹ESP系統中常用傳感器的結構或者信號的特性和一些問題的解決法法,并設計了各個傳感器的信號處理接口。
ESP(電子穩定程序)是汽車電控的一個標志性發明。不同的研發機構對這一系統的命名不盡相同,如博世(BOSCH)公司早期稱為汽車動力學控制(VDC),現在博世、梅賽德—奔馳公司稱為ESP;豐田公司稱為汽車穩定性控制系統(VSC)、汽車穩定性輔助系統(VSA)或者汽車電子穩定控制系統(ESC);寶馬公司稱為動力學穩定控制系統(DSC)。盡管名稱不盡相同,但都是在傳統的汽車動力學控制系統,如ABS和TCS的基礎上增加一個橫向穩定控制器,通過控制橫向和縱向力的分布和幅度,以便控制任何路況下汽車的動力學運動模式,從而能夠在各種工況下提高汽車的動力性能。
本文介紹的是ESP中傳感器以及接口技術的電路解析:
電路原理
方向盤轉角傳感器接口
方向盤轉角傳感器的輸出為正交編碼脈沖。正交編碼脈沖包含兩個脈沖序列,有變化的頻率和四分之一周期(90°)的固定相位偏移,如圖1所示。通過檢測2路信號的相位關系可以判斷為順時針方向和逆時針方向,并據此對信號進行加/減計數,從而得到當前的計數累計值,也即方向盤的絕對轉角,而轉角的變化率即角速度,則可通過信號頻率測出。另外,方向盤轉角傳感器有一個零位輸出信號,當方向盤在中間位置時,該信號輸出0V,否則輸出5V,通過該信號,可對絕對轉角進行在線校準。
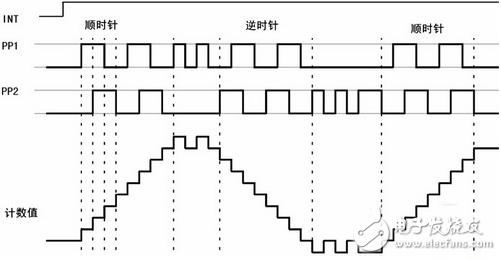
圖1 方向盤轉角傳感器脈沖序列波形
C164CI 與方向盤轉角傳感器的接口電路如圖2所示。片內內置增量編碼的正交解碼器,該解碼器使用定時器3的兩個引腳(T3IN、T3EUD)作為正交脈沖的輸入,在正確設置相關寄存器后,定時器3的數據寄存器的值與方向盤轉角成正比,故可方便的計算轉角,本文所使用的方向盤轉角傳感器每一圈對應44個脈沖,設定時器3的數據寄存器為T3,則絕對轉角為。
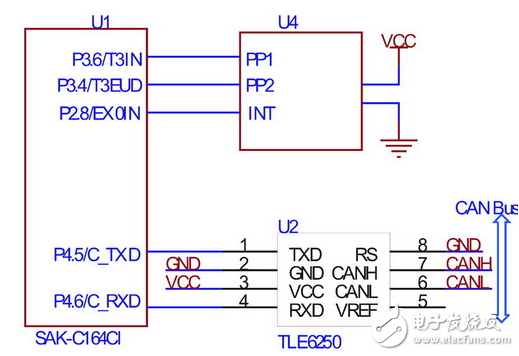
圖2 方向盤轉角傳感器接口電路
進行差分運算,即可得到轉角變化速率。微控制器把計算得到的參數通過CAN發送給ECU。
輪速傳感器接口
根據前面部分介紹的輪速傳感器信號特點,設計接口電路如圖3所示。
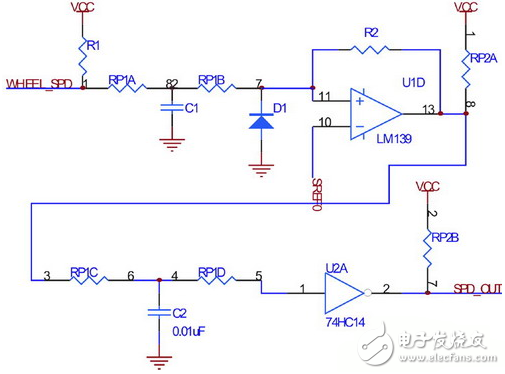
圖3 輪速傳感器接口電路
電路采用兩級濾波和整形,以保證輪速信號在極低轉速下不會丟失,同時避免因懸架振動引起的信號干擾。圖中由電阻R2引入第一級遲滯比較,而使用74HC14引入第二級遲滯比較。
橫擺角速度、縱向/橫向加速度傳感器
橫擺角速度、縱向/橫向加速度傳感器的安裝位置基本相同,輸出都是0V-5V的模擬量,由于汽車顛簸造成的信號波動特性一致,故封裝在同一模塊中。其硬件接口如圖4示,實現硬件模擬前置濾波,以抑制來自傳感器的模擬信號中的高頻噪聲成分,防止在采樣過程中出現混疊現象。
調整圖4中各個阻容元件的參數,即可設置濾波截止頻率和延時大小。汽車運行過程中,在較好路面上行駛時,由于信號較好,延時盡量要小,而在顛簸路面上行駛,則希望濾波效果要好。但是由于硬件濾波的頻率特性一經設計完畢,無法實時修改,故需要在軟件中設計數字濾波環節。數字濾波常用的有維納濾波器、卡爾曼濾波器、線性預測器、自適用濾波器等。在這里選用計算量小、實時性能好的一階低通濾波。
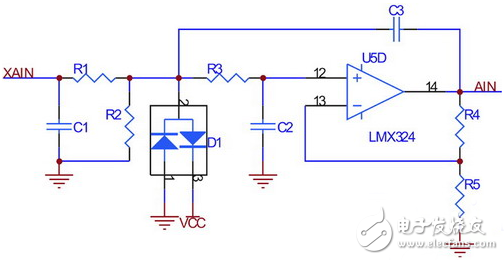
圖4 橫擺角速度、縱向/橫向加速度傳感器接口電路
本文討論了ESP系統中常用傳感器的結構特點及信號特性,并設計了各個傳感器的信號處理接口,其中包括硬件接口電路以及軟件處理方案。設計了包含橫擺角速度、縱向/橫向加速度傳感器的集成模塊,通過CAN總線與ECU進行數據傳輸,具有較好的抗干擾性和可靠性。