?
霍爾傳感器是根據霍爾效應制作的一種磁場傳感器。霍爾效應是磁電效應的一種,這一現象是霍爾(A.H.Hall,1855—1938)于1879年在研究金屬的導
電機構時發現的。后來發現
半導體、導
電流體等也有這種效應,而半導體的霍爾效應比金屬強得多,利用這現象制成的各種霍爾元件,廣泛地應用于
工業自動化技術、
檢測技術及
信息處理等方面。霍爾效應是研究半導體材料性能的基本方法。通過霍爾效應實驗測定的霍爾系數,能夠判斷半導體材料的導電類型、載流子濃度及載流子遷移率等重要
參數。
?
?
磁場中有一個霍爾半導體片,恒定電流I從A到B通過該片。在洛侖茲力的作用下,I的
電子流在通過霍爾半導體時向一側偏移,使該片在CD方向上產生電位差,這就是所謂的霍爾電壓。
?
霍爾電壓隨磁場強度的變化而變化,磁場越強,電壓越高,磁場越弱,電壓越低,霍爾電壓值很小,通常只有幾個毫伏,但經
集成電路中的
放大器放大,就能使該電壓放大到足以輸出較強的
信號。若使霍爾集成電路起傳感作用,需要用
機械的方法來改變磁感應強度。下圖所示的方法是用一個轉動的葉輪作為控制磁通量的開關,當葉輪葉片處于磁鐵和霍爾集成電路之間的氣隙中時,磁場偏離集成片,霍爾電壓消失。這樣,霍爾集成電路的輸出電壓的變化,就能表示出葉輪驅動軸的某一位置,利用這一工作原理,可將霍爾集成電路片用作用點火正時傳感器。霍爾效應傳感器屬于被動型傳感器,它要有外加
電源才能工作,這一特點使它能檢測轉速低的運轉情況。
?
霍爾效應
?
霍爾效應從本質上講是運動的帶電粒子在磁場中受洛侖茲力作用引起的偏轉。當帶電粒子(電子或空穴)被約束在固體材料中,這種偏轉就導致在垂直電流和磁場的方向上產生正負電荷的聚積,從而形成附加的橫向電場。對于圖一所示的半導體試樣,若在X方向通以電流Is,在Z方向加磁場B,則在Y方向即試樣A,A′電極兩側就開始聚積異號電荷而產生相應的附加電場。電場的指向取決定于測試樣品的電類型。顯然,該電場是阻止載流子繼續向側面偏移,
?
當載流子所受的橫向電場力eEH與洛侖茲力相等時,樣品兩側電荷的積累就達到平衡,故有
?
⑴
?
其中EH為霍爾電場,V是載流子在電流方向上的平均漂移速度。設試樣的寬為b,厚度為d,載流子濃度為n,則
?
⑵
?
由⑴、⑵兩式可得
?
⑶
?
即霍爾電壓VH(A、A′電極之間的電壓)與ISB乘積正比與試樣厚度d成反比。比例系數 稱為霍爾系數,它是反映材料霍爾效應強弱的重要參數,只要測出 VH(伏)以及知道IIs(安)、B(高斯)和d(厘 米)可按下式計算RH(厘米3/庫侖)
?
分類
?
霍爾傳感器分為線型霍爾傳感器和開關型霍爾傳感器兩種。
?
(一)開關型霍爾傳感器由穩壓器、霍爾元件、
差分放大器,斯密特觸發器和輸出級組成,它輸出數字量。開關型霍爾傳感器還有一種特殊的形式,稱為鎖鍵型霍爾傳感器。
?
(二)線性型霍爾傳感器由霍爾元件、線性放大器和射極跟隨器組成,它輸出
模擬量。
?
線性霍爾傳感器又可分為開環式和閉環式。閉環式霍爾傳感器又稱零磁通霍爾傳感器。線性霍爾傳感器主要用于交直流電流和電壓測量。。
?
開關型
?
如圖4所示,其中Bnp為工作點“開”的磁感應強度,BRP為釋放點“關”的磁感應強度。當外加的磁感應強度超過動作點Bnp時,傳感器輸出低電平,當磁感應強度降到動作點Bnp以下時,傳感器輸出電平不變,一直要降到釋放點BRP時,傳感器才由低電平躍變為高電平。Bnp與BRP之間的滯后使開關動作更為可靠。
?
鎖鍵型
?
如圖5所示,當磁感應強度超過動作點Bnp時,傳感器輸出由高電平躍變為低電平,而在外磁場撤消后,其輸出狀態保持不變(即鎖存狀態),必須施加反向磁感應強度達到BRP時,才能使電平產生變化。
?
線性型
?
輸出電壓與外加磁場強度呈線性關系,如圖3所示,可見,在B1~B2的磁感應強度范圍內有較好的線性度,磁感應強度超出此范圍時則呈現飽和狀態。
?
開環式電流傳感器
?
由于通電螺線管內部存在磁場,其大小與導線中的電流成正比,故可以利用霍爾傳感器測量出磁場,從而確定導線中電流的大小。利用這一原理可以設計制成霍爾電流傳感器。其優點是不與被測電路發生電接觸,不影響被測電路,不消耗被測電源的功率,特別適合于大電流傳感。
?
霍爾電流傳感器工作原理如圖6所示,標準圓環鐵芯有一個缺口,將霍爾傳感器插入缺口中,圓環上繞有線圈,當電流通過線圈時產生磁場,則霍爾傳感器有信號輸出。
?
閉環式電流傳感器
?
磁平衡式電流傳感器也叫霍爾閉環電流傳感器,也稱補償式傳感器,即主回路被測電流Ip在聚磁環處所產生的磁場通過一個次級線圈,電流所產生的磁場進行補償, 從而使霍爾器件處于檢測零磁通的工作狀態。
?
磁平衡式電流傳感器的具體工作過程為:當主回路有一電流通過時,在導線上產生的磁場被聚磁環聚集并感應到霍爾器件上, 所產生的信號輸出用于驅動相應的功率管并使其導通,從而獲得一個補償電流Is。 這一電流再通過多匝繞組產生磁場 ,該磁場與被測電流產生的磁場正好相反,因而補償了原來的磁場, 使霍爾器件的輸出逐漸減小。當與Ip與匝數相乘 所產生的磁場相等時,Is不再增加,這時的霍爾器件起指示零磁通的作用 ,此時可以通過Is來平衡。被測電流的任何變化都會破壞這一平衡。 一旦磁場失去平衡,霍爾器件就有信號輸出。經功率放大后,立即就有相應的電流流過次級繞組以對失衡的磁場進行補償。從磁場失衡到再次平衡,所需的時間理論上不到1μs,這是一個動態平衡的過程。
這三種傳感器中,模擬霍爾和霍爾磁力傳感器的S引腳輸出的是模擬值,線性霍爾的A0引腳輸出的是模擬值,D0引腳輸出的是開關量。
采用下面的代碼分別對這三種傳感器的模擬值引腳輸出進行監測。
const int buttonPin = A0;
int inputValue = 0;
void setup() {
pinMode(buttonPin, INPUT);
digitalWrite(buttonPin,LOW);
Serial.begin(9600);
}
void loop() {
inputValue = analogRead(buttonPin);
Serial.println(inputValue);
}
將輸出值放到matlab中創建圖形,圖形分別如下:
模擬霍爾傳感器的模擬引腳輸出圖形如下,這是用手拿著磁鐵從遠及近靠近傳感器產生的模擬值圖形,曲線最低處是磁鐵與傳感器距離最近時的輸出。
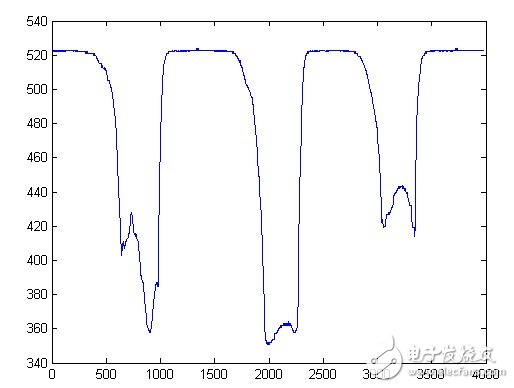
霍爾磁力傳感器的模擬引腳輸出圖形如下,這是用手拿著磁鐵多次從遠及近靠近傳感器產生的模擬值圖形,曲線最低處是磁鐵與傳感器距離最近時的輸出。
線性霍爾傳感器的模擬引腳輸出圖形如下,這是用手拿著磁鐵多次從遠及近靠近傳感器產生的模擬值圖形,曲線最低處是磁鐵與傳感器距離最近時的輸出。
由于線性霍爾傳感器和霍爾磁力傳感器上自帶有測試LED(線性霍爾傳感器上帶綠色LED,霍爾磁力傳感器上帶紅色LED),當傳感器接近磁鐵時,測試LED燈會自動變亮,所以就沒有寫另外的測試程序了(如果要寫的話,就是檢測傳感器模擬引腳值,當小于某一值時點亮LED燈)。只是做了一個簡單的測試視頻,視頻如下:
PS:模擬霍爾傳感器正面接觸磁鐵時,模擬引腳輸出值最低(下左圖),反面接觸時最高(下右圖),另外兩類傳感器與模擬霍爾傳感器正好相反。