激光測距(laser distance measuring)是以激光器作為光源進行測距。根據激光工作的方式分為連續激光器和脈沖激光器。氦氖、氬離子、氪鎘等氣體激光器工作于連續輸出狀態,用于相位式激光測距;雙異質砷化鎵半導體激光器,用于紅外測距;紅寶石、釹玻璃等固體激光器,用于脈沖式激光測距。激光測距儀由于激光的單色性好、方向性強等特點,加上電子線路半導體化集成化,與光電測距儀相比,不僅可以日夜作業、而且能提高測距精度。
激光測距儀是利用激光對目標的距離進行準確測定(又稱激光測距)的儀器。激光測距儀在工作時向目標射出一束很細的激光,由光電元件接收目標反射的激光束,計時器測定激光束從發射到接收的時間,計算出從觀測者到目標的距離。
若激光是連續發射的,測程可達40公里左右,并可晝夜進行作業。若激光是脈沖發射的,一般絕對精度較低,但用于遠距離測量,可以達到很好的相對精度。
世界上第一臺激光器,是由美國休斯飛機公司的科學家梅曼于1960年,首先研制成功的。美國軍方很快就在此基礎上開展了對軍用激光裝置的研究。1961年,第一臺軍用激光測距儀通過了美國軍方論證試驗,對此后激光測距儀很快就進入了實用聯合體。
激光測距儀重量輕、體積小、操作簡單速度快而準確,其誤差僅為其它光學測距儀的五分之一到數百分之一,因而被廣泛用于地形測量,戰場測量,坦克,飛機,艦艇和火炮對目標的測距,測量云層、飛機、導彈以及人造衛星的高度等。它是提高坦克、飛機、艦艇和火炮精度的重要技術裝備。
由于激光測距儀價格不斷下調,工業上也逐漸開始使用激光測距儀。國內外出現了一批新型的具有測距快、體積小、性能可靠等優點的微型測距儀,可以廣泛應用于工業測控、礦山、港口等領域。
激光測距原理與方法
激光測距粗劃分為兩種,第一種原理大致是光速和往返時間的乘積的一半,就是測距儀和被測量物體之間的距離,以激光測距儀為例;第二種是以激光位移傳感器原理為原理的方法的。
激光的測量方法大致有三種,脈沖法(激光回波法),相位法,三角反射法。脈沖法測量距離的精度一般是在+/- 1米左右。另外,此類測距儀的測量盲區一般是15米左右。三角法用來測量2000mm以下短程距離(行業稱之為位移)時,精度最高可達1um。相位式激光測距一般應用在精密測距中,精度一般為毫米級。激光回波分析法則用于遠距離測量。
1第一類測距
如果光以速度c在空氣中傳播在A、B兩點間往返一次所需時間為t,則A、B兩點間距離D可用下列表示。
D=ct/2 式1.1
式中:
D——測站點A、B兩點間距離;
c——光在大氣中傳播的速度;
t——光往返A、B一次所需的時間。
由上式可知,要測量A、B距離實際上是要測量光傳播的時間t,根據測量時間方法的不同,激光測距儀通常可分為脈沖式和相位式兩種測量形式。
2 第二類測距
激光位移傳感器能夠利用激光的高方向性、高單色性和高亮度等特點可實現無接觸遠距離測量。激光位移傳感器(磁致伸縮位移傳感器)就是利用激光的這些優點制成的新型測量儀表,它的出現,使位移測量的精度、可靠性得到極大的提高,也為非接觸位移測量提供了有效的測量方法。
按照測量原理,激光位移傳感器原理分為激光三角測量法和激光回波分析法,激光三角測量法一般適用于高精度、短距離的測量,而激光回波分析法則用于遠距離測量。
3測量方法一:相位式激光測距
相位式激光測距儀是用無線電波段的頻率,對激光束進行幅度調制并測定調制光往返測線一次所產生的相位延遲,再根據調制光的波長,換算此相位延遲所代表的距離。即用間接方法測定出光經往返測線所需的時間。
若調制光角頻率為ω,在待測量距離D上往返一次產生的相位延遲為φ,則對應時間t 可表示為:
t=φ/ω 式3.1
將此關系代入(1.1)式距離D可表示為
D=1/2 ct=1/2 c·φ/ω=c/(4πf) (Nπ+Δφ) = c/4f (N+ ΔN )=U(N+) 式3.2
式中:
φ——信號往返測線一次產生的總的相位延遲。
ω——調制信號的角頻率,ω=2πf。
U——單位長度,數值等于1/4調制波長
N——測線所包含調制半波長個數。
Δφ——信號往返測線一次產生相位延遲不足π部分。
ΔN——測線所包含調制波不足半波長的小數部分。
ΔN=φ/ω
在給定調制和標準大氣條件下,頻率c/(4πf)是一個常數,此時距離的測量變成了測線所包含半波長個數的測量和不足半波長的小數部分的測量即測N或φ,由于近代精密機械加工技術和無線電測相技術的發展,已使φ的測量達到很高的精度。
為了測得不足π的相角φ,可以通過不同的方法來進行測量,通常應用最多的是延遲測相和數字測相,目前短程激光測距儀均采用數字測相原理來求得φ。
由上所述一般情況下相位式激光測距儀使用連續發射帶調制信號的激光束,為了獲得測距高精度還需配置合作目標,而目前推出的手持式激光測距儀是脈沖式激光測距儀中又一新型測距儀,它不僅體積小、重量輕,還采用數字測相脈沖展寬細分技術,無需合作目標即可達到毫米級精度,測程已經超過100m,且能快速準確地直接顯示距離。是短程精度精密工程測量、房屋建筑面積測量中最新型的長度計量標準器具。現應用最多的是leica公司生產的DISTO系列手持式激光測距儀。
4 測量方法二:脈沖式激光測距
脈沖激光測距簡單來說就是針對激光的飛行時間差進行測距,它是利用激光脈沖持續時間極短,能量在時間上相對集中,瞬時功率很大的特點進行測距。在有合作目標時,可以達到很遠的測程;在近距離測量(幾千米內)即使沒有合作目標,在精度要求不高的情況下也可以進行測距。該方法主要用于地形測量,戰術前沿測距,導彈運行軌道跟蹤,激光雷達測距,以及人造衛星、地月距離測量等。
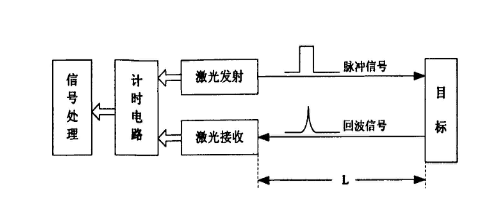
圖4.1脈沖式激光測距原理圖
脈沖式激光測距原理如圖4.1所示。由激光發射系統發出一個持續時間極短的脈沖激光,經過待測距離L之后,被目標物體反射,發射脈沖激光信號被激光接收系統中的光電探測器接收,時間間隔電路通過計算激光發射和回波信號到達之間的時間t,得出目標物體與發射出的距離L。
其精度取決于:激光脈沖的上升沿、接收通道帶寬、探測器信噪比和時間間隔精確度。
5 測量方法三:三角法激光測距
激光位移傳感器的測量方法稱為激光三角反射法,激光測距儀的精度是一定的,同樣的測距儀測10米與100米的精度是一樣的。而激光三角反射法測量精度是跟量程相關的,量程越大,精度越低。
激光測距的另一種原理是激光三角反射法原理:半導體激光器1被鏡片2聚焦到被測物體6。反射光被鏡片3收集,投射到CCD陣列4上;信號處理器5通過三角函數計算陣列4上的光點位置得到距物體的距離。
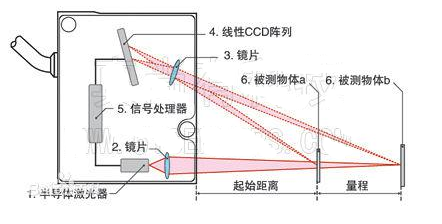
圖5.1激光三角法
激光發射器通過鏡頭將可見紅色激光射向物體表面,經物體反射的激光通過接受器鏡頭,被內部的CCD線性相機接受,根據不同的距離,CCD線性相機可以在不同的角度下“看見”這個光點。根據這個角度即知的激光和相機之間的距離,數字信號處理器就能計算出傳感器和被測物之間的距離。
同時,光束在接收元件的位置通過模擬和數字電路處理,并通過微處理器分析,計算出相應的輸出值,并在用戶設定的模擬量窗口內,按比例輸出標準數據信號。如果使用開關量輸出,則在設定的窗口內導通,窗口之外截止。另外,模擬量與開關量輸出可設置獨立檢測窗口。
常用在鐵軌、產品厚度、平整度、尺寸等方面。
6 測量方法四:激光回波法
激光位移傳感器采用回波分析原理來測量距離可以達到一定程度的精度。傳感器內部是由處理器單元、回波處理單元、激光發射器、激光接受器等部分組成。激光位移傳感器通過激光發射器每秒發射一百萬個脈沖到檢測物并返回至接收器,處理器計算激光脈沖遇到檢測物并返回接收器所需時間,以此計算出距離值,該輸出值是將上千次的測量結果進行的平均輸出。
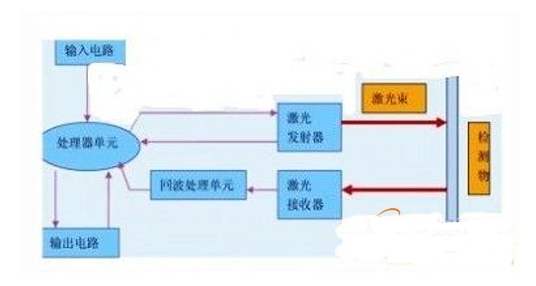
圖6.1 激光回波法
其原理與脈沖式激光測距類似,又稱脈沖回波法,用于激光位移傳感器。
7“安全”和“不安全”
目前,市場上的手持式激光測距儀的工作物質主要有以下幾種:工作波長為905納米和1540納米的半導體激光,工作波長為1064納米的YAG激光。1064納米的波長對人體皮膚和眼睛是害的,特別是如果眼睛不小心接觸到了1064納米波長的激光,對眼睛的傷害可能將是永久性的。所以,在國外,手持激光測距儀中,完全取締了1064納米的激光。在國內,某些廠家還有生產1064納米的激光測距儀。
對于905納米和1540納米的激光測距儀,我們就稱之為“安全”的。對于1064納米的激光測距儀,由于它對人體具有潛在的危害性,所以我們就稱之為“不安全”的。