拉壓力傳感器內(nèi)部結(jié)構(gòu)
微型S梁拉壓力傳感器原理結(jié)構(gòu):
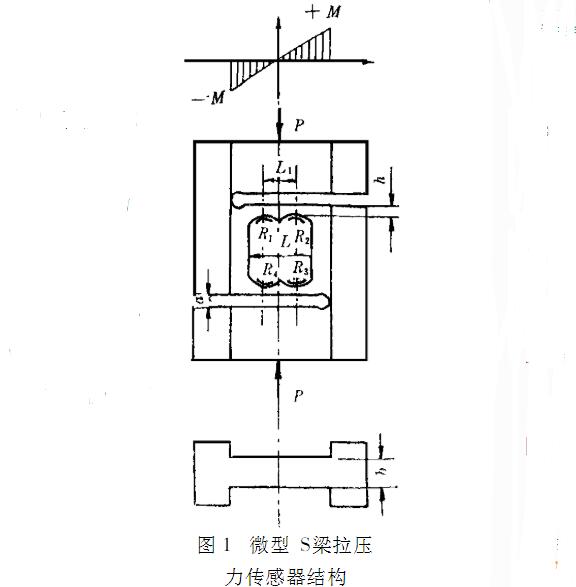
傳感器原理結(jié)構(gòu)根據(jù)骨外固定力測量的特點(diǎn),采用工藝成熟、對測量電路要求較低的電阻應(yīng)變式力傳感器。該傳感器關(guān)鍵元件之--的彈性體,采用S型梁式結(jié)構(gòu),如圖1所示。當(dāng)受壓力P時(shí),從彈性體中間開孔處上側(cè)梁的彎矩圖可看出,沿X軸方向彎矩有負(fù)到正的變化,而開孔處下側(cè)梁的彎矩則相反。選擇合適的貼片位置及組橋方法,不僅能抵消側(cè)向力輸出,力作用點(diǎn)的變化也不影響測量結(jié)果,這正是骨外力測量所必須的。傳感器彈性體的設(shè)計(jì),主要是敏感部分長度|、厚度h、寬度b和剛接部位的剛度的選擇。既要傳感器體積小、線性好及適宜的靈敏度,還要使剛接部位剛度足夠大,在力P作用下不產(chǎn)生自由轉(zhuǎn)動(dòng)。
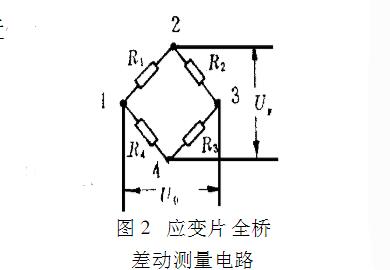
此時(shí)最大彎矩微型S梁拉壓力傳感器結(jié)構(gòu)生自由轉(zhuǎn)動(dòng)。此時(shí)最大彎矩[2]Mmax=PI2最大應(yīng)力在彈性體中部長方孔的弧頂,即圖1中電阻應(yīng)變片R1、R2、R3、R4的粘貼處,則最大應(yīng)力emax=MW=3Pl1bh2(1)最大應(yīng)變Xmax=emaxE=3Pl1Ebh2(2)四個(gè)應(yīng)變片組成全橋差動(dòng)電路,如圖2所示。傳感器彈性體材料選用硬鋁合金,其彈性模量E=70x103N/mm2。將有關(guān)尺寸代入(2)式,得到10N時(shí)R1處應(yīng)變X=54x10-6。
拉壓力傳感器的原理
首先,在拉壓力傳感器工作過程中我們會(huì)見到的指標(biāo)有線性度、靈敏度、遲滯、重復(fù)性與漂移這五個(gè)。線性度所描述的是傳感器輸入/輸出的實(shí)際函數(shù)與其擬合直線之間的偏離程度,其數(shù)值為兩者之間的最大偏差與滿量程輸出值的比值。靈敏度比較好理解,是指輸出量的增加值(即增量)與引起該增加值的相應(yīng)變量的增加量的比值,也是一個(gè)用來描述傳感器特性的重要指標(biāo)。 遲滯是指在輸入量由大到小變化,或由小變大變化時(shí),造成兩者特性曲線不相符的差值。重復(fù)性則指的是傳感器同一方向變化的輸入量,在多次試驗(yàn)中特性曲線的差別程度。最后一個(gè)漂移,描述的則是保持輸入不變,輸出量會(huì)隨著時(shí)間有所波動(dòng)的現(xiàn)象。
拉壓力傳感器通過力敏器件檢測其所受到的力的變化,并通過拉力傳遞結(jié)構(gòu)來傳遞力的物理信號(hào)。 也就是說,彈性體在產(chǎn)生彈性形變時(shí),使傳遞器這一轉(zhuǎn)換元件(通常為電阻應(yīng)變片)也產(chǎn)生形變,而此時(shí)電阻應(yīng)變片的阻值將發(fā)生變化,這種變化將轉(zhuǎn)變?yōu)殡娦盘?hào)被輸出。
以數(shù)顯電子秤為例,它的電路中包含了一個(gè)測量電路,與信號(hào)放大電路,測量電路能將電阻的阻值變量轉(zhuǎn)換成電壓信號(hào),而這種信號(hào)往往是弱電信號(hào),并不能直觀、準(zhǔn)確地反應(yīng)出變化的大小。 通過放大電路,這種信號(hào)即可被放大并輸出數(shù)顯面板表。