0. 引言
近年來,多傳感器融合算法發(fā)展迅猛,不同傳感器可以相互補(bǔ)充,通過融合提高系統(tǒng)的感知能力。但受限于標(biāo)定成本和時(shí)間同步問題,多傳感器數(shù)據(jù)集卻不多。在2022 IROS論文"FusionPortable: A Multi-Sensor Campus-Scene Dataset for Evaluation of Localization and Mapping Accuracy on Diverse Platforms"中,作者提出了一個(gè)包含RGB相機(jī)、事件相機(jī)、IMU、激光雷達(dá)以及RTK-GPS的多傳感器融合數(shù)據(jù)集。此外,文章中包含了大量的傳感器標(biāo)定方法和建立數(shù)據(jù)集所需要考慮的方方面面,進(jìn)行傳感器和數(shù)據(jù)集標(biāo)定工作的小伙伴一定不要錯(cuò)過。
2. 摘要
結(jié)合多個(gè)傳感器使機(jī)器人能夠最大限度地感知環(huán)境,并增強(qiáng)其對外部干擾的魯棒性,對機(jī)器人導(dǎo)航至關(guān)重要。本文提出了FusionPortable基準(zhǔn),這是一個(gè)完整的多傳感器數(shù)據(jù)集,具有一組不同的移動(dòng)機(jī)器人序列。本文有三個(gè)貢獻(xiàn)。我們首先推出一款便攜式多功能多傳感器套件,提供豐富的傳感器測量:10Hz激光雷達(dá)點(diǎn)云、20Hz RGB幀圖像、來自事件相機(jī)的高速率和異步事件、來自IMU的200Hz慣性讀數(shù)和10Hz GPS信號(hào)。傳感器在硬件中已經(jīng)暫時(shí)同步。這個(gè)設(shè)備是輕量級的、獨(dú)立的,并且支持移動(dòng)機(jī)器人的即插即用。其次,我們通過利用多個(gè)機(jī)器人平臺(tái)進(jìn)行數(shù)據(jù)收集,通過收集覆蓋校園內(nèi)各種環(huán)境的17個(gè)序列來構(gòu)建數(shù)據(jù)集。一些序列對現(xiàn)有的SLAM算法提出了挑戰(zhàn)。第三,我們?yōu)榻怦疃ㄎ缓徒▓D性能評估提供了基礎(chǔ)事實(shí)。我們還評估了最先進(jìn)的SLAM方法,并確定了它們的局限性。由原始傳感器測量值、地面實(shí)況、校準(zhǔn)數(shù)據(jù)和評估算法組成的數(shù)據(jù)集將被發(fā)布。
3. 算法分析
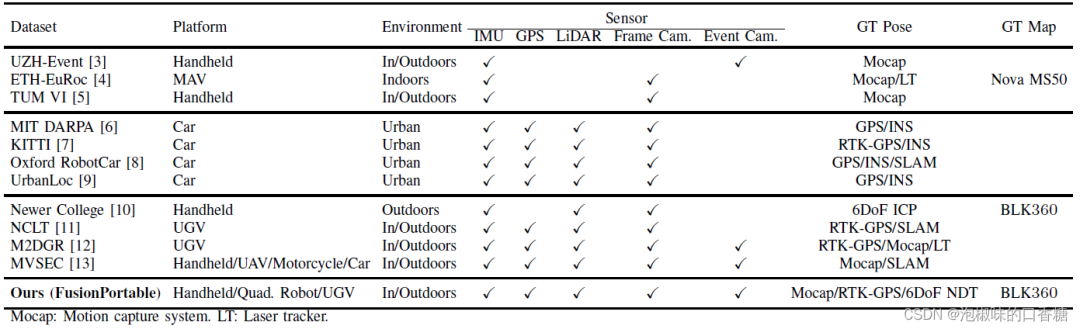
如圖1所示是作者使用的多傳感器設(shè)備,包括帶有萬向節(jié)穩(wěn)定器的手持手柄,四足機(jī)器人,以及阿波羅自主車輛,可以發(fā)現(xiàn)所應(yīng)用的平臺(tái)包含了各個(gè)場景和應(yīng)用。表1所示是該數(shù)據(jù)集與其他數(shù)據(jù)集在采集平臺(tái)、室內(nèi)外環(huán)境、傳感器設(shè)備以及軌跡/地圖采集方式的對比。可以看出,該多傳感器數(shù)據(jù)集有三個(gè)明顯優(yōu)點(diǎn):(1) 大量高精傳感器的融合;(2) 包括腿式機(jī)器人在內(nèi)的三個(gè)不同平臺(tái)上的數(shù)據(jù)收集;(3) 用于算法評估的地面實(shí)況軌跡和3D地圖。
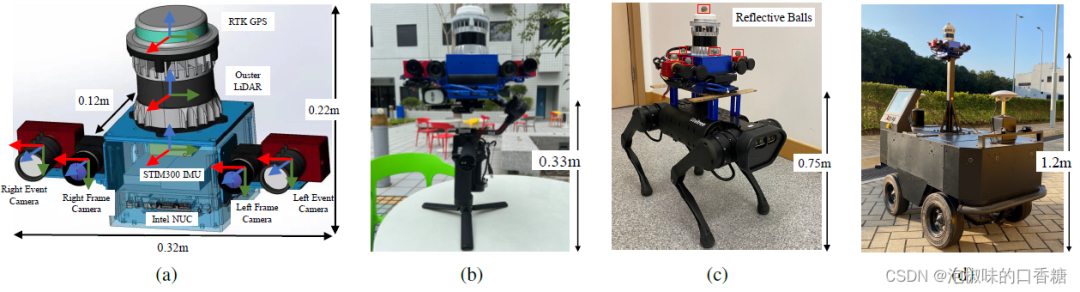
(a) 傳感器裝備的CAD模型 (b) 萬向穩(wěn)定器 (c) 四足機(jī)器人 (d) 阿波羅自動(dòng)小車
圖1 多傳感器設(shè)備和數(shù)據(jù)收集平臺(tái)
作者將其稱為FusionPortable基準(zhǔn),他們工作的主要貢獻(xiàn)如下:
(1) 制造了便攜式和多功能的多傳感器設(shè)備:左右兩側(cè)安裝兩個(gè)RGB相機(jī),內(nèi)部安裝一個(gè)高頻高精度IMU,頂部位置安裝一個(gè)RTK-GPS,并將新型事件相機(jī)和高分辨率3D激光雷達(dá)集成。為減小動(dòng)態(tài)偏差,所有傳感器都安裝在相同的剛性鋁合金部件上。完整的設(shè)備有自己的時(shí)鐘同步單元、處理器和電池,并且尺寸、重量和可擴(kuò)展性較好。
(2) 作者將傳感器安裝在各種平臺(tái)上,并在HKUST科技大學(xué)校園內(nèi)的各種結(jié)構(gòu)化或半結(jié)構(gòu)化環(huán)境進(jìn)行測試,包括實(shí)驗(yàn)室、花園、食堂、走廊、自動(dòng)扶梯和室外道路。此外,收集的序列呈現(xiàn)了由外部光線、移動(dòng)物體和場景紋理引起的幾種環(huán)境變化。這些問題對SLAM算法都是挑戰(zhàn)。
(3) 作者還提供了大多數(shù)室內(nèi)場景的真實(shí)地圖,并對幾個(gè)最先進(jìn)的SOTA SLAM系統(tǒng)進(jìn)行基準(zhǔn)測試,包括兩個(gè)基于視覺的方法和四個(gè)基于激光雷達(dá)的方法。
表1 FusionPortable與之前數(shù)據(jù)集在數(shù)據(jù)采集平臺(tái)、環(huán)境、傳感器類型和地面實(shí)況方法方面的比較
3.1 傳感器配置
如表2所示是作者所使用傳感器的特性,具體來說作者使用Intel NUC來運(yùn)行傳感器驅(qū)動(dòng)程序,附加傳感器消息的時(shí)間戳,并將消息記錄到Ubuntu系統(tǒng)上的ROS包中。該電腦使用i7處理器、1TB固態(tài)硬盤和64GB DDR4內(nèi)存。下面分別介紹具體傳感器的特性:
(1) 3D激光雷達(dá):使用OS1-128激光雷達(dá),內(nèi)部同步IMU輸出100Hz線性加速度和角速度,它還輸出深度圖像、信號(hào)圖像和周圍的環(huán)境圖像。
(2) RGB相機(jī):兩個(gè)FILR BFS-U3-31S4C全局快門彩色相機(jī)安裝在系統(tǒng)的兩側(cè),直接面向前方。它們由外部觸發(fā)器同步,并以20 fps的速度捕捉高分辨率圖像。曝光時(shí)間被設(shè)置為固定值,以最小化相對延遲,圖像的時(shí)間戳的平均差異低于1毫秒。
表2 各個(gè)傳感器及其特點(diǎn)
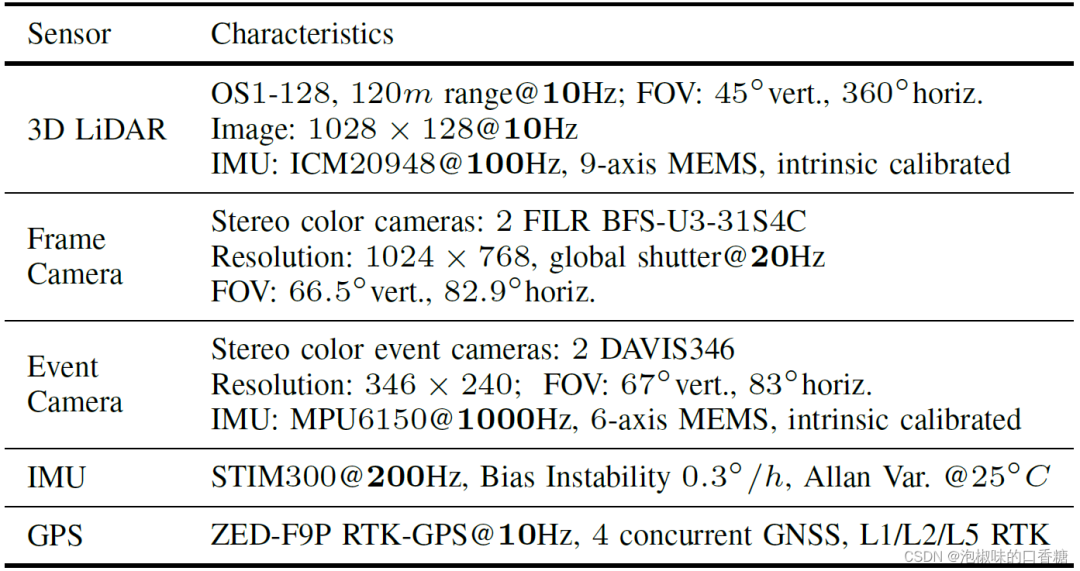
(3) 事件相機(jī):兩個(gè)事件相機(jī)具有高時(shí)間分辨率、高動(dòng)態(tài)范圍、低功耗等優(yōu)點(diǎn)。相機(jī)具有346x260分辨率和內(nèi)部高速IMU輸出。事件相機(jī)使用從左相機(jī)(主相機(jī))產(chǎn)生的觸發(fā)信號(hào)進(jìn)行同步,以便通過外部導(dǎo)線向右(從相機(jī))發(fā)送同步脈沖。為了抑制激光雷達(dá)的激光,兩個(gè)相機(jī)都配備了額外的紅外濾光片。對于室內(nèi)序列,手動(dòng)設(shè)置和固定APS曝光。對于室外序列,使用自動(dòng)曝光來避免曝光過度或曝光不足。
(4) 慣性測量單元(IMU):一個(gè)戰(zhàn)術(shù)級的STIM300慣性測量單元被嚴(yán)格安裝在激光雷達(dá)下方,作為系統(tǒng)的主要慣性傳感器。它具有高更新速率(200Hz)和低噪聲和漂移測量,其偏置不穩(wěn)定性在0.3°/h左右。
(5) 全球定位系統(tǒng)(GPS):在激光雷達(dá)頂部額外安裝了ZED-F9P RTK-GPS設(shè)備。在室外場景中,GPS被激活并提供精確的緯度、經(jīng)度和高度讀數(shù)。但是由于建筑物的遮擋,它有時(shí)會(huì)變得不穩(wěn)定。
3.2 傳感器校準(zhǔn)
作者預(yù)先仔細(xì)校準(zhǔn)單個(gè)傳感器的固有特性、外部特性以及傳感器之間的總時(shí)間延遲,并將STIM300 IMU的坐標(biāo)系定義為體坐標(biāo)系。
(1) 時(shí)鐘同步:作者使用FPGA產(chǎn)生外部信號(hào)觸發(fā)來同步所有傳感器的時(shí)鐘,這可以保證以最小的延遲跨多個(gè)傳感器收集數(shù)據(jù)。FPGA從GPS接收每秒脈沖(PPS)信號(hào),并分別向IMU、相機(jī)和激光雷達(dá)發(fā)送200、20、10Hz信號(hào)。FPGA使用其內(nèi)部時(shí)鐘,以啟用GPS缺失場景中的時(shí)間同步。
(2) 相機(jī)校準(zhǔn):RGB相機(jī)和事件相機(jī)使用Matlab校準(zhǔn)工具箱進(jìn)行估計(jì),其中使用了針孔攝像機(jī)和徑向-切向失真模型。作者將傳感器套件移動(dòng)到棋盤前,以收集一系列圖像。同時(shí)均勻地采樣圖像作為校準(zhǔn)數(shù)據(jù),并手動(dòng)移除具有高重投影誤差的異常值。
(3) 相機(jī)-IMU外部校準(zhǔn):IMU的內(nèi)部使用Allen推導(dǎo)工具箱進(jìn)行校準(zhǔn),該工具箱可估算相機(jī)和加速度計(jì)測量的噪聲密度和隨機(jī)游走。之后,通過Kalibr獲得相機(jī)相對于IMU的空間和時(shí)間參數(shù)。整體系統(tǒng)包括4個(gè)IMU:激光雷達(dá)中的STIM300、ICM20948和DAVIS346事件相機(jī)中的兩個(gè)MPU6050。因此,作者校準(zhǔn)這些IMU的固有特性,并估計(jì)這些傳感器對的固有特性:STIM300、RGB相機(jī)、STIM300、事件相機(jī)、左MPU6050、左DAVIS346和右MPU6050、右DAVIS346。
(4) 相機(jī)-激光雷達(dá)外部校準(zhǔn):作者使用棋盤進(jìn)行相機(jī)-激光雷達(dá)外部校準(zhǔn),從點(diǎn)云和圖像中提取棋盤的外角,通過最小化所有對應(yīng)角點(diǎn)的距離進(jìn)行優(yōu)化。
3.3 數(shù)據(jù)集描述
作者在進(jìn)行數(shù)據(jù)采集時(shí)主要考慮以下幾個(gè)方面,并對不同場景建立不同的序列。表3總結(jié)了每個(gè)序列的關(guān)鍵特征,圖2顯示了其中的幾個(gè)場景圖片,圖3顯示了樣本傳感器數(shù)據(jù)。
(1) 位置:環(huán)境位置分為室內(nèi)和室外,GPS信號(hào)在室外環(huán)境中有時(shí)不穩(wěn)定。
(2) 結(jié)構(gòu):結(jié)構(gòu)化環(huán)境主要可以用幾何圖元來解釋(如辦公室或建筑物),而半結(jié)構(gòu)化環(huán)境既有幾何元素又有復(fù)雜元素,如樹木和雜物。狹窄走廊等場景是結(jié)構(gòu)化的。
(3) 照明條件:相機(jī)對外部照明條件很敏感,弱光和強(qiáng)光都可能對視覺處理算法提出挑戰(zhàn)。
(4) 外觀:紋理豐富的場景有助于視覺算法提取穩(wěn)定的特征(例如點(diǎn)和線),而無紋理的場景可能會(huì)對性能產(chǎn)生負(fù)面影響。
(5) 運(yùn)動(dòng)模式:可以執(zhí)行慢速、正常和快速運(yùn)動(dòng)。關(guān)于安裝的平臺(tái),手持設(shè)備執(zhí)行任意的6-DoF和跳躍運(yùn)動(dòng),四足機(jī)器人主要執(zhí)行平面但不平穩(wěn)的運(yùn)動(dòng),而車輛可以以恒定的速度進(jìn)行平面運(yùn)動(dòng)。
(6) 對象運(yùn)動(dòng):在動(dòng)態(tài)環(huán)境中,當(dāng)數(shù)據(jù)被捕獲時(shí),幾個(gè)元素在運(yùn)動(dòng)。數(shù)據(jù)采集的時(shí)間越長,元素的變形就越大(例如行人或汽車)。相比之下,在靜態(tài)環(huán)境中移動(dòng)對象很少。
表3 每個(gè)序列的一些統(tǒng)計(jì)和特征
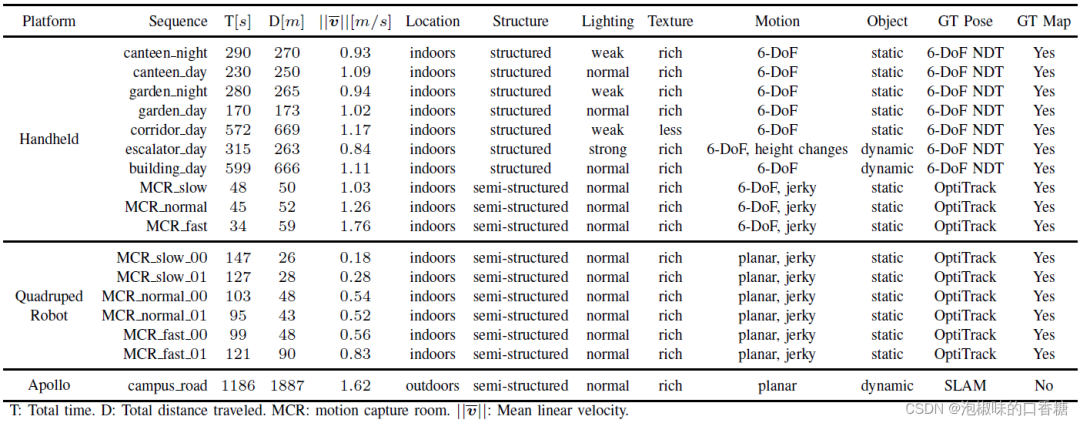
圖2 多個(gè)序列位置的場景圖像
?
圖3 傳感器測量樣本
(a)-(d):由RGB相機(jī)捕獲的圖像 (e)-(f):由積極事件(紅色)和消極事件(藍(lán)色)增強(qiáng)的圖像 (h)-(i):激光雷達(dá)的3D點(diǎn)云,網(wǎng)格大小為10m
3.4 真值
數(shù)據(jù)集中大多數(shù)序列為算法評估提供真值。在幾個(gè)室內(nèi)場景中,也提供了周圍環(huán)境的真實(shí)地圖。軌跡真值生成詳細(xì)說明如下:
(1) 真值地圖:在中小型環(huán)境中,作者使用 Leica BLK360激光掃描儀從多個(gè)位置記錄該結(jié)構(gòu)的高分辨率彩色3D稠密地圖,精確度為毫米。圖4顯示了三個(gè)例子。
(2) 真值姿態(tài):在動(dòng)作捕捉室,作者使用OptiTrack系統(tǒng)以120Hz的頻率測量反射球中心的姿態(tài),精度為毫米。OptiTrack直接與同一臺(tái)電腦連接,以記錄姿勢,最大限度地減少時(shí)間延遲。從球的中心到傳感器裝置的主體框架的外力通過手眼校準(zhǔn)方法解決。在地面實(shí)況地圖覆蓋的中等規(guī)模環(huán)境中,采用基于NDT的6-DoF定位來估計(jì)激光雷達(dá)在先前地圖中的姿態(tài),作為軌跡真值。在室外環(huán)境中,將RTK GPS信號(hào)與激光雷達(dá)慣性測量融合,以獲得基于LIO-SAM的精確軌跡。
?
圖4 運(yùn)動(dòng)捕捉房間、走廊和建筑場景顏色的真實(shí)點(diǎn)云
3.5 數(shù)據(jù)格式和后處理
整體數(shù)據(jù)在ROS環(huán)境中收集的,作者提供ROS包和單獨(dú)的數(shù)據(jù)文件:
(1) env.bag是從數(shù)據(jù)收集過程中獲得的原始rosbag,可以使用ROS工具對其進(jìn)行解析。
(2) env ref.bag是改進(jìn)的rosbag,其中傳感器數(shù)據(jù)進(jìn)行了后處理。
(3) data/存儲(chǔ)來自env.bag的單個(gè)傳感器數(shù)據(jù)。每個(gè)數(shù)據(jù)都有其時(shí)間戳,可以從timetamps.txt中檢索到。
(4) data/遵循KITTI格式。
具體來說,有三個(gè)步驟來進(jìn)行后處理:
(1) 缺失的測量值被線性插值;
(2) 通過手眼標(biāo)定結(jié)果將運(yùn)動(dòng)捕捉系統(tǒng)提供的姿態(tài)轉(zhuǎn)換到自身框架;
(3) 事件包在1000 Hz左右重新發(fā)布,用于一些基于事件的算法。
4. 實(shí)驗(yàn)
作者使用它們開發(fā)的數(shù)據(jù)集來測試SOTA SLAM系統(tǒng),評估了幾個(gè)具有不同傳感器組合和方法的開源系統(tǒng):VINS-Fusion (IMU+雙目),ESVO (事件相機(jī)),A-LOAM (激光雷達(dá)),LIO-Mapping (IMU+激光雷達(dá)),LIO-SAM (IMU+激光雷達(dá)),以及FAST-LIO2 (IMU+激光雷達(dá)),表4所示是定量的定位結(jié)果對比,圖5是一些定性對比實(shí)驗(yàn)。
表4 定位精度對比
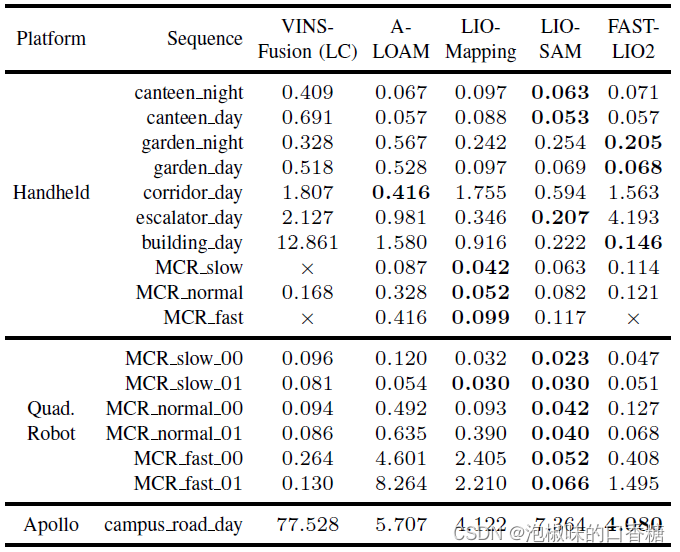
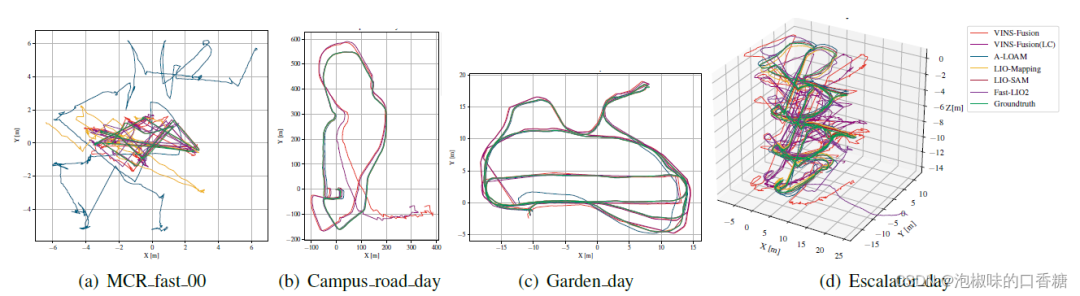
圖5 不同算法軌跡的定性對比
其中,"LC"表示使用了閉環(huán)模塊,"x"表示算法無法完成序列。ESVO因?yàn)椴荒芡瓿伤行蛄校詻]有展示結(jié)果。VINS-Fusion和Fast-LIO2因?yàn)椴荒芎芎玫猛瓿沙跏蓟谀承┣闆r下會(huì)失敗。沒有IMU的幫助,A-LOAM無法處理不平穩(wěn)和快速的運(yùn)動(dòng),因此在兩個(gè)MCR序列和四足機(jī)器人的所有序列上表現(xiàn)不佳。雖然FAST-LIO2有時(shí)在幾個(gè)序列上具有不可靠的結(jié)果。令人驚訝的是,LIO-SAM在所有基于四足機(jī)器人的序列中表現(xiàn)良好,甚至在大旋轉(zhuǎn)和快速運(yùn)動(dòng)中也是如此。因?yàn)榈图y理?xiàng)l件,走廊序列對所有的方法都是一種挑戰(zhàn)。
此外,作者還評估了A-LOAM和LIO-SAM在走廊和花園序列中的建圖質(zhì)量。如圖6所示,平均距離分別為0.938米和0.597米。尤其是走廊建圖過程中,A-LOAM的地圖在z軸上漂移較大.
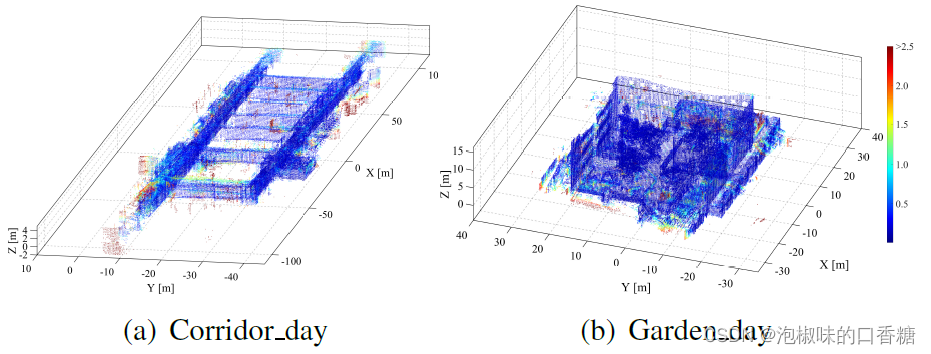
圖6 對(a) A-LOAM和(b) LIO-SAM建圖精度的評估
5. 結(jié)論
在2022 IROS論文"FusionPortable: A Multi-Sensor Campus-Scene Dataset for Evaluation of Localization and Mapping Accuracy on Diverse Platforms"中,作者介紹了FusionPortable基準(zhǔn),這是一個(gè)來自各種平臺(tái)上不同校園場景的多傳感器數(shù)據(jù)集。作者首先介紹了他們獨(dú)立的、即插即用的多傳感器裝置,這些設(shè)備大大提高了移動(dòng)機(jī)器人的感知能力。在介紹完數(shù)據(jù)集的配置、校準(zhǔn)以及各項(xiàng)參數(shù)以后,作者在其上運(yùn)行了當(dāng)前的SOTA SLAM算法。此外,作者提出,他們計(jì)劃將這個(gè)數(shù)據(jù)集擴(kuò)展到校園規(guī)模的環(huán)境之外。