Infineon公司的TLE4941/TLE4941C是一款差分雙線霍爾效應(yīng)傳感器IC。
霍爾效應(yīng)傳感器集成電路TLE4941的目的是提供有關(guān)信息轉(zhuǎn)速到現(xiàn)代車輛動態(tài)控制系統(tǒng)和ABS 。
輸出已被設(shè)計成一個兩線的電流接口。該傳感器不工作外部組件,結(jié)合了快速啟動時間和低截止頻率。
出色的精度和靈敏度指定為嚴苛的汽車要求的溫度范圍廣,高ESD和EMC的魯棒性。
BiCMOS技術(shù)用于有源傳感器的單片集成區(qū)域和信號調(diào)節(jié)電路。
優(yōu)化壓電補償和集成的動態(tài)偏移補償能夠輕松制造和消除磁偏移。
TLE4941C另外設(shè)置有包覆成型1.8nF的電容為改善EMI性能。
特點:
兩線制電流接口
動態(tài)自校準(zhǔn)原理
單芯片解決方案
無需外部元件
高靈敏度
南北極誘導(dǎo)前可能
高抗壓電效應(yīng)
大型經(jīng)營氣隙
寬工作溫度范圍
PSSO2-1
TLE 4941C :1.8nF電容包覆成型
目前受國際大環(huán)境影響,TLE4943缺貨比較嚴重,國內(nèi)廠家推出了相應(yīng)的替代產(chǎn)品,下面我們來了解一下知名半導(dǎo)體廠商意瑞半導(dǎo)體的產(chǎn)品及相關(guān)輸出協(xié)議:
1. 簡介
意瑞半導(dǎo)體的輪速傳感器芯片提供了幾種不同的輸出協(xié)議,每種輸出協(xié)議對應(yīng)的輸出信號都有一些區(qū)別,對應(yīng)不同的應(yīng)用場景以及程序需求。
根據(jù)特定情況選取一個合適的輪速傳感器輸出協(xié)議非常重要。
本文會介紹不同輸出協(xié)議的區(qū)別及優(yōu)劣勢,如表1,總結(jié)了最常用的幾種輪速傳感器的輸出協(xié)議。(*產(chǎn)品型號尾綴“C”的版本代表內(nèi)置電容。)
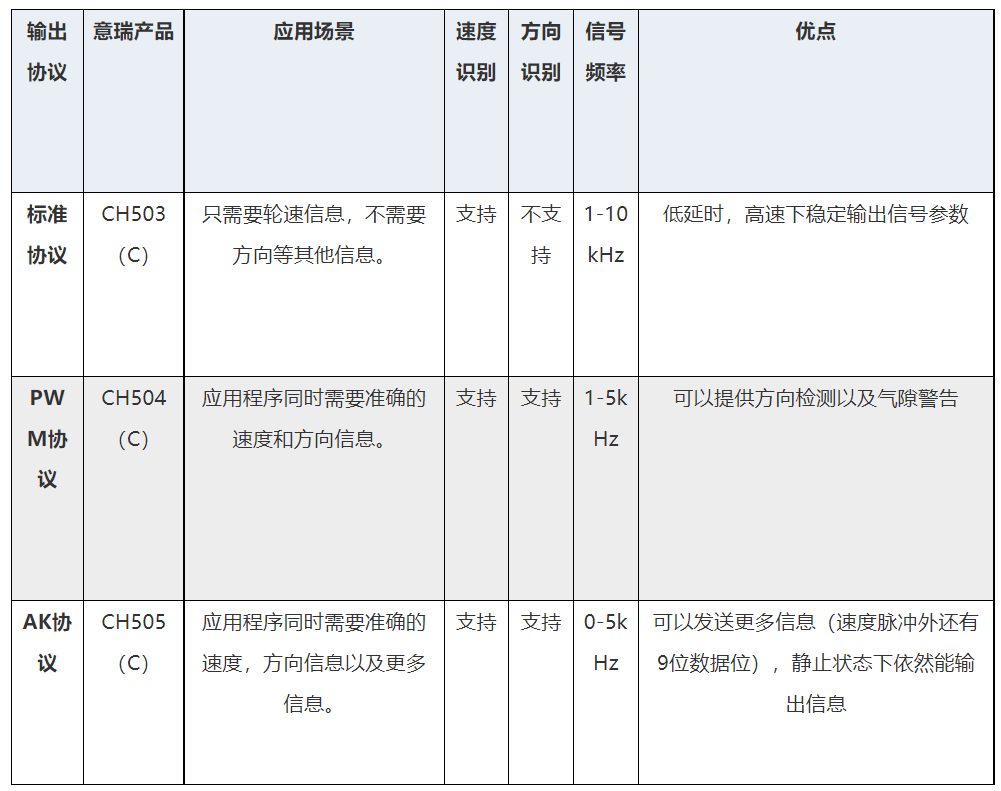
表1 輪速傳感器芯片輸出協(xié)議總結(jié)
*產(chǎn)品型號尾綴“C”的版本代表內(nèi)置電容。
2. 標(biāo)準(zhǔn)協(xié)議
輪速傳感器在測量齒輪轉(zhuǎn)速時,被測量的運動部件會經(jīng)過傳感器的前端,引起磁力線密度的變化。
標(biāo)準(zhǔn)協(xié)議是輪速傳感器中最簡單的協(xié)議,CH503(C)內(nèi)置兩個霍爾盤,將霍爾盤間的差分信號調(diào)整并且放大,當(dāng)輸入信號越過其最大值和最小值的算術(shù)平均值時發(fā)生切換(例如正弦信號的過零點),即輸出從ON變?yōu)镺FF,反之亦然。
一個有效的傳感器輸出只能處于OFF或ON兩種狀態(tài),分別用低電流和高電流表示,最終輸出方波信號,如圖1所示。
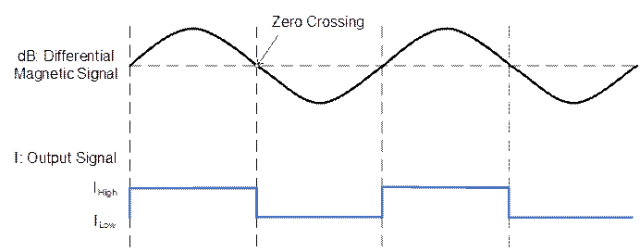
圖1標(biāo)準(zhǔn)協(xié)議輸出
對于只需要速度信息、不需要方向信息的應(yīng)用來說,標(biāo)準(zhǔn)的速度協(xié)議非常適合選用,在允許的氣隙范圍內(nèi),方波信號的輸出都是很穩(wěn)定的,CH503(C)的占空比波動小、延時較小,在高速的輪速下輸出參數(shù)依然穩(wěn)定有效。
但是這種協(xié)議的缺點就是無法輸出其他信息,例如方向以及氣隙警告等。
3. PWM協(xié)議
PWM協(xié)議的電流與標(biāo)準(zhǔn)協(xié)議類似,電路中的開和關(guān)狀態(tài)由高和低電流來表示。磁輸入信號的每一次過零都會觸發(fā)一個輸出脈沖,通常每個輪齒旋轉(zhuǎn)的周期會產(chǎn)生固定脈沖數(shù),速度信息就可以根據(jù)輸出脈沖率提供,輸出信號的連續(xù)上升沿之間的間隔時間就是脈沖率。除了速度信號以外,還會通過PWM調(diào)制的方式改變輸出脈沖的寬度,從而提供更多的信息。
關(guān)于方向的定義,如圖2所示,CH504(C)芯片帶絲印的面朝向目標(biāo)齒輪,齒輪從芯片GND引腳側(cè)往VDD側(cè)轉(zhuǎn)時,輸出脈沖傳遞的是DR-R的方向信息;而當(dāng)目標(biāo)齒輪從VDD側(cè)往GND側(cè)轉(zhuǎn)時,輸出脈沖傳遞的是DR-L的信息。兩個方向信息以不同的脈沖寬度體現(xiàn),可以幫助控制單元了解此時齒輪轉(zhuǎn)動的方向。同樣,如果氣隙超出臨界值的時候,脈沖寬度變化也會給出警告信息。具體的脈寬調(diào)制的寬度取決于傳感器芯片的編程。PWM協(xié)議的輸出波形如圖3所示。
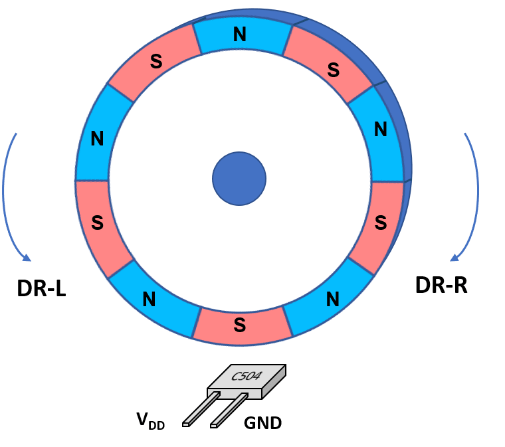 圖2方向的定義
圖2方向的定義
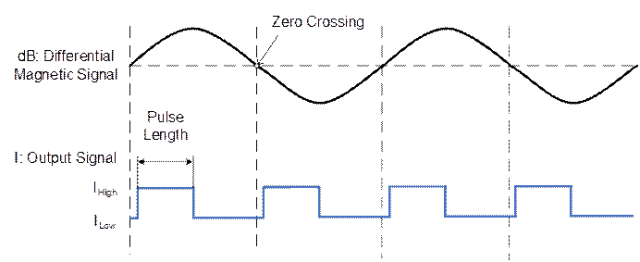 圖3PWM協(xié)議輸出
圖3PWM協(xié)議輸出
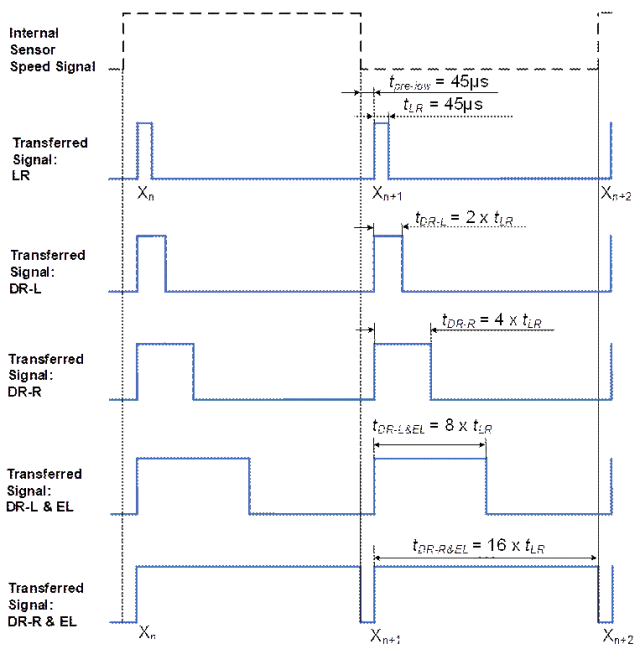
圖4 PWM協(xié)議不同脈寬傳遞的信息
相較于標(biāo)準(zhǔn)協(xié)議,PWM協(xié)議不僅僅是提供速度信息,還有方向和氣隙警告等信息。車輪的正反轉(zhuǎn)判斷信息大大提高了輪速傳感器在智能方面的應(yīng)用。
4. AK協(xié)議
AK協(xié)議包含一個IHIGH?的速度脈沖和后續(xù)的九位數(shù)據(jù)信息位,速度脈沖是提供齒輪的速度信息,后續(xù)的數(shù)據(jù)信息位提供更多的其他信息,例如方向以及氣隙信息等。
這些數(shù)據(jù)信息位是曼徹斯特編碼,一幀數(shù)據(jù)內(nèi),數(shù)據(jù)段的波形,若檢測到電流上升沿則表示數(shù)據(jù)1,電流下降沿表示數(shù)據(jù)0。
編碼1和0由IMID和ILOW組成,可以看出AK協(xié)議的速度信號由三種電流構(gòu)成。
數(shù)據(jù)信息位的0和1代表了各自不同的信息,每一位數(shù)據(jù)信息位也有各自的信息,例如方向或者是氣隙警告。
CH505(C)的輸出波形由圖3所示,AK協(xié)議數(shù)據(jù)信息如表2所示。
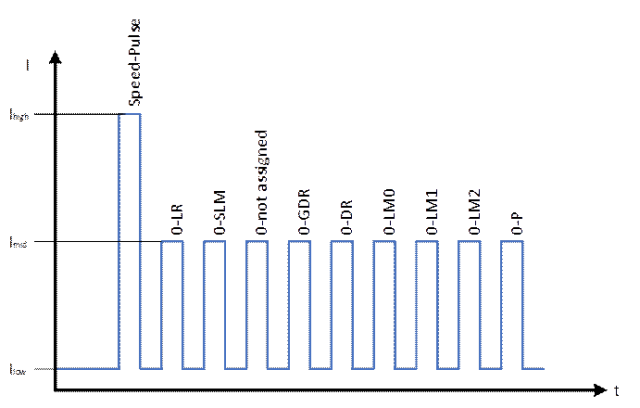
圖5 AK協(xié)議輸出波形
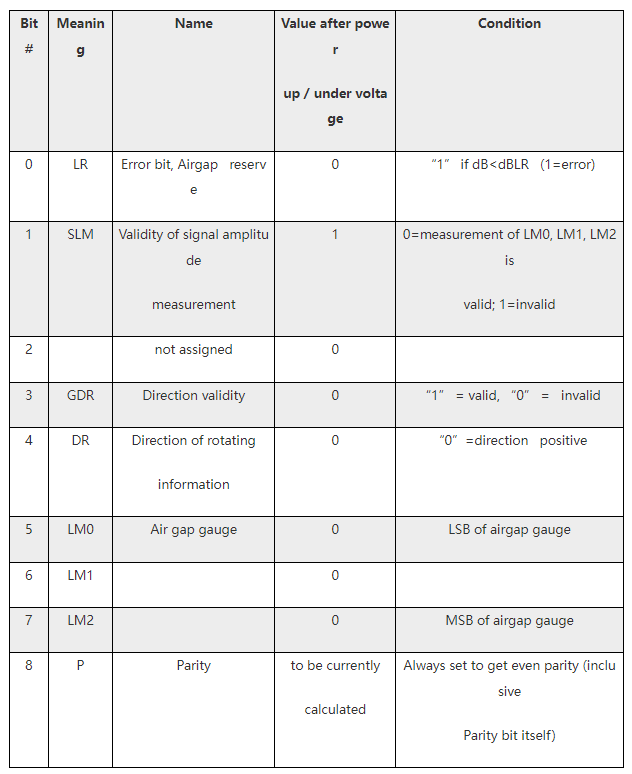
表2 CH505(C)的數(shù)據(jù)信息位含義
可以看出數(shù)據(jù)中包含了氣隙有效性、方向有效性與正反轉(zhuǎn)信息,這些單個數(shù)據(jù)可以在電控單元上被解碼,從而獲得具體狀態(tài)的信息。
即便是靜止的狀態(tài)下(Standstill mode),速度脈沖消失,但是后面的數(shù)據(jù)位依然能輸出,對于需要智能輪速傳感器的應(yīng)用十分重要。
然而AK協(xié)議中由于傳輸消息的時間會很長,高速狀態(tài)下改為只輸出其中幾位數(shù)據(jù)位,所以目標(biāo)輪轉(zhuǎn)動的最大速度可能會受到一定的限制。
5. 結(jié)論
本文就常見的幾種輪速傳感器的協(xié)議做了一些介紹,分析了它們的特點以及優(yōu)劣勢。
不難看出,在不同的應(yīng)用場景下,選擇一個更合適的輸出形式非常重要,協(xié)議的選擇是高度依賴于應(yīng)用程序的需求的。
可以根據(jù)需求從CH50X系列中挑選標(biāo)準(zhǔn)協(xié)議、PWM協(xié)議、及AK協(xié)議三種輸出形式的輪速傳感器。
審核編輯:劉清