 電子發燒友App
電子發燒友App


我們都知道,在以往的交直流伺服驅動器緩上電應用上,為了抑制上電時大電流對整流橋、功率電容的沖擊,大都采用普通的三相整流全橋+繼電器控制方式來實現緩上電,此方法的主要缺點有:
◇一般繼電器的觸點容量滿足不了大功率應用場合,觸點流過大電流時發熱嚴重,線包發熱也很嚴重,在高溫高熱環境下工作更是如此;
◇正常運行過程中,如由于某種原因導致繼電器帶大電流吸合或者斷開,則很容易引起繼電器損壞,甚至引起整個驅動回路的損壞;
◇響應時間長,在電網不穩定時仍可能造成電網對整流橋有很大的電流沖擊;
◇耐壓問題:由于觸點為流過動力回路的大電流,必然要求線包與觸點間的絕緣要求很高,而此類繼電器現很難購買到。
因此,為了解決上述的缺點,國外有些廠家推出了晶閘管(可控硅)三相整流全橋,如日本三社公司推出的DFA XXX BA xxx系列整流橋,在不改變原整流橋外形、安裝尺寸的情況下,內含一緩上電專用的可控硅,方便用戶簡化電路設計,為進一步提高產品可靠性提供了可能。現以DFA100BA160為例,介紹該類整流橋的使用方法,以達拋磚引玉的目的。
1 DFA100BA160工作原理簡介
1.1 DFA100BA160的等效電路如圖1所示,主要特點有:
(1)可連續耐受1600VDC的電壓,能瞬時耐受1700VDC的電壓;
(2)可連續輸出100ADC的電流,能瞬時輸出>1000ADC的電流;
(3)內置的可控硅可耐受電流沖擊能力>7000A2S,電流變化率di/dt>150A/μs;且由于該可控硅也和橋內的二極管一樣內置于該整流橋的散熱基板上,而整流橋一般是安裝在驅動器散熱器上,所以其額定工作電流是有保障的。
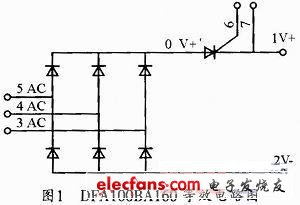
? ? ? ? 從圖1可以看出,若圖中的可控硅未開通,即使3、4、5腳加入功率電,電流不能通過該可控硅流通,只能通過別的旁路(如緩上電電阻)流通。利用該可控硅,可實現緩上電的自動控制功能。
從圖1也可以看出,DFA100BA160可分為輸入部分(3、4、5腳)和輸出(1、2)二部分,控制部分(6、7腳)。
1.2 DFA100BA160引腳功能見表1

2 DFA100BA160在伺服系統上的應用
2.1 一種用DFA100BA160作緩上電自動控制的典型伺服系統的功率電路(見圖2)
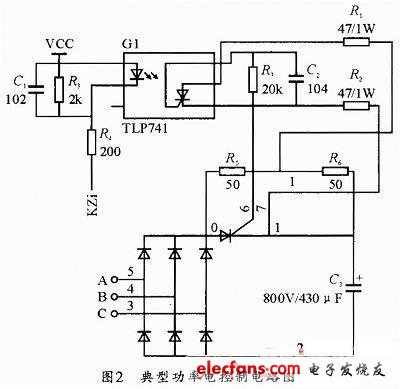
圖中A、B、C為3φ380VAC的輸入端,KZi為整流橋內置可控硅的控制輸入端,R5、R6為功率回路的緩上電電阻,同時R6也是TLP741光耦的電源采樣電阻。
2.2 電路工作原理
由圖2可見, 當A、B、C端口剛送入3φ380VAC時,則:
(1)KZi送入的電平為高,TLP741原邊不通,則付邊不通,整流橋內置的可控硅不會導通,功率回路的充電電流只能通過三相全橋、R5、R6往功率電容C3充電,此前,上位機應禁止負載從功率電容C3上用電;
(2)當上位機檢測到C3電容兩端的電壓變化率小于規定值時,則KZi送入的電平為低,允許TLP741原邊導通,則付邊在滿足開通的條件下,隨時準備好觸發整流橋內置的可控硅導通。此時,如果采樣電阻R6上的電壓降可能很小,不足以讓TLP741內的可控硅導通,或R6上的電壓降足夠讓TLP741內的可控硅導通,但并不足以讓整流橋內置的可控硅導通,則在此段時間內,整流橋內置的可控硅可能是不導通的;
(3)在送出的KZi信號為低,延時約10ms后(目的:充分保障觸發電路準備好),允許功率回路C3帶負載。此時,如果C3電容兩端電壓比整流出的電壓(即圖2中的0端對2腳端的電壓)高,則整流橋內置的可控硅仍不導通,只有在下一個充電周期:當0端的電壓比1端的電壓高、且采樣電阻R6上的電壓降足以讓整流橋內置的可控硅導通時,可控硅才會導通。由圖2功率回路帶電機負載(負載功率約為5KW)后測得的可控硅控制極(6、7端)實際波形如圖3、圖4所示。
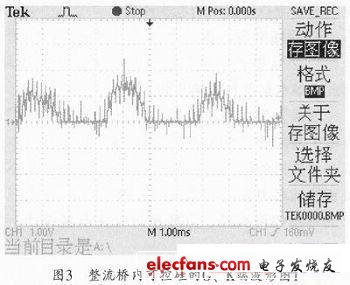
由圖3可見,在觸發脈沖的高電平期間,為可控硅關斷時間,為主要由功率電容C3向負載提供功率期,約占整個脈沖周期的1/3;在觸發脈沖的低電平時間,為可控硅完全導通時間,為整流回路往功率電容充電并向負載提供功率期,約占整個脈沖周期的2/3。
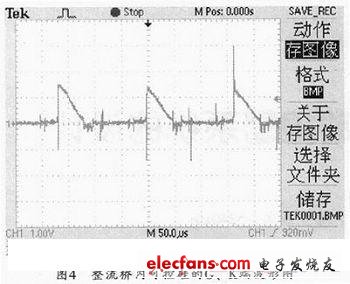
圖4為圖3波形的部分展開圖,或者可以說是瞬時往功率回路充電需要提供的額外電流值:正常值為往電容C3的充電電流(對應圖3中的類正弦波部分),額外值為往負載提供做功的電流(對應圖3中的疊加在類正弦波上的紋波部分)。圖4中的時間段對應于可控硅的關斷轉向導通、充電/負載電流均流經電阻R5、R6的過渡期間。由于功率回路的PWM控制周期為6kHz,PWM開通時,電流流經R6,于是有觸發脈沖加到可控硅的C、K極,PWM關斷時,無電流流經R6,于是無觸發脈沖加到可控硅的G、K極,所以此時間段內可控硅的觸發脈沖頻率也是6kHz。
(4)當發現有故障或掉電需要關斷可控硅時,上位機在完全斷開功率回路的負載后,再使送出的KZi信號為高,則最多延時一個電周期(=1/(6*50) s≈3.33ms)后,可控硅必然關斷。
(5)重復1~4,即可實現一個完整的控制過程。
3 注意事項
在圖2方案電路中,要關注:
(1)電阻功率問題:在圖2中,由上分析,可見電阻R5、R6在初次緩上電時瞬時流過的電流非常大,正常帶載工作過程,瞬時流過的電流也比較大,所以,在實際應用時,必須注意選取電阻R5、R6的功率足夠大;同時,在可控硅開通瞬間,流過電阻R1、R2的瞬間電流也較大,如圖5所示,即為圖2功率回路帶電機負載(負載功率約為5kW)所測得的波形圖:
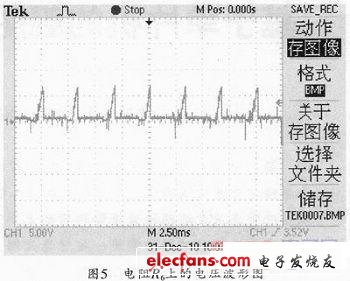
由圖可見,R6的電壓降達7V,在每個供電周期(=50Hz*6=300Hz)均流過電流。由于R2的電壓降被可控硅G、K極嵌位在2V以內,則在電阻R1上的壓降:
≥7-2=5(V)
電阻R1上的瞬時功率:≥5*5/47≈0.53(W)
可見,電阻R1需承受的功率較大,所以也要注意選取電阻R1、R2的功率足夠大,以充分保障整個觸發控制電路的可靠性;
(2)時序問題:在上電時,如果在橋內的可控硅未滿足導通條件,就允許功率回路帶上負載,則電阻R5、R6很容易就燒斷損壞,所以上電時,一定要保證在充分滿足橋內的可控硅所需的開通條件后,再允許功率回路帶上負載工作;同樣,掉電時,也要充分保證在完全斷開負載后,再使可控硅關斷。否則,不但很容易會造成緩上電電阻R5、R6甚至R1、R2損壞,也使可控硅可能工作在大電流情況下關斷,極易產生很高的關斷過壓,進而損橋內的可控硅,更是對橋內的可控硅的安全工作造成威脅;
(3)電流變化率問題:在任何情況下,必須保證可控硅導通期任何時候的電流變化率都不能超過其標稱的重復值;
(4)通態平均電流額定值:在實際使用中,由于不能充分保證整流橋的散熱,則元件應降額使用。具體降額多少,需根據實際使用狀況來決定。
(5)驅動光耦問題:由于涉及到強電、弱電隔離,可控硅導通時需要的推動功率較大,光耦付邊耐壓問題等,必須慎重的選擇內置可控硅的推動光耦。
4 方案優點分析
由圖2可見,由于很巧妙的利用緩上電電阻R6上的電壓降作為光耦TLP741的供電電源,在需要橋內的可控硅開通時,才送出允許可控硅開通的開通信號;需要橋內的可控硅關斷時,才送出允許可控硅關斷的關斷信號。所以,在功率回路正常帶載工作時,KZi的電平是一直保持為低的,可控硅的關斷、導通過程完全是自適應的,無需專門的控制策略。這不但省去了一組專門的供電電源,也無傳統的可控硅觸發控制電路需求的由供電電源的檢出的同步脈沖(以確定觸發的時刻)、門極觸發所需求的隔離脈沖變壓器等,大大的簡化了觸發控制電路,使整個觸發控制電路的工作更為可靠。
5 結束語
從上述的實驗結果來看,使用的內含一緩上電專用的可控硅三相整流全橋,可以完全替代傳統的采用繼電器作緩上電控制策略的緩上電方式,方便用戶簡化電路設計,節省安裝空間,為進一步提高產品可靠性提供了可能。雖然如此,但也存在著如前面所述的許多需要注意的地方,并且在實際應用中一定要特別注意上下電的時序配合問題,否則,在應用過程仍然會容易發生元器件損壞的故障。
實驗證明,只要解決好上述的問題,用該整流橋取代傳統的用整流橋+繼電器組合作緩上電控制策略的優越性還是很明顯的,該類整流橋目前在我公司的交直流伺服產品上都已經得到了很好的應用。








 工商網監
工商網監
評論