深迪半導(dǎo)體(上海)有限公司(Senodia Technologies)正式發(fā)布其首款三軸微機(jī)電(MEMS)陀螺儀產(chǎn)品,ST200G。
2012-06-08 08:39:52 1607
1607 陀螺儀平臺(tái)的首款產(chǎn)品原型,而MEMS陀螺儀平臺(tái)是對(duì)最近發(fā)布的AXO300閉環(huán)數(shù)字式加速度計(jì)平臺(tái)的有益補(bǔ)充。 在動(dòng)態(tài)應(yīng)用中實(shí)現(xiàn)精
2023-03-31 10:00:20655 
,隨著MEMS陀螺儀的興起,在車輛導(dǎo)航、機(jī)械控制等領(lǐng)域,精確導(dǎo)航的競爭一直在對(duì)峙。 ? 導(dǎo)航核心——陀螺慣性測量單元 ? 在高精度的捷聯(lián)慣導(dǎo)系統(tǒng)中,陀螺慣性測量單元是絕對(duì)的核心。很長一段時(shí)間以來,激光陀螺儀都是中高精度慣導(dǎo)系統(tǒng)
2023-10-24 01:11:001284 (θXω, θYω, θZω) 和各陀螺儀的積分(θXG, θYG, θZG)。實(shí)例2一種地面無人駕駛車輛(UV) 利用MEMS IMU作為平臺(tái)穩(wěn)定控制(PSC) 系統(tǒng)中的反饋傳感器以支持其天線。此
2018-10-17 10:39:42
(θXω, θYω, θZω) 和各陀螺儀的積分(θXG, θYG, θZG)。實(shí)例2一種地面無人駕駛車輛(UV) 利用MEMS IMU作為平臺(tái)穩(wěn)定控制(PSC) 系統(tǒng)中的反饋傳感器以支持其天線。此
2019-10-16 08:00:00
MEMS 加速計(jì),陀螺儀,傾角計(jì) 評(píng)估板 -?傳感器
2024-03-14 22:53:15
Mark Looney應(yīng)用工程師ADI公司摘要當(dāng)MEMS慣性測量單元(IMU)用作運(yùn)動(dòng)控制系統(tǒng)中的反饋傳感器時(shí),必須了解陀螺儀的噪聲情況,因?yàn)樗鼤?huì)在所監(jiān)視的平臺(tái)上造成不必要的物理運(yùn)動(dòng)。根據(jù)具體情況
2018-10-22 16:44:26
Mark Looney應(yīng)用工程師ADI公司摘要當(dāng)MEMS慣性測量單元(IMU)用作運(yùn)動(dòng)控制系統(tǒng)中的反饋傳感器時(shí),必須了解陀螺儀的噪聲情況,因?yàn)樗鼤?huì)在所監(jiān)視的平臺(tái)上造成不必要的物理運(yùn)動(dòng)。根據(jù)具體情況
2018-11-01 11:15:18
MEMS陀螺儀介紹
2019-08-28 13:00:59
MEMS陀螺儀介紹
2020-05-14 09:31:29
本帖最后由 eehome 于 2013-1-5 09:52 編輯
MEMS陀螺儀的原理與應(yīng)用優(yōu)勢分析
2012-08-14 22:49:36
MEMS陀螺儀的簡單校準(zhǔn)
2016-08-17 11:53:03
、常規(guī)車輛導(dǎo)航成為MEMS和FOG對(duì)峙的戰(zhàn)場。為了確定用于導(dǎo)航應(yīng)用的這兩種技術(shù)之間的相似點(diǎn),我們將對(duì)選定的高端MEMS陀螺儀與低端FOG陀螺儀進(jìn)行比較。我們?cè)诜治鲋惺褂昧藢?dǎo)航軟件和測試案例作為控制,以
2018-10-18 10:55:34
用那種型號(hào)的單片機(jī)和mems陀螺儀配合使用?謝謝大神指導(dǎo)我這位小學(xué)生
2017-03-21 20:05:49
MEMS陀螺儀也稱電子式陀螺儀,就是一塊芯片。 Iphone 4上的陀螺儀就是這種,主要作用是在GPS沒有信號(hào)時(shí),通過陀螺儀的作用仍然能夠繼續(xù)精確導(dǎo)航。MEMS陀螺儀即硅微機(jī)電陀螺儀,絕大多數(shù)
2018-10-23 10:57:15
過程如圖8所示,幅值最終穩(wěn)定在1V左右,與設(shè)定值相符圖8幅度閉環(huán)控制曲線4、結(jié)論本文提出了一個(gè)用于MEMS陀螺的PCIe實(shí)時(shí)測控平臺(tái)。通過硬件和軟件優(yōu)化,減少數(shù)據(jù)傳輸延時(shí),并且利用高效的數(shù)據(jù)傳輸時(shí)序
2018-11-08 16:22:22
MotionFX 是 X-CUBE-MEMS1 軟件的中間件庫組件,可在 STM32 上運(yùn)行。它可提供實(shí)時(shí)運(yùn)動(dòng)傳感器數(shù)據(jù)融合。它還執(zhí)行陀螺儀偏差和磁力計(jì)硬鐵校準(zhǔn)。該算法以靜態(tài)庫格式提供,旨在用于基于 ARM? Cortex?-M4 架構(gòu)的 STM32 微控制器。
2023-09-05 08:01:42
創(chuàng)新和形成規(guī)模。 而被稱之為體聲波(BAW)的新一代創(chuàng)新MEMS技術(shù)正為這些問題提供了解決方案。體聲波技術(shù)正被用于開發(fā)一類全新的固態(tài)MEMS陀螺儀,其不僅能很好滿足低功率、小尺寸、低成本及高產(chǎn)量等要求
2018-11-12 15:35:11
,MEMS器件已經(jīng)滲透于我們的生活之中。轉(zhuǎn)屏是智能手機(jī)中的一項(xiàng)基本功能,如圖.3所示,這項(xiàng)功能是通過MEMS陀螺儀來實(shí)現(xiàn)的。圖.4展示了傳統(tǒng)機(jī)械陀螺儀與MEMS陀螺儀的對(duì)比,后者比前者小得多,因而得以在
2020-05-12 17:27:14
具有良好RND水平的MEMS陀螺儀上面。現(xiàn)代控制系統(tǒng)經(jīng)常使用數(shù)字濾波器,因此在預(yù)測控制環(huán)路關(guān)鍵頻率點(diǎn)的相位延時(shí)時(shí)可能用不同的模型。舉例來說,公式10用于預(yù)測與16抽頭FIR濾波器(NTAP)相關(guān)的相位
2017-08-12 15:38:23
引起車輛方向突然變化。若不能實(shí)時(shí)控制指向角度,當(dāng)發(fā)生此類慣性運(yùn)動(dòng)時(shí),這些高指向性天線可能無法支持連續(xù)通信。圖1. 運(yùn)動(dòng)控制系統(tǒng)架構(gòu)示例。反饋環(huán)路圖1. 運(yùn)動(dòng)控制系統(tǒng)架構(gòu)示例。從MEMS陀螺儀開始,其在
2018-10-18 11:22:22
基于MEMS的加速度計(jì)設(shè)備是如何工作的?基于MEMS的陀螺儀設(shè)備是如何工作的?
2021-11-12 06:59:40
請(qǐng)問如何構(gòu)建一個(gè)用于ESP系統(tǒng)試驗(yàn)測試的測控系統(tǒng)平臺(tái)?
2021-04-15 06:08:30
MEMS陀螺儀信號(hào)中的常見噪聲源評(píng)估MEMS陀螺儀信號(hào)中常見噪聲源的簡單流程
2021-03-08 06:17:12
什么影響了運(yùn)動(dòng)控制系統(tǒng)的關(guān)鍵性能標(biāo)準(zhǔn)?采用MEMS陀螺儀的低噪聲反饋控制設(shè)計(jì)
2021-03-11 07:01:52
擺式羅盤。21世紀(jì)發(fā)展為利用自動(dòng)控制系統(tǒng)代替重力擺的電控陀螺羅盤,并創(chuàng)造出能同時(shí)指示水平面和子午面的平臺(tái)羅盤。 速率陀螺儀。用以直接測定運(yùn)載器角速率的二自由度陀螺裝置。把均衡陀螺儀的外環(huán)固定在運(yùn)載器上
2020-09-06 07:49:27
協(xié)議完成數(shù)據(jù)傳輸。可廣泛應(yīng)用于智能駕駛和平臺(tái)穩(wěn)定控制等領(lǐng)域。
二 、產(chǎn)品特性
內(nèi)置高精度車規(guī)級(jí)MEMS陀螺儀與MEMS加速度計(jì)
供電電壓:3.3±0.3 V;整機(jī)電流:≤100mA;
內(nèi)置多種誤差補(bǔ)償
2024-01-18 13:46:16
各種穩(wěn)定平臺(tái),例如車載、機(jī)載穩(wěn)定平臺(tái),陀螺的選型、參數(shù)或指標(biāo)有什么選用依據(jù)嗎?請(qǐng)教各位
2022-08-03 08:35:07
MEMS陀螺儀是如何工作的?
2021-03-18 06:48:50
型號(hào)為ADXRS624 的MEMS 陀螺儀其量程能否改為10°/s.
2018-08-10 06:53:41
)基本都不支持網(wǎng)絡(luò),也不能簡單升級(jí)具有網(wǎng)絡(luò)功能,且模式較為單一。因而,設(shè)計(jì)與實(shí)現(xiàn)了一種網(wǎng)絡(luò)化通用測控系統(tǒng)平臺(tái),以實(shí)現(xiàn)網(wǎng)絡(luò)化測控需求且具有一般平臺(tái)的通用性能。本文主要介紹了ARM嵌入式系統(tǒng)與ZigBee無線技術(shù)相結(jié)合的通用網(wǎng)絡(luò)測控平臺(tái)的硬件設(shè)計(jì)。
2020-04-10 07:44:27
本文設(shè)計(jì)了基于ARM 核的32 位微處理芯片S3C44B0X 的陀螺儀測控系統(tǒng),采用μ Clinux操作系統(tǒng),完成了對(duì)陀螺儀各項(xiàng)參數(shù)的測量、傳輸、顯示、修改和故障報(bào)警等功能,實(shí)現(xiàn)了對(duì)陀螺儀
2009-05-25 16:14:35 30
30 MEMS單軸陀螺儀芯片利用作用在旋轉(zhuǎn)物體上的科里奧利力。高Q值和相對(duì)靈敏度的壓電單晶通過采用,雖然體積小,但在振動(dòng)型中實(shí)現(xiàn)了最高的輸入/輸出靈敏度比。
2022-11-21 13:24:32
本文詳細(xì)介紹了一種基于AT91M40800 ARM7 處理器和 W3100A 芯片的實(shí)時(shí)測控系統(tǒng)開發(fā)平臺(tái)的設(shè)計(jì)與實(shí)現(xiàn),在概述了實(shí)時(shí)測控系統(tǒng)開發(fā)的現(xiàn)狀之后,提出了一種TCP/IP 實(shí)時(shí)測控系統(tǒng)開發(fā)平臺(tái)的
2009-08-19 09:26:4113 本文設(shè)計(jì)了基于ARM核的32位微處理芯片S3C44B0X的陀螺儀測控系統(tǒng),采用 Clinux操作系統(tǒng),完成了對(duì)陀螺儀各項(xiàng)參數(shù)的測量、傳輸、顯示、修改和故障報(bào)警等功能,實(shí)現(xiàn)了對(duì)陀螺儀的監(jiān)測
2010-07-20 15:44:4237 ST mems陀螺儀
基于ST專有的MEMS技術(shù)的優(yōu)勢和世界
2008-09-23 10:41:202137 中國自己的MEMS陀螺儀誕生
深迪半導(dǎo)體,日前發(fā)布了旗下第一款陀螺儀產(chǎn)品-- SSZ030CG,這標(biāo)志著第一款具有中國自主知識(shí)產(chǎn)權(quán)的商用 MEMS (微機(jī)電)陀螺儀誕生。
2009-12-07 09:05:401337 SensorDynamics推出MEMS陀螺儀系列
SensorDynamics 推出了四款采用微型QFN40封裝的新型微電子機(jī)械系統(tǒng) (MEMS) 陀螺儀:型號(hào)從SD705至SD708。這些傳感器具有較低的撞擊和振動(dòng)交叉
2010-02-23 09:21:37739 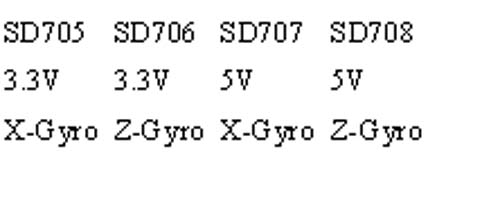
iPhone 4是全球第一款支持MEMS陀螺儀的智能手機(jī)。
目前MEMS加速計(jì)已被普遍采用其它智能手機(jī)廠商廣泛使用,但是,蘋果公司率先在其MEMS加速計(jì)中增加了一個(gè)3軸MEMS陀螺儀,這將
2010-06-17 09:57:33788 陀螺儀能夠測量沿一個(gè)軸或幾個(gè)軸運(yùn)動(dòng)的角速度,而MEMS加速計(jì)則能測量線性加速度,因此這兩者是一對(duì)理想的互補(bǔ)技術(shù)。事實(shí)上,如果組合使用加速計(jì)和陀螺儀這兩種傳感器
2010-12-16 09:03:131080 為解決氣浮、液浮陀螺平臺(tái)系統(tǒng)通電使用壽命和參數(shù)穩(wěn)定期短等突出問題,提出了利用使用壽命更長、參數(shù)穩(wěn)定性更高的光纖陀螺取代氣、液浮陀螺來構(gòu)建平臺(tái)穩(wěn)定系統(tǒng)。利用基于閉環(huán)增
2011-09-13 15:05:1634 近日,ADI推出兩款MEMS陀螺儀新品。一款是戰(zhàn)術(shù)級(jí)iSensor?數(shù)字MEMS陀螺儀ADIS16136,性能可匹敵光纖陀螺儀。
2012-01-11 11:26:222391 深迪半導(dǎo)體(上海)有限公司正式發(fā)布其首款三軸微機(jī)電(MEMS)陀螺儀產(chǎn)品,ST200G
2012-06-06 18:07:441447 分析了陀螺聲音對(duì)平臺(tái)性能的影響,提出間隙變化是導(dǎo)致陀螺聲音變大的重要因素,進(jìn)而通過提高零件的裝配一致性,從而避開由于陀螺故障導(dǎo)致平臺(tái)的失效。最后通過建立陀螺聲音測
2012-11-16 14:12:250 MEMS陀螺正交誤差分析理論及分析,適用于初學(xué)者學(xué)習(xí)
2015-12-08 09:53:111 計(jì)算機(jī)上的上位機(jī)制作工具語言之MEMS陀螺儀噪聲源的預(yù)測和管理
2016-09-01 14:55:490 MEMS微陀螺研究與發(fā)展述評(píng),有需要的下來看看。
2016-12-17 16:37:587 基于DSP的MEMS陀螺去噪算法研究,下來看看。
2016-12-17 16:33:397 基于MEMS陀螺和加計(jì)的微慣性測量單元研制
2016-12-17 16:33:3912 基于磁強(qiáng)計(jì)和MEMS陀螺的彈箭全姿態(tài)探測
2016-12-17 16:33:3910 基于隨機(jī)平均法的MEMS陀螺自適應(yīng)控制設(shè)計(jì)
2016-12-17 16:33:399 MEMS陀螺儀CRM100的信號(hào)調(diào)理電路設(shè)計(jì)_胡陳君
2017-01-18 20:23:5812 基于LabVIEW平臺(tái)的多任務(wù)實(shí)時(shí)測控系統(tǒng)的實(shí)現(xiàn)_劉為玉
2017-03-18 09:26:329 應(yīng)用積體電路(ASIC)或微控制器。本文簡要介紹MEMS加速度計(jì)感測器和陀螺儀,并探討其工作塬理、感測機(jī)制以及目前市場上多樣化的應(yīng)用,以及對(duì)我們?nèi)粘I钌钸h(yuǎn)的影響。 MEMS慣性感測器 MEMS感測器在許多應(yīng)用裝置中沿一個(gè)或多個(gè)軸向測量線
2017-10-21 09:17:012 MEMS(微機(jī)電系統(tǒng))技術(shù)的發(fā)展,MEMS陀螺儀的研究與發(fā)展受到了廣泛的重視。MEMS陀螺儀具有體積少、重量輕、可靠性好、易于系統(tǒng)集成等優(yōu)點(diǎn),應(yīng)用范圍廣闊。但是目前MEMS陀螺儀的精度還不是很高,要想大范圍應(yīng)用必須對(duì)MEMS陀螺儀的信號(hào)
2017-10-24 10:07:544 是很高,要想大范圍應(yīng)用必須對(duì)MEMS陀螺儀的信號(hào)進(jìn)行處理。 本文選用TI公司的TMS320VC33作為MEMS陀螺儀信號(hào)處理平臺(tái)的核心芯片,同時(shí)引入DSP/BIOS實(shí)時(shí)操作系統(tǒng)提供的多任務(wù)處理機(jī)制,在對(duì)陀螺儀信號(hào)進(jìn)行數(shù)據(jù)采集的間隙同時(shí)對(duì)先采集來的信號(hào)數(shù)據(jù)進(jìn)行處理
2017-10-26 15:27:059 微慣性器件是MEMS發(fā)展的重點(diǎn),如硅微加速度計(jì)、硅微陀螺儀和硅微慣性測量組合等,硅微慣性器件相較于傳統(tǒng)陀螺,具有輕便易于安裝、使用壽命長、可靠性高、耐沖擊、易于批量生產(chǎn)等特點(diǎn),在汽車、無人機(jī)
2017-11-05 11:25:145 三軸陀螺儀也叫“微機(jī)械陀螺儀”,而“微機(jī)械陀螺儀”也可稱作“MEMS陀螺儀”,即同時(shí)測定6個(gè)方向的位置,移動(dòng)軌跡,加速。
2017-12-01 16:17:2314565 
作為MEMS慣性傳感器的一種,MEMS陀螺儀具有體積小、質(zhì)量輕、啟動(dòng)快、可靠性高、價(jià)格低、易于大批量生產(chǎn)、能承受惡劣環(huán)境條件等突出優(yōu)勢,可廣泛應(yīng)用于防空導(dǎo)彈、反坦克導(dǎo)彈、便攜式導(dǎo)彈、航空制導(dǎo)炸彈等制導(dǎo)武器。那么,戰(zhàn)術(shù)導(dǎo)彈對(duì)MEMS陀螺儀究竟有哪些應(yīng)用需求呢?
2018-07-17 08:27:005589 
MEMS陀螺儀對(duì)微機(jī)械加工工藝具有高度的敏感性,加工工藝偏差、加工應(yīng)力以及可靠性等對(duì)MEMS陀螺儀的成品率至關(guān)重要。整個(gè)微機(jī)械加工工藝流程是實(shí)現(xiàn)MEMS陀螺儀長期穩(wěn)定工作的基礎(chǔ),因此必須加強(qiáng)微機(jī)械加工工藝過程的控制。
2018-07-17 08:28:001471 MEMS陀螺儀對(duì)微機(jī)械加工工藝具有高度的敏感性,加工工藝偏差、加工應(yīng)力以及可靠性等對(duì)MEMS陀螺儀的成品率至關(guān)重要。整個(gè)微機(jī)械加工工藝流程是實(shí)現(xiàn)MEMS陀螺儀長期穩(wěn)定工作的基礎(chǔ),因此必須加強(qiáng)微機(jī)械加工工藝過程的控制。
2018-06-13 15:14:001608 MEMS陀螺儀信號(hào)的處理平臺(tái)的硬件系統(tǒng)應(yīng)該包括以下幾個(gè)部分:DSP模塊,數(shù)據(jù)采集模塊,上位機(jī)通信模塊和JTAG調(diào)試接口模塊。數(shù)據(jù)采集模塊由兩部分組成:6路16位模/數(shù)轉(zhuǎn)換器ADS8364和同步時(shí)序
2018-04-12 12:10:002001 
儀的種類眾多,MEMS陀螺是近年出現(xiàn)并得到了廣泛應(yīng)用的新型陀螺。所謂MEMS,它是微電子機(jī)械系統(tǒng)( Micro Electro Mechanical System,MEMS)的簡稱,是指采用微機(jī)械加工技術(shù)可以批量制作的、集微型傳感器、微型機(jī)構(gòu)、微型執(zhí)行器以及信號(hào)處理
2018-02-24 09:54:132 光纖陀螺儀(FOG)以前曾經(jīng)是環(huán)形激光陀螺儀(RLG)等其他技術(shù)的低成本替代品,現(xiàn)在該技術(shù)面臨著新的競爭。微機(jī)電系統(tǒng)(MEMS)陀螺儀開始搶奪傳統(tǒng)FOG應(yīng)用的市場份額。具體來說,天線陣列穩(wěn)定、農(nóng)業(yè)機(jī)械控制、常規(guī)車輛導(dǎo)航成為MEMS和FOG對(duì)峙的戰(zhàn)場。
2018-02-24 17:24:278462 
單軸硅微MEMS角速率陀螺PA-ARG系列 1. 單軸硅微MEMS角速率陀螺PA-ARG 簡介 : PA-ARG系列角速率傳感器(陀螺),由西安精準(zhǔn)測控自行研制,是用來測量角速率的無旋轉(zhuǎn)馬達(dá)的固態(tài)
2018-04-03 10:33:583305 
本視頻是ADI公司MEMS陀螺儀和同類陀螺儀產(chǎn)品的對(duì)比演示,比較兩者對(duì)錯(cuò)誤輸出激勵(lì)的響應(yīng)。可以看出,我們的結(jié)果新款陀螺儀具有高抗振動(dòng)、抗沖擊性和抗線性加速度特性。
2018-06-03 01:47:003404 MEMS陀螺儀也稱電子式陀螺儀,就是一塊芯片。 Iphone 4上的陀螺儀就是這種,主要作用是在GPS沒有信號(hào)時(shí),通過陀螺儀的作用仍然能夠繼續(xù)精確導(dǎo)航。
2018-07-30 11:21:3512905 本文分析了適用于測控領(lǐng)域的4種實(shí)時(shí)操作系統(tǒng),并對(duì)比了它們實(shí)時(shí)性能的重要指標(biāo),歸納了實(shí)時(shí)性設(shè)計(jì)和實(shí)現(xiàn)中的若干問題。
2018-10-05 08:50:003316 MEMS 陀螺儀的基本工作原理是通過科里奧利力來實(shí)現(xiàn)的,演示文稿中利用生動(dòng)的動(dòng)畫講述了這一原理,并介紹了為什么工業(yè)級(jí)的陀螺儀要采用差分甚至是四核的設(shè)計(jì)結(jié)構(gòu)。當(dāng)然,MEMS 陀螺儀的設(shè)計(jì)架構(gòu)中還用到了MEMS加速度計(jì)的基本設(shè)計(jì)單元。
2019-07-31 06:18:004029 本陀螺儀演示視頻介紹2個(gè)ADI MEMS陀螺儀(ADXRS800、ADXRS450)和2個(gè)同類陀螺儀產(chǎn)品。可以看到每個(gè)陀螺儀對(duì)施加的旋轉(zhuǎn)速率所做出的響應(yīng)。同時(shí)還展示了ADI公司陀螺儀出色的沖擊和振動(dòng)抑制性能。
2019-07-16 06:15:002584 本視頻是ADI公司MEMS陀螺儀和同類陀螺儀產(chǎn)品的對(duì)比演示,比較兩者對(duì)錯(cuò)誤輸出激勵(lì)的響應(yīng)。可以看出,我們的結(jié)果新款陀螺儀具有高抗振動(dòng)、抗沖擊性和抗線性加速度特性。
2019-07-16 06:12:002668 陀螺儀能夠測量沿一個(gè)軸或幾個(gè)軸運(yùn)動(dòng)的角速度,是補(bǔ)充MEMS加速計(jì)功能的理想技術(shù)。事實(shí)上,如果組合使用加速計(jì)和陀螺儀這兩種傳感器,系統(tǒng)設(shè)計(jì)人員可以跟蹤并捕捉三維空間的完整運(yùn)動(dòng),為最終用戶提供現(xiàn)場感更強(qiáng)的用戶使用體驗(yàn)、精確的導(dǎo)航系統(tǒng)以及其它功能。
2019-05-20 08:49:405463 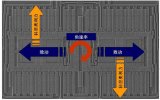
本文主要圍繞嵌套環(huán)MEMS陀螺的關(guān)鍵技術(shù)展開調(diào)研,分析討論了國內(nèi)外主要研究機(jī)構(gòu)在嵌套環(huán)MEMS陀螺關(guān)鍵技術(shù)上的研究思路和進(jìn)展,為后續(xù)嵌套環(huán)MEMS陀螺的研究提供參考和借鑒。
2019-11-30 07:42:007474 
MEMS加速度計(jì)和MEMS陀螺儀的區(qū)別 1、MEMS陀螺儀測角速度的 2、MEMS加速度是測線性加速度的 MEMS陀螺儀MEMS陀螺儀利用科里奧利力旋轉(zhuǎn)物體在有徑向運(yùn)動(dòng)時(shí)所受到的切向力。假設(shè)旋轉(zhuǎn)物
2020-04-16 15:10:422253 MEMS加速度計(jì)和MEMS陀螺儀的區(qū)別 1、MEMS陀螺儀測角速度的 2、MEMS加速度是測線性加速度的 MEMS陀螺儀MEMS陀螺儀利用科里奧利力旋轉(zhuǎn)物體在有徑向運(yùn)動(dòng)時(shí)所受到的切向力。假設(shè)旋轉(zhuǎn)物
2020-06-08 17:01:251624 波音公司提出的嵌套環(huán)MEMS陀螺如圖2(a)所示,其直徑約8mm,環(huán)與環(huán)之間的間隙較大,可以用來設(shè)置內(nèi)部電極用于驅(qū)動(dòng)、檢測或靜電修調(diào)。該陀螺具有較大的等效質(zhì)量和電容面積,采用深反應(yīng)離子刻蝕技術(shù)進(jìn)行加工。
2020-06-01 17:29:353145 近幾年來,MEMS慣性傳感器發(fā)展迅速,精度不斷提高。雖然精度相比光纖陀螺、激光陀螺仍有很大差距,但是其價(jià)格低、體積小、重量輕,使MEMS慣性導(dǎo)航系統(tǒng)在慣性導(dǎo)航系統(tǒng)中發(fā)揮重要作用。
2020-07-14 15:32:553351 Sofant將RF MEMS(射頻微機(jī)電系統(tǒng))用于其取得專利的高效MEMS天線平臺(tái),可解決無線通信系統(tǒng)面臨的若干挑戰(zhàn)。其最初目標(biāo)是用于衛(wèi)星通信和5G,利用MEMS天線技術(shù)降低電子掃描天線陣列70%以上的功耗。
2020-08-31 14:50:561539 AN-942:用數(shù)字控制優(yōu)化MEMS陀螺性能
2021-05-16 11:55:572 MEMS陀螺儀姿態(tài)算法研究綜述
2021-05-26 14:24:1439 一種簡易的MEMS陀螺儀標(biāo)定方法
2021-06-11 14:31:0016 MEMS陀螺捷聯(lián)慣導(dǎo)系統(tǒng)標(biāo)定方法綜述
2021-08-05 16:54:135 Mark Marshall博士將探討這款MEMS陀螺儀的工作原理,并詳細(xì)介紹其性能規(guī)格和Pinpoint結(jié)構(gòu),包括MEMS振動(dòng)環(huán)的設(shè)計(jì)與制造。
2023-03-20 09:43:47846 陀螺儀是測量角速率的一種器件,是慣性系統(tǒng)的重要組成部分,主要用于導(dǎo)航定位、姿態(tài)感知、狀態(tài)監(jiān)測、平臺(tái)穩(wěn)定等應(yīng)用領(lǐng)域。MEMS陀螺儀的核心是一顆微機(jī)械(MEMS)芯片,一顆專用控制電路(ASIC)芯片及應(yīng)力隔離封裝。
2023-04-28 09:59:135522 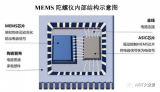
Ericco的MEMS陀螺儀根據(jù)軸數(shù)分為單軸、雙軸和三軸。它分為工業(yè)級(jí)、戰(zhàn)術(shù)級(jí)(ER-MG-056、ER-MG-067)和導(dǎo)航級(jí)(ER-MG2-50/100、ER-MG2-300/400)。戰(zhàn)術(shù)
2023-07-07 10:16:472085 ER-MG2-50/100作為MEMS陀螺儀中的高精度陀螺儀,具有體積小、重量輕、環(huán)境適應(yīng)性強(qiáng)、價(jià)格低廉、便于批量生產(chǎn)等特點(diǎn),解決了第一代和第二代陀螺儀體積質(zhì)量大、成本高的缺點(diǎn),精度和穩(wěn)定性不斷提高
2023-07-10 14:13:18739 
摘要:MEMS(微機(jī)電系統(tǒng))陀螺儀在慣性導(dǎo)航、姿態(tài)控制和運(yùn)動(dòng)測量等領(lǐng)域中具有重要應(yīng)用。然而,傳統(tǒng)MEMS陀螺儀在尺寸和性能方面存在一定的限制。本文介紹了一種基于陶瓷基板的技術(shù)芯片實(shí)現(xiàn)了小型化MEMS
2023-07-10 15:03:37369 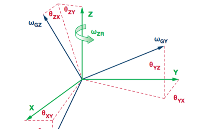
ER-MG2 -50/100高性能尋北MEMS陀螺儀的零偏穩(wěn)定性可達(dá)0.1°/hr,零偏重復(fù)性為0.1°/hr,可見其測量精度非常高。
2023-07-13 09:32:222309 MEMS陀螺儀是一種微機(jī)械系統(tǒng),通過測量物體角速度的變化來感知其運(yùn)動(dòng)狀態(tài)。相較于傳統(tǒng)陀螺儀,MEMS陀螺儀具有體積小、重量輕、功耗低、價(jià)格便宜等優(yōu)點(diǎn),因此在現(xiàn)代導(dǎo)航、姿態(tài)控制等領(lǐng)域得到廣泛應(yīng)用
2023-08-31 15:03:44356 本文介紹了一種用于分離式MEMS陀螺儀的全差分、低閃爍噪聲、自動(dòng)幅度控制(AAC)的ASIC。
2023-10-17 15:20:19422 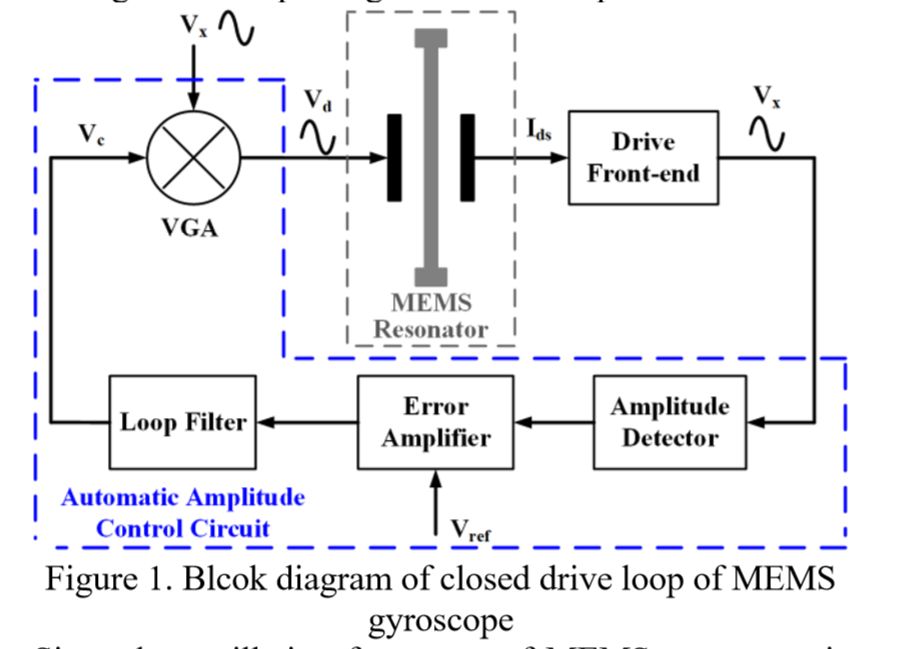
MEMS加速度計(jì)與MEMS陀螺儀是現(xiàn)代慣性導(dǎo)航系統(tǒng)中最常用的傳感器。
2024-02-17 14:05:00345 
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論