 電子發燒友App
電子發燒友App


如果你也不滿足于簡單的手工活,如果你也有一幫和你一樣的兄弟,如果你們想創造和自己一樣能走能爬的機器人,那么請關注這里,我們將分享機器人制作所需的全部秘籍,助大家一臂之力。
1???理論方面
要讓一個機器人能完成各種動作,高中的一些力學,運動學知識自然必不可少。在構建我們的機器人骨架過程中,主要的運動部件就是舵機了,整個機器人就是靠著舵機軸的轉動來完成各種復雜的動作。在設計整體的結構時候,應該畫出各種可能需要做的動作的結構簡圖(用點線表示)簡單計算一下質心高度和位置保證機器人的平衡。
以下是具體的做法:
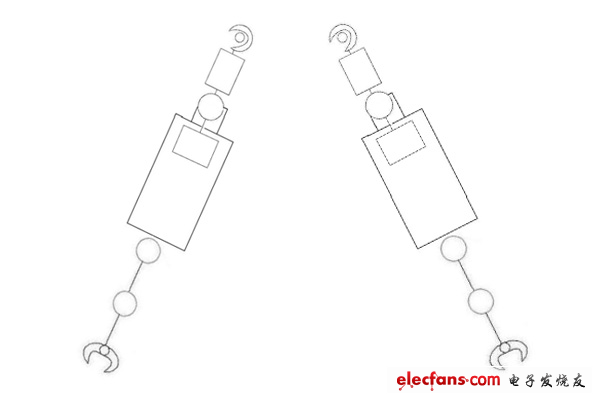
先把舵機看做一個質點,用點加一個小豎線表示舵機的轉軸,直線表示兩個軸之間的距離,大致畫出整體靜態草圖。(兩點之間的距離至少要大于舵機的高)
畫出所需完成動作的分解草圖,將所有運動都分解為繞給定軸的轉動,如果發現有哪些動作無法完成考慮:1.改變軸的排布,方向。2.增加軸
不考慮線的重量,只考慮舵機的重量,對每個草圖分別計算各個過程中機器人的平衡狀況。調整舵機間的長度
Tips1:?每種舵機都會有其尺寸,重量,扭矩,以及轉速等說明。在使用舵機時,應該盡量減小垂直于舵機轉軸的受力,不然容易燒壞舵機。
Tips2:?舵機只能轉180度,在動作中務必排除需要超過180轉動的情況
1.1???我們的大強要完成什么動作呢?
我們要讓大強“飛”起來,作為一只金剛,單單飛似乎少了什么,為此我們給大強設計了《金剛》的路線,一路跋山涉水拯救MM(劇情見最后)
1.?四足行走
由于我們設計的機器人重點放在了手臂上面,故對腿部進行了簡化。行走時采用對角兩條腿交替前進的方式。前進腿(圖中箭頭標注)向前跨步的同時,支撐腿有一個后蹬的動作以實現行走——俗稱“爬”
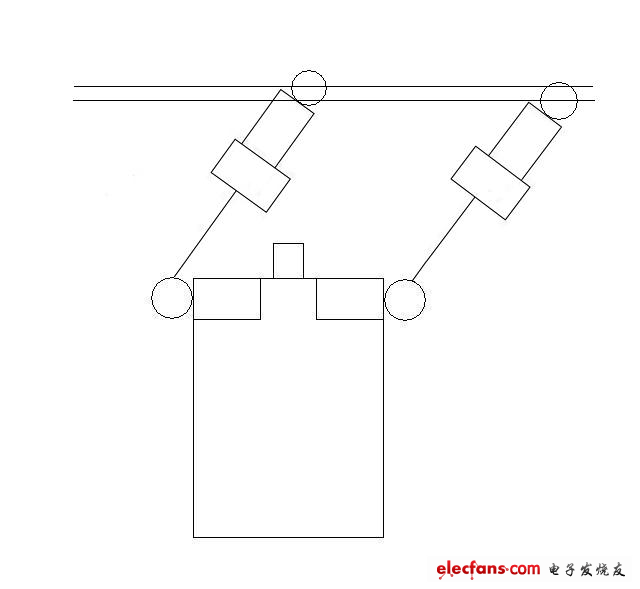
2.?多杠攀爬
這時的大強已經開始了艱苦卓絕的翻山越嶺之路。
多杠連續攀爬并沒有想象中那么簡單,考慮到在前進時有一只手必須離開杠,為保持平衡,故采用左右靜態擺動身體的姿態前進。
A.?開始時通過肩部舵機作用將重心移動到一只手上(圖中為左手)

多杠攀爬動作圖(1)
多杠攀爬動作圖(2)
B.?放開不支撐身體的手臂(圖中右手)向前抓住下一只杠.(左側一列圖是側視圖,右側一列圖是正視時兩只手的位置)
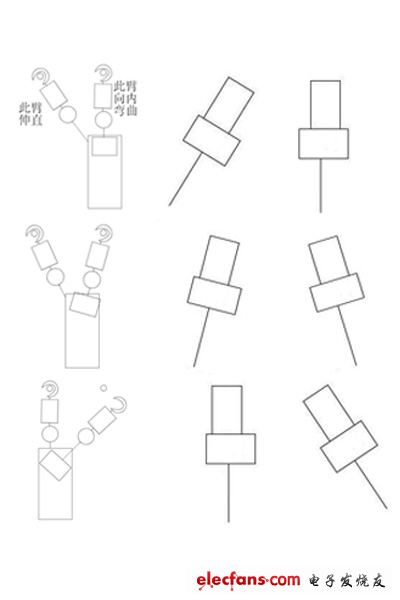
多杠攀爬各動作圖(3)
C.?肩部兩舵機配合向前移動身體,在身體前進的同時將重心轉移到抓住前面橫杠的手上(圖中右手)
D.?放開后面杠上的手(圖中左手)并重復上面的動作,實現多杠上的攀爬行走
3.?單杠動作
終于來到了“她”的身邊,到了展現實力的時候了! 我們不僅要讓大強在多杠上爬行,還要讓他在單杠“飛起來”。
不急,起飛之前先來活動一下筋骨吧!先做100個引體向上吧!!(話說我連十個都做不了)
(1)?引體向上
A.?肩部和肘部的舵機同時用力將身體拉起?B.?肩部和肘部舵機反向用力回到初始位置,完成一個引體向上
引體向上動作圖
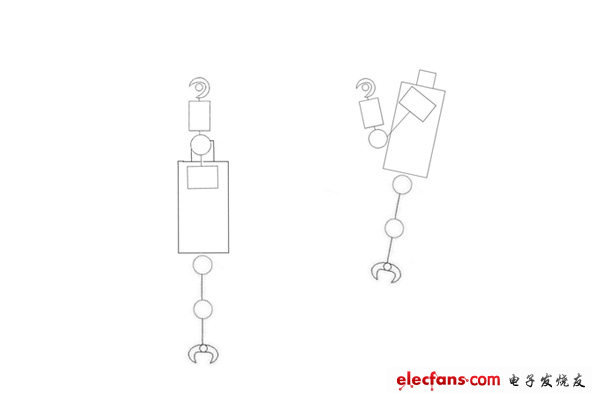
(2)?“飛”吧!
A.?收縮機器人腿部減小力臂,通過肩部舵機的作用將機器人身體從一側提升至高處
單杠翻滾動作(1)
B.?將腿伸直后舵機反向用力使機器人在杠上蕩起
單杠翻滾動作(2)
C.?在向下擺動過程中肩部舵機和腿部舵機同時用力使機器人擺動幅度增大,并在擺至高點后舵機反向用力。對機器人本身,動作和A步驟相同
D.?幾次擺動后便可以完成飛躍的過程
說明:由于我們的大強沒有傳感器,無法判斷自身在杠上的具體姿態,所以我們決定讓機器人在杠上以相同的時間間隔完成固定次數的動作。雖然不一定每次都能成功完成翻滾,但同時每次的動作都不相同,效果也應該不錯。
為了驗證這最為關鍵的一步,我們還動手做了個試驗版:具體過程就不說了,直接上圖

1.2???下面來點靜力分析
為選擇各關節舵機的型號,對其在極端情形下的扭矩進行估算。機器人總質量約2kg。
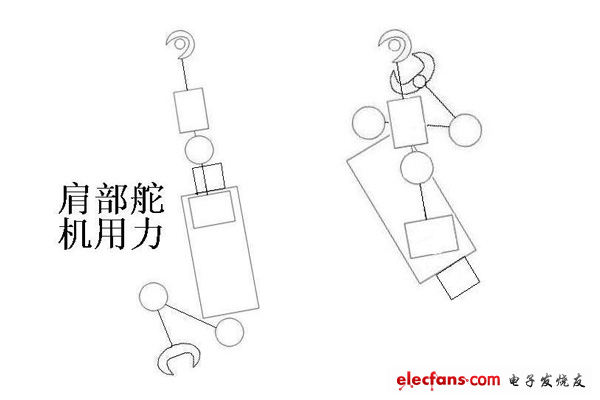
極端姿態1---引體向上:
引體向上受力分析
此時,肘關節受力最大。考慮其靜力矩。估算過程如下: 相對于肘關節,身體的力臂大約為7.5cm,重量約為2kg,考慮兩只手同時用力,每只手受到的力矩為

因此12kg.cm的舵機可以提供足夠的力矩完成動作。
極端姿態2---翻越單杠:
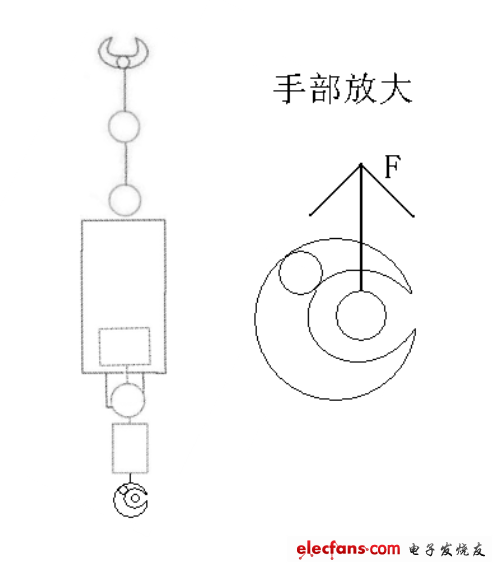
翻越單杠受力分析
手部主要由固定部分承受作用力,舵機不需要提供太大的作用力。當身體翻越單杠時,滑動部分可能會受到一定的作用力,但由于:(1)翻越過程時間很短,對舵機的作用時間不長,(2)有一定的離心力作用,抵消部分重力,(3)該部分受力時,身體質心基本在杠的正上方,力臂很小,對舵機產生的扭矩不大。估計力臂為2cm,重量大小約為2kg,故力矩約為4kg.cm,一只手所受力矩為2kg.cm,小于小舵機的最大力矩5kg.cm,所以不會對舵機產生太大的損壞。
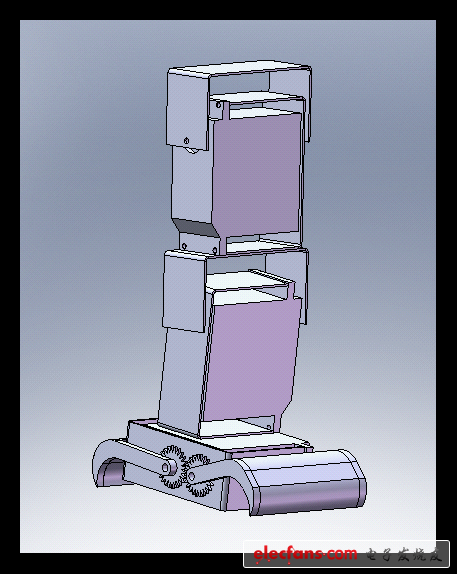
1.3???三維建模
OK,經過以上步驟大家已經得到了一個基本的點線視圖,也基本上能完成動作。但為了避免各種碰撞,以及給電池,電路板留下擺放的位置,這時我們需要一個完整的機器人的三維圖形,手畫還是有點難度的,在這個電腦泛濫的時代,選擇一個好的CAD軟件來幫助畫圖上手會很快(偷懶的好辦法!),并且不需要特殊的制圖工具(省經費的好辦法!)這里我們推薦用容易入手并且 以機械為主的繪圖軟件 SolidWorks 完成機械部分設計。
自學SolidWorks不會太難,因為SolidWorks基本操作都能用鼠標解決,不需要記什么命令(高手可以選擇其他更專業的軟件),另外SolidWorks有由零件的裝配圖直接生成工程圖,以及自動標注尺寸,基本免了自己動手畫,并且絕不會出錯,還有模擬運動等高級功能。
關于solidworks的學習這里就不詳細講了,推薦幾個網上幾個SolidWorks自學教程(去百度google一下有不少,視屏教程最容易入手 看幾個例子跟著操作一下基本上就會了) 參考書的話可以準備兩本,一本以例子多的例如《solidworks 實例》 一本系統點,供快速查閱的例如 《solidworks?2008 從入門到精通》 (看例子出現問題的時候可以翻翻) 當然,最權威最全面的 就是SolidWorks自帶的幫助文檔(不推薦,講的太細,書上找不到解決方法的問題再查閱文檔)。這樣跟著網上教學視屏練得話幾個小時基本上就能上手。
另外,一本機械制圖的教材最好還是備上,主要用來了解一些基本符號 術語 以及很關鍵的 國標——也就是國家規定的標準件。(查到后可以直接在solidworks里面調用畫好的零件,方便省事)知道各種標準件的作用,和基本的固定方法。
2???實際模型圖制作
以下是用cad軟件構建模型的步驟:
具體的連接方式可以先不管,先畫出單個舵機,以及各個關鍵部件(在SolidWorks上畫出來) 主要的零件——舵盤,標準螺絲,螺母等。

舵機。

舵盤。
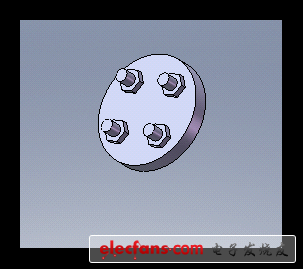
上螺釘的舵盤整體。

齒輪(自己畫的非標準,最后沒有用到……)。
Tip1:?舵機的模型最好做精確些,參照具體型號的標準尺寸(推薦實測)。然后參照已經畫好的點線模型,將點改成舵機,調整好各部位的距離。
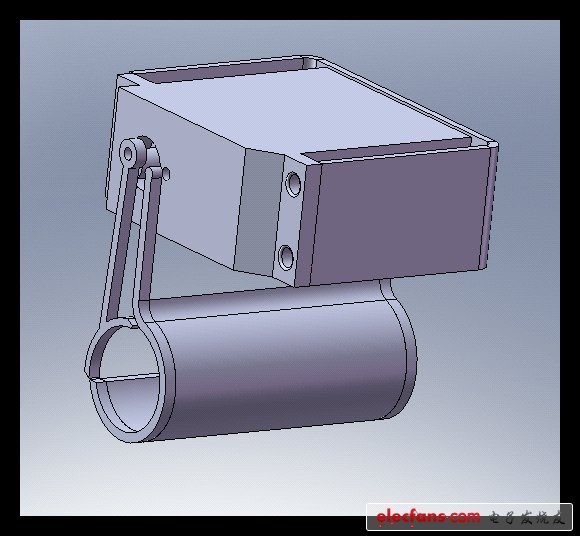
怎樣連接兩個舵機呢?為了讓我們將DIY進行到底,在這里我們選擇自己加工強度大重量輕又容易塑形的1.5mm鋁板,用如下圖這種方式將舵機包起來并與另外的舵機通過軸上固定的舵盤相連。 (這里大家不必拘泥于我們的方法,可以發揮想象力構造自己考慮連接方式。) 在solidworks下將零件組裝成裝配體。
Tips2:?先把各個包好的部分裝配體模塊化,再用由上到下的順序或者由下到上的順序一個個組裝成裝配體。(由于不再是點線的簡單結構了,在這里還要進行各關節的簡單受力分析,盡量通過設計上的改動避免舵機軸承之類脆弱的地方承力。)

用鋁板包好的舵機。
手部的裝配圖。

整個手臂的裝配圖。
整條腿的裝配圖。

完整的機器人裝配圖(原始圖)。
考慮實際的裝配情況,給每個模塊之間合理的連接方式,例如用螺釘螺母固定,萬能膠,熱熔膠,膠帶,繩子,彈簧……盡情的發揮你的想象力吧! 一般相對牢固的方式是通過打孔然后用螺釘螺母固定,采用這種方式的同學們一定要注意了!千萬別忘了考慮螺釘的大小和位置!!
讓我們無視他,繼續做下去吧!將實際的問題反映到模型圖上,即對模型修改(建議對零件改,不要從裝配體上直接改。)
最后檢查是否有重疊,碰撞。
3???實際制作
好了,經過了重重檢驗,一個完美的效果圖終于出來了!各種運動我們也分析好了!開始干力氣活吧!
別急,現在還什么都沒有呢!
3.1???準備工作
買鋁板。
買螺絲,螺母,墊片。
準備個五金工具箱。
有臺鉆,車床,銑床,剪板機,折板機之類大型機器可用最好。
沒有的話:用手鉆代替臺鉆(想?DIY臺鉆?的看過來~),手加臺鉗代替折板機,鐵皮剪或手鋸代替剪板機,車床銑床都可以不用。自給自足!完全DIY!!東西都備齊了,現在開始干活吧!
3.2???具體制作
要有熟悉機械的人指導最好不過,實在沒人教可以翻工具手冊,或上網查各種工具的用法。
首先在鋁板上用油性筆畫出輪廓線包括折線,以及孔的位置。(這一步必須非常精確!)
先用剪板機或鐵皮剪剪下需要部分,接著用折板機或臺鉗折板,然后用臺鉆或手鉆打好孔。最后,對于不滿意的地方——銼!(銼刀才是王道!)理論上來說,木有什么形狀我們銼不出來!!!!!!!!
有的比較復雜或者精度要求比較高的結構比如下圖所示我們機器人的手部結構——需要很精細的加工,并且要承受較大的力,這時則可以考慮用solidworks畫好做好工程圖后,拿去機械廠加工。比如以下幾個結構:

這是我自己設計并送往機械廠加工的的拇指工程圖。(畫紅圈的位置在實際運動過程中發現有點緊,需要稍微磨掉點。)

鉤子的工程圖。
4???組裝
組裝要及時,這樣才能及時發現問題及時修改!
給零件標上號。
將各個模塊裝配好,測試各個模塊的強度,以及靈活程度。
依照從下而上的順序,依次連接好各個部分。
將其他物件如電路板,電池固定到機器人身體上。
對舵機進行布線(可以用膠布將同方向的線束起或者粘在外側),給機器人的運動留下足夠的空間,避免任何可能纏繞或碰撞。
Ok,一個嶄新的機器人 誕生了!!!!鐺鐺鐺鐺(音樂響起~~) 鼓掌!撒花!
注:我們在實際機械制作過程中遇到了各種問題(沒考慮到螺絲粗細),以至于后來手部結構重新設計,由于需要做彎折,而彎折很難做精確,所以沒有再用solidworks畫。想要一點問題都不出還真不是那么簡單。 所謂無圖無真相,大家還是看圖吧!
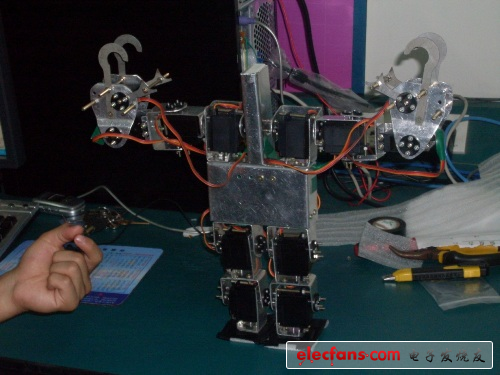
早期的大強










 工商網監
工商網監
評論