 電子發燒友App
電子發燒友App


?
目前飛行試驗中常用的實時監控系統配有雙通道位同步器,支持接收兩路遙測PCM數據流,可同時保障兩架飛機的實時監控。
由于顫振飛行試驗對實時監控系統的實時性、準確性以及可靠性要求較高,而且顫振參數具有很高的采樣率。為保障監控系統的性能,設計實現了獨立于其他飛行參數的顫振數據實時監控系統。其中怎樣保證條圖儀均勻輸出是主要解決的問題。以下將介紹顫振數據專用監控系統的設計思路和工作原理,詳細闡述系統的硬件組成與相關軟件。
1 顫振數據實時監控系統
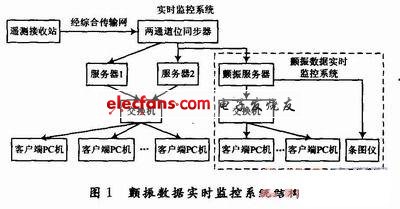
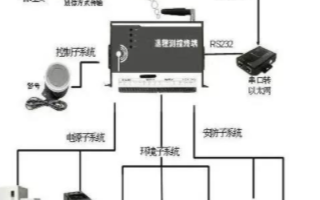
顫振數據實時監控系統結構如圖1所示。在常用的實時系統中增加為顫振數據專用的服務器,使用獨立的局域網。這樣在顫振數據的高采樣率大數據量的情況下,可不占用其他系統帶寬。使雙方不因網絡擁塞丟包導致數據丟失,以此保證整個實時系統的性能。如果系統中只有一臺顫振服務器,監控的兩架飛機中只能一架試飛顫振科目。
?
該系統結構簡單但功能完備,具有多數據源:遙測數據、磁帶數據、磁盤文件;多種工作模式:實時、磁帶回放、磁盤文件數據回放;可每次采集處理多達50個顫振傳感器參數,顫振采樣率小于等于512點/s等特點。
1.1 顫振數據實時監控系統硬件組成
機載測試系統將數據類型為ARINC 422,ARINC 429,FCS,GPS,部分1553B及加裝傳感器參數等數據采集,以PCM(脈沖編碼調制)格式記錄及遙測發射。其中選擇采集的部分1553B總線數據是指按總線號、遠程終端RT號、子地址SA、邏輯塊等總線字的定義,從總線上挑選需要的命令字、狀態字、數據字。對挑選的總線字,格式化為2個連續的PCM字。這些PCM字與其他測試數據合并形成一條主PCM數據流,供遙測發射到地面進行實時監控及機載記錄。
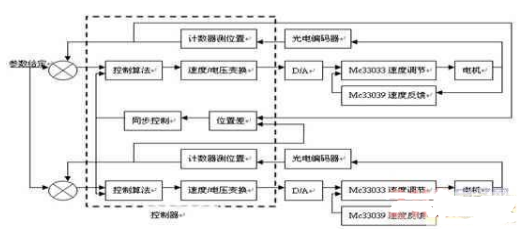
而顫振實時監控系統是完成遙測數據采集、存儲并顯示,由位同步器、PC機、PCM反變換板、D/A變換板、交換機和條圖儀等硬件組成,如圖2所示。

?
發射下來的PCM數據流通過遙測接收機接收后,經綜合傳輸網進入位同步器再到PCM反變換板。完成PCM數據流的反變換后二次同步(即幀同步),前端服務器程序采集、存貯顫振數據,并對存貯的顫振參數數據進行取位、高低字合并、物理量轉換等校準計算。根據需要將監控畫面中使用的參數通過百兆網絡發送到客戶端顯示,并將選定的顫振參數經D/A轉換發送到條圖儀輸出。
1.2 顫振數據實時監控系統軟件及數據傳輸過程
顫振數據實時監控系統軟件及數據傳輸過程如圖3所示。其中顫振數據實時監控系統軟件由前端服務器程序和客戶端實時監控程序組成,形成服務器和客戶端模式。前端服務器軟件需加載帶頭文件,客戶端多幅監控畫面用到的總參數名文件以及條圖儀通道參數名的信息文件。服務器軟件根據加載的帶頭中同步字信息、幀結構信息將接收到的數據進行二次同步,經過同步處理后的數據才能進行校準計算。幀同步后服務器軟件對顫振數據進行采集,在勾選“原始數據存盤”項的情況下存貯數據。

?
實現服務器與客戶端的信息通信及數據傳輸是基于TCP(傳輸控制協議)和UDP(用戶數據報協議),并采用WinSock的網絡編程接口實現其網絡通信。TCP為兩臺主機提供高可靠性的數據通信,為了提供可靠的服務,TCP采用了超時重傳、發送和接收端到端的確認分組等機制;UDP協議只是把稱作數據報的分組從一臺主機發送到另一臺主機,但并不保證該數據報能達到另一端。
因此總參數名文件按TCP協議通信,前端服務器程序將流式套接字置入監聽模式,當有客戶端程序的連接請求時,接受請求并向請求方發送監控參數表,最后斷開與客戶端程序的TCP連接。為了避免因服務器程序晚于客戶端監控程序啟動造成無法與服務器連接的情況,監控程序采用定時器定時向服務器發送連接請求,當連接成功后關閉定時器。
然后將完成取位、高低字合并、物理量轉換后的數據,根據以UDP形式向客戶端程序廣播發送。TCP是一個面向連接的協議,它意味著分別運行于兩主機(由IP地址確定)內的兩進程(由端口號確定)間存在一條連接。建立一個連接需要3次握手,而終止一個連接要經過4次握手。而一端使用UDP向另一端發送數據報時,無需任何預先的握手。UDP是不可靠無連接的,它不能保證數據報能安全無誤地到達最終目的。雖然
UDP協議不提供反饋信息來控制機器之間傳輸的信息流量,可能出現丟包、重復。但在數據傳輸時間很短,以至于此前的連接過程成為整個流量主體的情況下,UDP也是一個好的選擇。本監控系統服務器與客戶端在同一個監控大廳內,傳輸距離很短。因此向客戶端發送數據采用UDP協議而不是TCP協議,以保證高效率發送數據。飛行實踐證明在1.0 Gb/s網速的由25臺PC機組成的局域網內,顫振數據按采樣率512點/s,傳輸200個參數是完全可靠的。
另外,基于UDP協議的通信模式只需將Socket與指定的端口號和本地的IP地址綁定就可進行數據傳輸,控制算法簡單。而且采用UDP協議有利于系統的擴展,可以根據需要在不影響系統性能的前提下減少或增加客戶端微機的數量。
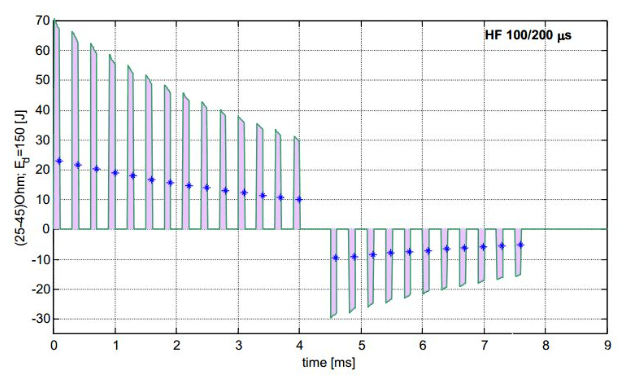
UDP協議不使用確認信息對報文的到達進行確認,也不對收到的報文進行排序。導致報文可能出現延遲以及亂序的現象。但是顫振數據要求嚴格按時間均勻輸出,否則條圖儀繪出的圖形產生變形,有臺階出現,不易辯識試驗動作段。假設顫振數據的采樣率為512點/s,要求計算機系統每隔不到2 ms就要響應1次。因此在現有的操作系統中開發軟件,不能保證服務器均勻地向條圖儀發送數據。為保證顫振數據時間上的均勻性,在用作服務器的PC機上除PCM反變換板外加裝D/A變換板。利用D/A板的緩沖、定時功能,每次向條圖儀發送多個點的數據,設置條圖儀繪圖的時間間隔,實現均勻輸出。
同時由于該系統具有實時、磁帶回放、磁盤文件數據回放多種工作模式,前端服務器程序也可對機載磁帶數據、本系統存貯數據等不同格式的數據進行回放。幫助工程師在試飛的不同階段利用現有格式的數據進行監控畫面的調試,或實現飛行后對感興趣的數據重現。














 工商網監
工商網監
評論