 電子發(fā)燒友App
電子發(fā)燒友App


?
目前飛行試驗中常用的實時監(jiān)控系統(tǒng)配有雙通道位同步器,支持接收兩路遙測PCM數(shù)據(jù)流,可同時保障兩架飛機的實時監(jiān)控。
由于顫振飛行試驗對實時監(jiān)控系統(tǒng)的實時性、準確性以及可靠性要求較高,而且顫振參數(shù)具有很高的采樣率。為保障監(jiān)控系統(tǒng)的性能,設(shè)計實現(xiàn)了獨立于其他飛行參數(shù)的顫振數(shù)據(jù)實時監(jiān)控系統(tǒng)。其中怎樣保證條圖儀均勻輸出是主要解決的問題。以下將介紹顫振數(shù)據(jù)專用監(jiān)控系統(tǒng)的設(shè)計思路和工作原理,詳細闡述系統(tǒng)的硬件組成與相關(guān)軟件。
1 顫振數(shù)據(jù)實時監(jiān)控系統(tǒng)
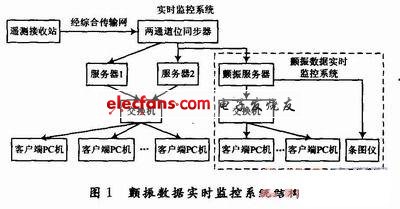
顫振數(shù)據(jù)實時監(jiān)控系統(tǒng)結(jié)構(gòu)如圖1所示。在常用的實時系統(tǒng)中增加為顫振數(shù)據(jù)專用的服務(wù)器,使用獨立的局域網(wǎng)。這樣在顫振數(shù)據(jù)的高采樣率大數(shù)據(jù)量的情況下,可不占用其他系統(tǒng)帶寬。使雙方不因網(wǎng)絡(luò)擁塞丟包導致數(shù)據(jù)丟失,以此保證整個實時系統(tǒng)的性能。如果系統(tǒng)中只有一臺顫振服務(wù)器,監(jiān)控的兩架飛機中只能一架試飛顫振科目。
?
該系統(tǒng)結(jié)構(gòu)簡單但功能完備,具有多數(shù)據(jù)源:遙測數(shù)據(jù)、磁帶數(shù)據(jù)、磁盤文件;多種工作模式:實時、磁帶回放、磁盤文件數(shù)據(jù)回放;可每次采集處理多達50個顫振傳感器參數(shù),顫振采樣率小于等于512點/s等特點。
1.1 顫振數(shù)據(jù)實時監(jiān)控系統(tǒng)硬件組成
機載測試系統(tǒng)將數(shù)據(jù)類型為ARINC 422,ARINC 429,F(xiàn)CS,GPS,部分1553B及加裝傳感器參數(shù)等數(shù)據(jù)采集,以PCM(脈沖編碼調(diào)制)格式記錄及遙測發(fā)射。其中選擇采集的部分1553B總線數(shù)據(jù)是指按總線號、遠程終端RT號、子地址SA、邏輯塊等總線字的定義,從總線上挑選需要的命令字、狀態(tài)字、數(shù)據(jù)字。對挑選的總線字,格式化為2個連續(xù)的PCM字。這些PCM字與其他測試數(shù)據(jù)合并形成一條主PCM數(shù)據(jù)流,供遙測發(fā)射到地面進行實時監(jiān)控及機載記錄。
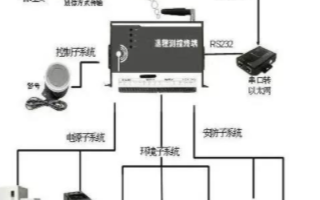
而顫振實時監(jiān)控系統(tǒng)是完成遙測數(shù)據(jù)采集、存儲并顯示,由位同步器、PC機、PCM反變換板、D/A變換板、交換機和條圖儀等硬件組成,如圖2所示。

?
發(fā)射下來的PCM數(shù)據(jù)流通過遙測接收機接收后,經(jīng)綜合傳輸網(wǎng)進入位同步器再到PCM反變換板。完成PCM數(shù)據(jù)流的反變換后二次同步(即幀同步),前端服務(wù)器程序采集、存貯顫振數(shù)據(jù),并對存貯的顫振參數(shù)數(shù)據(jù)進行取位、高低字合并、物理量轉(zhuǎn)換等校準計算。根據(jù)需要將監(jiān)控畫面中使用的參數(shù)通過百兆網(wǎng)絡(luò)發(fā)送到客戶端顯示,并將選定的顫振參數(shù)經(jīng)D/A轉(zhuǎn)換發(fā)送到條圖儀輸出。
1.2 顫振數(shù)據(jù)實時監(jiān)控系統(tǒng)軟件及數(shù)據(jù)傳輸過程
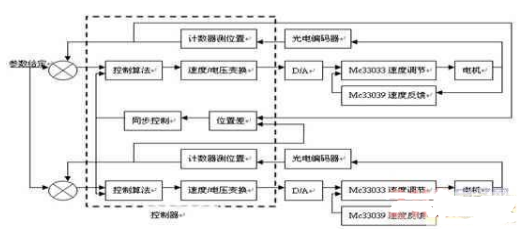
顫振數(shù)據(jù)實時監(jiān)控系統(tǒng)軟件及數(shù)據(jù)傳輸過程如圖3所示。其中顫振數(shù)據(jù)實時監(jiān)控系統(tǒng)軟件由前端服務(wù)器程序和客戶端實時監(jiān)控程序組成,形成服務(wù)器和客戶端模式。前端服務(wù)器軟件需加載帶頭文件,客戶端多幅監(jiān)控畫面用到的總參數(shù)名文件以及條圖儀通道參數(shù)名的信息文件。服務(wù)器軟件根據(jù)加載的帶頭中同步字信息、幀結(jié)構(gòu)信息將接收到的數(shù)據(jù)進行二次同步,經(jīng)過同步處理后的數(shù)據(jù)才能進行校準計算。幀同步后服務(wù)器軟件對顫振數(shù)據(jù)進行采集,在勾選“原始數(shù)據(jù)存盤”項的情況下存貯數(shù)據(jù)。

?
實現(xiàn)服務(wù)器與客戶端的信息通信及數(shù)據(jù)傳輸是基于TCP(傳輸控制協(xié)議)和UDP(用戶數(shù)據(jù)報協(xié)議),并采用WinSock的網(wǎng)絡(luò)編程接口實現(xiàn)其網(wǎng)絡(luò)通信。TCP為兩臺主機提供高可靠性的數(shù)據(jù)通信,為了提供可靠的服務(wù),TCP采用了超時重傳、發(fā)送和接收端到端的確認分組等機制;UDP協(xié)議只是把稱作數(shù)據(jù)報的分組從一臺主機發(fā)送到另一臺主機,但并不保證該數(shù)據(jù)報能達到另一端。
因此總參數(shù)名文件按TCP協(xié)議通信,前端服務(wù)器程序?qū)⒘魇教捉幼种萌氡O(jiān)聽模式,當有客戶端程序的連接請求時,接受請求并向請求方發(fā)送監(jiān)控參數(shù)表,最后斷開與客戶端程序的TCP連接。為了避免因服務(wù)器程序晚于客戶端監(jiān)控程序啟動造成無法與服務(wù)器連接的情況,監(jiān)控程序采用定時器定時向服務(wù)器發(fā)送連接請求,當連接成功后關(guān)閉定時器。
然后將完成取位、高低字合并、物理量轉(zhuǎn)換后的數(shù)據(jù),根據(jù)以UDP形式向客戶端程序廣播發(fā)送。TCP是一個面向連接的協(xié)議,它意味著分別運行于兩主機(由IP地址確定)內(nèi)的兩進程(由端口號確定)間存在一條連接。建立一個連接需要3次握手,而終止一個連接要經(jīng)過4次握手。而一端使用UDP向另一端發(fā)送數(shù)據(jù)報時,無需任何預(yù)先的握手。UDP是不可靠無連接的,它不能保證數(shù)據(jù)報能安全無誤地到達最終目的。雖然
UDP協(xié)議不提供反饋信息來控制機器之間傳輸?shù)男畔⒘髁浚赡艹霈F(xiàn)丟包、重復。但在數(shù)據(jù)傳輸時間很短,以至于此前的連接過程成為整個流量主體的情況下,UDP也是一個好的選擇。本監(jiān)控系統(tǒng)服務(wù)器與客戶端在同一個監(jiān)控大廳內(nèi),傳輸距離很短。因此向客戶端發(fā)送數(shù)據(jù)采用UDP協(xié)議而不是TCP協(xié)議,以保證高效率發(fā)送數(shù)據(jù)。飛行實踐證明在1.0 Gb/s網(wǎng)速的由25臺PC機組成的局域網(wǎng)內(nèi),顫振數(shù)據(jù)按采樣率512點/s,傳輸200個參數(shù)是完全可靠的。
另外,基于UDP協(xié)議的通信模式只需將Socket與指定的端口號和本地的IP地址綁定就可進行數(shù)據(jù)傳輸,控制算法簡單。而且采用UDP協(xié)議有利于系統(tǒng)的擴展,可以根據(jù)需要在不影響系統(tǒng)性能的前提下減少或增加客戶端微機的數(shù)量。
UDP協(xié)議不使用確認信息對報文的到達進行確認,也不對收到的報文進行排序。導致報文可能出現(xiàn)延遲以及亂序的現(xiàn)象。但是顫振數(shù)據(jù)要求嚴格按時間均勻輸出,否則條圖儀繪出的圖形產(chǎn)生變形,有臺階出現(xiàn),不易辯識試驗動作段。假設(shè)顫振數(shù)據(jù)的采樣率為512點/s,要求計算機系統(tǒng)每隔不到2 ms就要響應(yīng)1次。因此在現(xiàn)有的操作系統(tǒng)中開發(fā)軟件,不能保證服務(wù)器均勻地向條圖儀發(fā)送數(shù)據(jù)。為保證顫振數(shù)據(jù)時間上的均勻性,在用作服務(wù)器的PC機上除PCM反變換板外加裝D/A變換板。利用D/A板的緩沖、定時功能,每次向條圖儀發(fā)送多個點的數(shù)據(jù),設(shè)置條圖儀繪圖的時間間隔,實現(xiàn)均勻輸出。
同時由于該系統(tǒng)具有實時、磁帶回放、磁盤文件數(shù)據(jù)回放多種工作模式,前端服務(wù)器程序也可對機載磁帶數(shù)據(jù)、本系統(tǒng)存貯數(shù)據(jù)等不同格式的數(shù)據(jù)進行回放。幫助工程師在試飛的不同階段利用現(xiàn)有格式的數(shù)據(jù)進行監(jiān)控畫面的調(diào)試,或?qū)崿F(xiàn)飛行后對感興趣的數(shù)據(jù)重現(xiàn)。
2 實時監(jiān)控畫面及條圖儀數(shù)據(jù)輸出
系統(tǒng)服務(wù)器程序提供靈活的軟件接口,支持多種軟件制作監(jiān)控畫面。于是在系統(tǒng)中的客戶端即用作顯示監(jiān)控畫面的PC機上,安裝多種編程軟件以提供采用了各種接口監(jiān)控畫面的運行環(huán)境。畫面采用數(shù)字量、信號燈、時間歷程曲線等監(jiān)控圖形相結(jié)合,畫面美觀、數(shù)據(jù)顯示清晰直觀。
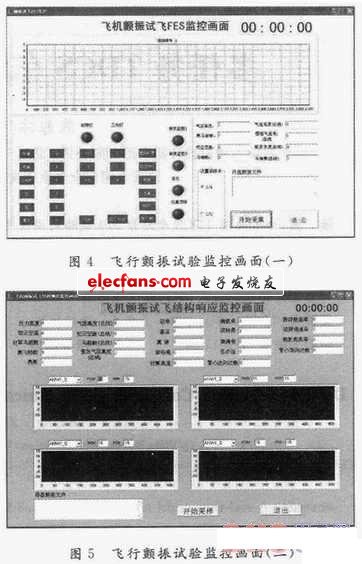
采用C++ Builder實現(xiàn)的實時監(jiān)控畫面如圖4,圖5所示。
?
顫振激勵系統(tǒng)監(jiān)控畫面,要求在另一臺微機或本微機上建一個存放結(jié)果的目錄,將其完全共享(如在另一臺微機上),將其映射為本機的N盤。開始接收服務(wù)器發(fā)送過來的數(shù)據(jù),并實時顯示、采樣。如自動采樣,則根據(jù)標志動作的開關(guān)量自動采樣存盤,每次開始采樣時,會發(fā)出“嘟”聲,同時在列表框中顯示保存的文件名。每次保存3組:1組常規(guī)參數(shù),2組顫振參數(shù),這些都可根據(jù)不同飛機的實際情況修改。如為手動采樣,每點擊“采樣”一次,則采樣一次。點擊“停止”,則停止采集,點擊“退出”則退出畫面。圖4即為手動采樣畫面。
顫振試飛結(jié)構(gòu)響應(yīng)監(jiān)控畫面如圖5所示。畫面只要啟動起來,當服務(wù)器發(fā)送數(shù)據(jù)過來,監(jiān)控畫面就會不停地實時顯示。選擇圖中四個列表框中的參數(shù)名,下面的四個圖表會實時畫出該參數(shù)的時間歷程曲線,如激勵信號觸發(fā),圖形會自動重畫,因此激勵波形總是顯示在最左邊。
為了在屏幕上實時畫出高采樣率的顫振參數(shù)的時間歷程曲線,采取了較特殊的畫圖方法,向屏幕上輸出若干點后再刷新屏幕,這樣屏幕繪圖均勻流暢,不出現(xiàn)遲滯現(xiàn)象。
監(jiān)控畫面可根據(jù)不同類型科目按課題人員需要靈活設(shè)計。比如,如果是脈沖激勵,根據(jù)動作開關(guān)量自動或手動采樣數(shù)據(jù),動作開關(guān)量、保存的塊大小靈活可設(shè);如果是掃頻激勵,可通過鼠標選取要保存的動作段數(shù)據(jù)。
以上即為數(shù)據(jù)的實時顯示,數(shù)據(jù)實時輸出選擇用條圖儀實現(xiàn)。常見的條圖儀有16路通道,可同時輸出16個顫振參數(shù)。服務(wù)器軟件根據(jù)上文提到的條圖儀參數(shù)名信息文件選擇小于等于16個顫振參數(shù),經(jīng)D/A變換板轉(zhuǎn)換輸出模擬信號到條圖儀打印輸出,以控制數(shù)據(jù)的均勻性。在飛機做試驗動作時刻對已選定的顫振參數(shù)用條圖儀直接輸出,通過觀看條圖儀繪出的試驗動作段數(shù)據(jù)圖形了解飛行試驗情況。
3 結(jié)語
該顫振監(jiān)控系統(tǒng)具有優(yōu)良的實時性、可靠性以及精確性。硬件配置簡潔合理,軟件操作簡便、支持多種接口,而且監(jiān)控畫面數(shù)據(jù)顯示清晰直觀。目前已用于多種型號的飛行顫振試驗中,對飛行的安全性及試驗任務(wù)的圓滿完成發(fā)揮了重要作用。














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論