 電子發(fā)燒友App
電子發(fā)燒友App


火箭炮能否迅速展開火力打擊是衡量其武器系統(tǒng)作戰(zhàn)性能的重要因素。火箭炮在對(duì)目標(biāo)實(shí)施準(zhǔn)確打擊之前,必須對(duì)其進(jìn)行精確的調(diào)平。目前,部隊(duì)在對(duì)火箭炮車體平臺(tái)進(jìn)行調(diào)平時(shí),調(diào)平過程復(fù)雜,協(xié)調(diào)要求高。調(diào)平過程通常需要三個(gè)人配合完成,一人站在梯子上觀察放于回轉(zhuǎn)盤水準(zhǔn)儀檢查座上的水準(zhǔn)儀,兩人位于車下手動(dòng)操作兩個(gè)千斤頂,一般要經(jīng)過多次調(diào)試才能完全使車體縱橫向水平。檢查調(diào)整完后,若車體水平發(fā)生變化,又要重復(fù)以上調(diào)平過程。這種調(diào)平方式耗時(shí)長(zhǎng),調(diào)平過程繁瑣、費(fèi)時(shí)費(fèi)力,且不便于指揮、協(xié)調(diào)困難,精度也得不到保證。因此,部隊(duì)亟需一種能動(dòng)態(tài)顯示車體姿態(tài),并指示操作手操作的指示器。本文基于STC12C5616AD單片機(jī)設(shè)計(jì)一種能夠?qū)圀w平臺(tái)的傾斜狀態(tài)進(jìn)行自動(dòng)顯示的操作指示器。
操作指示器的組成及工作原理
操作指示器結(jié)構(gòu)組成如圖1所示,由主控制器、無線數(shù)傳模塊和液晶顯示屏等組成。其工作原理:操作指示器通過無線數(shù)傳模塊接收到從傾斜檢測(cè)儀輸出的縱向和橫向傾斜角度數(shù)據(jù),并對(duì)數(shù)據(jù)進(jìn)行處理和運(yùn)算,然后通過液晶屏幕顯示出車體的縱橫向傾斜角度,并根據(jù)數(shù)據(jù)的運(yùn)算結(jié)果,指示出左右兩個(gè)千斤頂需要進(jìn)一步調(diào)整的方向。傾斜檢測(cè)儀放置于回轉(zhuǎn)盤水準(zhǔn)儀檢查座上,兩個(gè)操作指示器分別吸附于兩個(gè)千斤頂旁或戴在操作人員手臂上,兩名操作手觀察各自的指示器即可調(diào)平車體。液晶顯示采用的是COG封裝的12864液晶屏,采用串行SPI總線驅(qū)動(dòng),這種液晶屏幕驅(qū)動(dòng)芯片直接集成到玻璃基板上,體積小、省電,背光電路設(shè)計(jì)靈活。
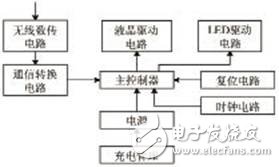
圖1 操作指示器結(jié)構(gòu)組成圖
主控制器的選型及電路設(shè)計(jì)
主控制器的選型
操作指示器的控制核心選用STC12C5616AD單片機(jī)。該芯片具有如下特點(diǎn):
(1)高速:1個(gè)時(shí)鐘/機(jī)器周期,增強(qiáng)型8051內(nèi)核,平均指令運(yùn)算速度比標(biāo)準(zhǔn)8051快8~12倍。
(2)寬電壓:5.5V~3.3V。
(3)增加第二復(fù)位功能腳(高可靠復(fù)位,可調(diào)整復(fù)位門檻電壓,頻率《12MHz時(shí),無需此功能)。
(4)增加外部掉電檢測(cè)電路,可在掉電時(shí),及時(shí)將數(shù)據(jù)保存進(jìn)EEPROM,正常工作時(shí)無需EEP。
(5)低功耗設(shè)計(jì):掉電模式(可由外部中斷喚醒),可支持下降沿/上升沿和遠(yuǎn)程喚醒。
(6)低功耗設(shè)計(jì):空閑模式(可由任意一個(gè)中斷喚醒);掉電模式(可由外部中斷喚醒),可支持下降沿/上升沿和遠(yuǎn)程喚醒。
(7)工作頻率:0~35MHz,相當(dāng)于普通8051:0~420MHz。
(8)時(shí)鐘:外部晶體或內(nèi)部RC振蕩器可選,在ISP下載編程用戶程序時(shí)設(shè)置。
(9)8/16/20/32/40/48/52/56/60/62K字節(jié)片內(nèi)Flash程序存儲(chǔ)器,擦寫次數(shù)10萬次以上。
(10)1280字節(jié)片內(nèi)RAM數(shù)據(jù)存儲(chǔ)器
(11)ISP/IAP,在系統(tǒng)可編程/在應(yīng)用可編程,無需編程器/仿真器。
(12)8通道,10位高速ADC,速度可達(dá)25萬次/秒,2路PWM還可當(dāng)2路D/A使用。
(13)2通道捕獲/比較單元(PWM/PCA/CCP),也可用來再實(shí)現(xiàn)2個(gè)定時(shí)器或2個(gè)外部中斷(支持上升沿/下降沿中斷)。
(14)4個(gè)16位定時(shí)器,兼容普通8051的定時(shí)器T0/T1,2路PCA實(shí)現(xiàn)2個(gè)定時(shí)器。
(15)可編程時(shí)鐘輸出功能,T0在P3.4輸出時(shí)鐘,T1在P3.5輸出時(shí)鐘,BRT在P1.0輸出時(shí)鐘。
(18)全雙工異步串行(UART),兼容普通8051的串口。
(19)先進(jìn)的指令集結(jié)構(gòu),兼容普通8051指令集,有硬件乘法/除法指令。
(20)通用I/O口(36/40/44個(gè)),復(fù)位后為:準(zhǔn)雙向口/弱上拉(普通8051傳統(tǒng)I/O口)可設(shè)置成四種模式:準(zhǔn)雙向口/弱上拉,推挽/強(qiáng)上拉,僅為輸入/高阻,開漏每個(gè)I/O口驅(qū)動(dòng)能力均可達(dá)到20mA,但整個(gè)芯片最大不超過100mA。
主控制器電路設(shè)計(jì)
操作指示器的主控制器采用的芯片是STC12C5616AD單片機(jī),具備一個(gè)串口UART0和一個(gè)SPI總線接口,采用的3.3V供電,具有低功耗,指令執(zhí)行效率高的特點(diǎn)。由于ZigBee無線數(shù)傳模塊和LCM屏都采用TTL電平驅(qū)動(dòng)。因此,控制器通過UART0直接接到無線數(shù)傳模塊上;通過SPI總線相關(guān)端口,直接接到LCM模塊的數(shù)據(jù)傳輸端。具體的電路原理如圖2所示。
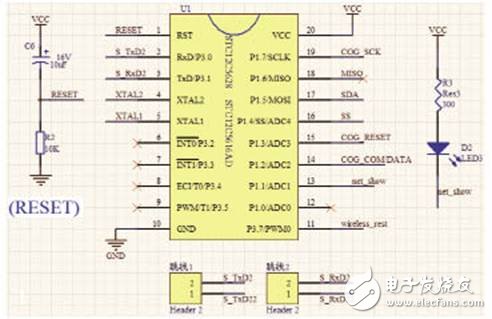
圖2 操作指示器主控制器電路原理圖
顯示屏的簡(jiǎn)介及其接口電路設(shè)計(jì)
顯示屏的簡(jiǎn)介
實(shí)際上,可將一般單純的TN型與TFT型液晶顯示器面板視為僅僅是一個(gè)經(jīng)由組合上下兩片玻璃后并灌注進(jìn)液晶的一個(gè)簡(jiǎn)單結(jié)構(gòu)品。在應(yīng)用時(shí),必須施加驅(qū)動(dòng)電壓到LCD的接口端上,這樣才可以通過電能所產(chǎn)生的電場(chǎng)將液晶分子按照要求分布,由此產(chǎn)生顯示畫面。通常,把驅(qū)動(dòng)LCD的技術(shù)都集成在一個(gè)IC芯片(Driver IC)上,由其產(chǎn)生驅(qū)動(dòng)電壓波形。簡(jiǎn)單地講,LCM(Liquid Crystal Module)就是把此Driver IC與LCD面板連接起來,可以完成LCD顯示功能的模塊。隨著商品的不斷多樣化,各種數(shù)碼產(chǎn)品對(duì)液晶模塊(LCM)的形式、性能要求也不斷地豐富、更新,不斷地加入其他組成部件:柔性印刷電路板、背光模組、印刷電路板等,使LCM能夠滿足多種產(chǎn)品的需要。目前,LCM的工藝已經(jīng)發(fā)展為體積小、薄形化技術(shù)。按照Driver IC的封裝形式分為COG工藝、TAB工藝和COF工藝。在此主要介紹COG工藝。
COG(Chip On Glass)工藝:使用的Driver IC為COG IC,該技術(shù)通過把Driver IC直接安裝在液晶面板玻璃底板上,從液晶面板外掛的印刷電路板上去掉液晶驅(qū)動(dòng)器IC,減小了電路面積,且易于大批量生產(chǎn),適用于消費(fèi)類電子產(chǎn)品所用的LCD,如:手機(jī)、PDA等便攜式電子產(chǎn)品。在COG工藝中,采用ACF將IC與LCD連接起來,使得COG IC芯片直接連接在玻璃上。關(guān)鍵點(diǎn)是IC的BUMP對(duì)準(zhǔn)LCD的ITO線路,不能偏移,為了避免這一點(diǎn),在LCD面板上設(shè)計(jì)有COG工藝對(duì)位標(biāo)記,在COG IC芯片上也要設(shè)計(jì)相應(yīng)的對(duì)位標(biāo)記。在進(jìn)行壓合前,要找到二者的對(duì)位標(biāo)記,對(duì)準(zhǔn)后進(jìn)行壓合,從而使COG IC與LCD上的ITO線路導(dǎo)通。
TAB(Tape Automated Bonding)工藝:將封裝形式為TCP(Tape Carrier Package, 帶載封裝)的Driver IC用各向異性導(dǎo)電膜依次固定在LCD和PCB上。這種安裝方式可減小LCM的重量、體積,安裝方便,可靠性較好,是比較成熟的工藝技術(shù)。
COF(Chip On Film)工藝:芯片被直接安裝在柔性PCB上。這種連接方式的集成度較高,外圍元件可以與IC一起安裝在柔性PCB上,是一種新興技術(shù)。
目前LCD模塊的各種工藝技術(shù)中,能夠做到較小、較薄體積的,應(yīng)屬COG及COF工藝。本文指示器中采用的就是COG封裝形式的12864屏。
COG12864接口電路設(shè)計(jì)
操作指示器的液晶顯示屏,采用的是COG封裝形式的12864屏,最大尺寸為43mm×40mm,加上背板電路后的厚度也僅為5mm,功耗在不帶背光的情況下只有10mW,在帶有背光的情況下也不大于100mW。工作電壓僅為3.3V,內(nèi)置升壓電路,外部只要配上相應(yīng)的電容即可。其電路原理如圖3所示。
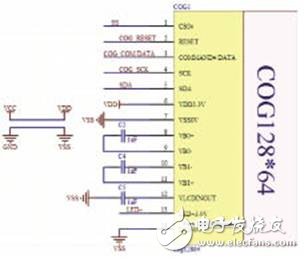
圖3 COG12864接口電路原理圖
無線通信模塊選型及其通信聯(lián)絡(luò)
操作指示器與傾斜檢測(cè)儀之間的控制指令采用無線傳輸方式,用以實(shí)現(xiàn)操作操作指示器與傾斜檢測(cè)儀的數(shù)據(jù)通信。
無線通信模塊的選型
操作指示器無線通信模塊選用的是深圳振通公司推出ZT-TR43C無線數(shù)傳模塊,該模塊的主要特點(diǎn)有:
①頻率源采用高穩(wěn)定度晶體振蕩,頻率穩(wěn)定度高,抗干擾性強(qiáng);
②透明式數(shù)據(jù)傳輸,方便靈活;
③可長(zhǎng)時(shí)間連續(xù)發(fā)射;
④同時(shí)具有串口通訊即狀態(tài)觸發(fā)功能;
⑤接收具有省電功能,適用于電池供電的場(chǎng)合;
⑥具有良好的發(fā)射匹配,輻射場(chǎng)強(qiáng)大,單位功率通信距離遠(yuǎn)。
該模塊的主要技術(shù)指標(biāo)為:
① 載波頻率433MHz,工作頻率428MHz~435MHz;
②最大發(fā)射功率為20mW,接收靈敏度為﹣105dBm,開闊地的最大傳輸距離為3km;
③采用FSK調(diào)制,采用前向信道糾錯(cuò)編碼,抗干擾能力強(qiáng);
④有八個(gè)工作信道可供選擇;
⑤傳輸速率20kbps;
⑥降低噪聲放大器LNA、功率放大器PA、壓空振蕩器VCO等大部分功能集成在芯片內(nèi),外圍電路簡(jiǎn)單易于開發(fā)。
無線通信模塊通信聯(lián)絡(luò)
無線數(shù)傳模塊具有無線接收和發(fā)送的功能,本文采用無線數(shù)傳模塊ZT-TR43C實(shí)現(xiàn)執(zhí)行終端與控制中心通信。在通信前串口的數(shù)據(jù)幀格式與速率應(yīng)與模塊的設(shè)置一致。上位機(jī)與模塊間的通信內(nèi)容有兩類:一類是數(shù)據(jù),一類是命令。數(shù)據(jù)或命令是靠DTR或DSR信號(hào)來區(qū)分的。
ZT-TR43C的命令傳送格式為:

其中,D7H為命令碼的特征碼即字頭,命令碼為一個(gè)字節(jié)長(zhǎng)度,代表命令的性質(zhì)。不同的命令碼有不同的參數(shù)。模塊收到命令后,根據(jù)命令碼的不同,分析參數(shù)并執(zhí)行命令。對(duì)于有些發(fā)送信息的命令,模塊將根據(jù)命令的性質(zhì)發(fā)送相應(yīng)的命令。具體的程序?qū)崿F(xiàn)思想如下:
(1)無線數(shù)傳模塊發(fā)送過程:當(dāng)模塊收到上位機(jī)的數(shù)據(jù)后,模塊先通過DTR線判斷收到的數(shù)據(jù)是命令還是發(fā)送數(shù)據(jù),若是命令則執(zhí)行相應(yīng)的命令;若是發(fā)送數(shù)據(jù)則先將要發(fā)送的數(shù)據(jù)送到發(fā)送緩沖區(qū),并同時(shí)將模塊的狀態(tài)由接收狀態(tài)轉(zhuǎn)換成發(fā)射狀態(tài),這個(gè)轉(zhuǎn)換過程需要100ms,狀態(tài)轉(zhuǎn)換完成后啟動(dòng)發(fā)送打包程序。發(fā)送打包程序的功能是將緩沖區(qū)的數(shù)據(jù)打成適合無線發(fā)送的數(shù)據(jù)包,并將一些控制命令動(dòng)態(tài)地插入到數(shù)據(jù)包中。然后將這個(gè)數(shù)據(jù)包的數(shù)據(jù)送到模塊中的數(shù)據(jù)調(diào)制口,按V23協(xié)議以FSK的調(diào)制方式發(fā)射出去。在這個(gè)過程中所有的進(jìn)程均是并行完成的。
(2)無線數(shù)傳模塊接收過程:在接收狀態(tài)下,接收機(jī)總是接收碼流中的同步信息,一旦收到同步信息立刻進(jìn)行位同步,獲得位同步后進(jìn)行碼同步,碼同步完成后接收數(shù)據(jù)及控制信息。收到數(shù)據(jù)后,按規(guī)定的串口幀格式傳送給上位機(jī)。
無線數(shù)傳模塊采用的是2.4GHz的通信頻段,有效的通信距離為300m,具備自動(dòng)組網(wǎng)功能。其控制程序分為模塊的設(shè)定和模塊的使用兩部分。模塊的設(shè)定需要使用廠家提供的HAC_studio軟件進(jìn)行設(shè)置,設(shè)定無線模塊的通信方式、通信的功率和通信的信道。通信方式采用的是透明工作方式,加電后自動(dòng)搜尋網(wǎng)絡(luò)。
通信的波特率默認(rèn)為138400bps,單片機(jī)需要9600bps,信道采用默認(rèn)信道0A。握手程序采用操作指示器向傾斜檢測(cè)儀發(fā)送握手?jǐn)?shù)據(jù)0x55、0xAA,傾斜檢測(cè)儀通過中斷的方式收到握手?jǐn)?shù)據(jù)后,回復(fù)握手?jǐn)?shù)據(jù)給操作指示器,無線握手完成。無線數(shù)傳模塊控制程序如圖4所示。
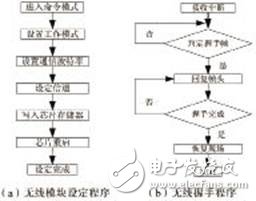
圖4 無線數(shù)傳模塊控制流程圖
操作指示器PCB板圖
圖5所示為操作指示器的PCB板圖。
圖5 操作指示器PCB板圖
操作指示器結(jié)構(gòu)設(shè)計(jì)
操作指示器機(jī)殼整體采用鋁合金加工,內(nèi)置電路板、顯示器、電源和無線通信模塊。底部嵌有磁鐵,可以吸附于車體或千斤頂上,兩側(cè)有扣環(huán),可以將指示器扣于手臂上,便于隨身攜帶和觀察。操作指示器實(shí)物如圖6所示。
圖6 操作指示器 實(shí)物圖
結(jié)束語
目前,火箭炮車體調(diào)平過程費(fèi)時(shí)費(fèi)力,部隊(duì)亟需一種能動(dòng)態(tài)顯示車體姿態(tài),并指示操作手操作的指示器。本文首先闡述了操作指示器的組成及工作原理,然后通過分析比較,選擇了操作指示器的主控制器、液晶顯示屏和無線數(shù)傳模塊,并完成了主控制器和顯示屏的電路設(shè)計(jì),闡述了無線數(shù)傳模塊的通信聯(lián)絡(luò),最后完成了操作指示器的結(jié)構(gòu)設(shè)計(jì)。該操作指示器工作運(yùn)行可靠,能指示操作手進(jìn)行車體調(diào)平,有效提高了調(diào)平工作效率。











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論