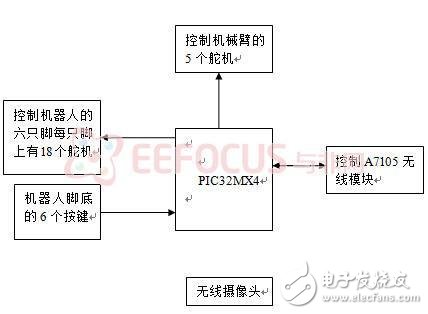
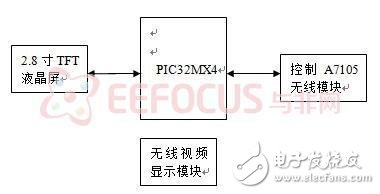
本設(shè)計(jì)主要研究的是小型仿生六足機(jī)器人控制系統(tǒng)的開發(fā),其采用自主設(shè)計(jì)的控制器作為硬件平臺(tái)。控制器主要有微處理器、驅(qū)動(dòng)模塊、電源模塊、外圍擴(kuò)展構(gòu)成。其中驅(qū)動(dòng)模塊采用了分時(shí)復(fù)用的原理,將處理器的 3 路
2020-10-13 09:13:11
求大神上傳一個(gè)六足機(jī)器人的骨架圖紙
2014-07-28 10:32:54
誰(shuí)會(huì)做六足機(jī)器人,求資料??大神們
2013-06-06 00:01:39
科學(xué)技術(shù)發(fā)展和人類社會(huì)進(jìn)步的需要。地形不規(guī)則和崎嶇不平是這些環(huán)境的共同特點(diǎn)。從而使輪式機(jī)器人和履帶式機(jī)器人的應(yīng)用受到限制。以往的研究表明輪式移動(dòng)方式在相對(duì)平坦的地形上行駛時(shí),具有相當(dāng)?shù)膬?yōu)勢(shì)運(yùn)動(dòng)速度迅速、
2021-09-13 06:47:51
,而且還具有記憶能力、語(yǔ)言理解能力、圖像識(shí)別能力、推理判斷能力等人工智能,這些都是微電子技術(shù)的應(yīng)用,特別是計(jì)算機(jī)技術(shù)的應(yīng)用密切相關(guān)。六軸關(guān)節(jié)工業(yè)機(jī)器人的研發(fā)設(shè)計(jì)及制造已經(jīng)有好幾十年的歷史了,整個(gè)工業(yè)機(jī)器人的研發(fā)制造體系較為完善,各研發(fā)廠家在相互競(jìng)爭(zhēng)中可以相互模仿、改善、不斷推陳出新。
2017-08-08 11:30:29
請(qǐng)各位大神指導(dǎo),移動(dòng)式機(jī)器人是怎么做EMC保護(hù)的,機(jī)器人是鋰電池供電,所以就不能接大地了,那么對(duì)機(jī)器人的干擾是通過(guò)何種方式來(lái)釋放或轉(zhuǎn)移的?
2016-07-26 13:33:14
搭載機(jī)器人制作入門機(jī)器人DIY系列雙足步行機(jī)器人DIY輕輕松松制作機(jī)器人雙足步行機(jī)器人制作入門青少年科技創(chuàng)新叢書ROBOTC與機(jī)器人程序設(shè)計(jì)樂(lè)高:實(shí)戰(zhàn)EV3/青少年科技創(chuàng)新叢書Java與樂(lè)高機(jī)器人機(jī)器人
2015-02-22 07:34:56
機(jī)器人想法創(chuàng)意,不錯(cuò)過(guò)精彩內(nèi)容素材來(lái)源:電路城機(jī)器人迅速發(fā)展,隨之涌現(xiàn)出了一大堆創(chuàng)意機(jī)器人設(shè)計(jì),魔方機(jī)器人,尋跡機(jī)器人,六足蟲蟲機(jī)器人……電路城給你十個(gè)創(chuàng)意機(jī)器人陪你玩耍,一起去看看吧...
2021-07-21 07:31:24
機(jī)器人的定義是什么?機(jī)器人優(yōu)點(diǎn)和缺點(diǎn)是什么?機(jī)器人是由哪些部分組成的?工業(yè)機(jī)器人的應(yīng)用有哪些?
2021-07-05 06:48:21
機(jī)器人的移動(dòng)通常是從管理機(jī)器人總體任務(wù)進(jìn)度的中央處理器發(fā)出位置變化請(qǐng)求時(shí)開始的。導(dǎo)航系統(tǒng)通過(guò)制定行程計(jì)劃或軌跡以開始執(zhí)行位置變化請(qǐng)求。行程計(jì)劃需考慮可用路徑、已知障礙位置、機(jī)器人能力及任何相關(guān)的任務(wù)目標(biāo)。
2019-09-10 10:44:32
響應(yīng)市場(chǎng)要求,加強(qiáng)在國(guó)際市場(chǎng)的競(jìng)爭(zhēng)能力。 視覺(jué)是人類獲取信息最重要的來(lái)源。人看到一幅圖像,馬上能夠理解圖像的內(nèi)容和含義。然而,機(jī)器視覺(jué)并非易事。現(xiàn)有的機(jī)器人主要還是以壓力傳感器、位置傳感器等產(chǎn)業(yè)傳感器
2015-01-23 15:02:27
波士頓動(dòng)力創(chuàng)始人Marc Raibert 1986年的書,足式(腿式)機(jī)器人開山之作,研究集中在平衡和動(dòng)態(tài)控制的核心問(wèn)題上
2017-12-11 10:22:52
去年 1 月份,瑞士公司 ANYbotics 放出來(lái)一款靈活的四足機(jī)器人——ANYmal,它可以對(duì)抗各種惡劣的現(xiàn)實(shí)環(huán)境,適用于在危險(xiǎn)的工業(yè)場(chǎng)景中執(zhí)行任務(wù)。在最近的世界機(jī)器人大會(huì)上,ANYbotics
2021-12-31 06:28:53
本帖最后由 colorsky 于 2016-4-21 14:05 編輯
大家好,我是ColorSky。這是我的雙足機(jī)器人的開源項(xiàng)目。先發(fā)出視頻給大家看看,后面陸續(xù)會(huì)把技術(shù)資料上傳。機(jī)器人鞠躬?jiǎng)幼?b class="flag-6" style="color: red">機(jī)器人舞蹈1視頻機(jī)器人跳機(jī)器舞視頻
2016-04-21 10:51:28
摘要:經(jīng)過(guò)大一那次失敗之后,我決定暫時(shí)停止該項(xiàng)目的開發(fā),轉(zhuǎn)而先去學(xué)習(xí)那些有關(guān)嵌入式開發(fā)的基礎(chǔ)知識(shí),等以后有能力的時(shí)候再去獨(dú)立完成這個(gè)六足機(jī)器人。很幸運(yùn)的是在我大學(xué)本科即將結(jié)束的時(shí)候,我已掌...
2021-07-20 06:14:40
都很好理解,揮手功能包含wave2 和wave兩個(gè)函數(shù),可以讓機(jī)器人分別使用左前足和右前足揮手。waveAuto函數(shù)是機(jī)器人在自動(dòng)模式下?lián)]手,使用的是右前足。睡眠模式是指機(jī)器人將舵機(jī)的位置運(yùn)動(dòng)到讓機(jī)器人
2015-12-11 17:26:04
描述“邁爾斯”開源四足蜘蛛機(jī)器人它使用 8 個(gè) SG90 / MG90 伺服電機(jī) 作為腿部的執(zhí)行器,由一個(gè)定制的 PCB 組成,用于為伺服系統(tǒng)供電和控制,而 Arduino Nano.PCB 具有
2022-08-09 06:30:29
求大神指導(dǎo)怎么做多足機(jī)器人的行走的動(dòng)畫演示!!!
2017-04-23 11:36:56
用labview如何編寫六足機(jī)器人三足步態(tài)的程序?主要的依據(jù)和原理是什么呢?求指教!
2016-08-04 19:21:05
)仿生六足機(jī)器人開發(fā)流程以及細(xì)節(jié)仿生六足機(jī)器人三維模型簡(jiǎn)圖論文、D-H數(shù)學(xué)模型 、程序、硬件原理圖至附件下載
2014-03-27 18:51:05
★★★DIY6足仿生蜘蛛機(jī)器人 51單片機(jī) WIFI控制★★★網(wǎng)上的6足機(jī)器人都是用stm32或AVR單片機(jī)做的,可大多數(shù)單片機(jī)新手只會(huì)51單片機(jī),所以就試著用51單片機(jī)做個(gè),沒(méi)想到還真成了,做的好不好大家看看吧。第一版比較粗糙!湊合著看吧!上圖:等會(huì)上個(gè)視頻看看效果!
2016-04-15 15:54:33
項(xiàng)目名稱:基于外骨骼的仿生機(jī)器人控制系統(tǒng)試用計(jì)劃:1.申請(qǐng)理由本人為電子在專業(yè)在校學(xué)生,以智能機(jī)器人為研究方向,參加了許多區(qū)級(jí)國(guó)家級(jí)比賽并獲獎(jiǎng),想要借助發(fā)燒友的智能語(yǔ)音開發(fā)板進(jìn)行深入的學(xué)習(xí)和探索,并
2020-02-25 16:01:04
申請(qǐng)理由:關(guān)于六足機(jī)器人,基本上是用18個(gè)舵機(jī)一起使用來(lái)驅(qū)動(dòng)六足完成相應(yīng)的動(dòng)作組,而一般的89C52以及STC12系列的單片機(jī)只能讓六足機(jī)器人做簡(jiǎn)單的動(dòng)作,無(wú)法完成相應(yīng)的創(chuàng)新。所以能有一塊STM32
2015-11-25 15:35:26
申請(qǐng)理由:我是在校大學(xué)生,大三,在學(xué)校的創(chuàng)新團(tuán)隊(duì)搞研發(fā),今年5月份申請(qǐng)了省級(jí)項(xiàng)目---基于物聯(lián)網(wǎng)的六足爬行機(jī)器人,并且已經(jīng)審批通過(guò)了。正在設(shè)計(jì)制作此項(xiàng)目。我們發(fā)現(xiàn),現(xiàn)在的機(jī)器人都收到空間的局限性
2015-08-09 17:12:20
申請(qǐng)理由:項(xiàng)目描述: 現(xiàn)有一個(gè)六足機(jī)器人平臺(tái),但是沒(méi)有心儀的開發(fā)板來(lái)控制,之前有用過(guò)STM32F4的單片機(jī)。F412ZG的定時(shí)器豐富,IO口數(shù)量充足,具有各類通信外設(shè),十分適合做六足機(jī)器人的控制開發(fā)
2016-11-14 18:54:33
申請(qǐng)理由:手頭有個(gè)畢業(yè)設(shè)計(jì)是采用stm32的。。想試著換換主控。來(lái)作為六足機(jī)器人的主控板。。32雖然夠用。但是畢竟?fàn)€大街。。正好試試學(xué)著用用其它款單片機(jī)。項(xiàng)目描述:使用申請(qǐng)的開發(fā)板做主控。用
2015-07-17 16:53:26
申請(qǐng)理由:我正在做這樣一個(gè)機(jī)器人,遇到了很多問(wèn)題,非常想學(xué)習(xí)一下這款板子!我相信利用它能幫我解決難題!項(xiàng)目描述:可利用四足機(jī)械結(jié)構(gòu)仿生行進(jìn),也可利用車輪進(jìn)行行進(jìn),集四足機(jī)器人越障能力強(qiáng)和輪式機(jī)器人行動(dòng)迅速的特點(diǎn)于一身,具有良好的復(fù)雜環(huán)境地形適應(yīng)性,可用于災(zāi)區(qū)偵查、救援。
2015-06-25 19:38:19
申請(qǐng)理由:我是在校大學(xué)生,大三,在學(xué)校的創(chuàng)新團(tuán)隊(duì)搞研發(fā),今年5月份申請(qǐng)了省級(jí)項(xiàng)目---基于物聯(lián)網(wǎng)的六足爬行機(jī)器人,并且已經(jīng)審批通過(guò)了。正在設(shè)計(jì)制作此項(xiàng)目。我們發(fā)現(xiàn),現(xiàn)在的機(jī)器人都收到空間的局限性
2015-08-07 22:30:34
申請(qǐng)理由:我是在校大學(xué)生,大三,在學(xué)校的創(chuàng)新團(tuán)隊(duì)搞研發(fā),今年5月份申請(qǐng)了省級(jí)項(xiàng)目---基于物聯(lián)網(wǎng)的六足爬行機(jī)器人,并且已經(jīng)審批通過(guò)了。正在設(shè)計(jì)制作此項(xiàng)目。我們發(fā)現(xiàn),現(xiàn)在的機(jī)器人都收到空間的局限性
2015-09-09 17:03:59
項(xiàng)目名稱:浙江省大學(xué)生機(jī)器人競(jìng)賽試用計(jì)劃:1.設(shè)計(jì)機(jī)器人主控板,搭載各類功能模塊2.實(shí)現(xiàn)USB功能讀取USB攝像頭數(shù)據(jù)3.應(yīng)用舵機(jī)控制板pca9685實(shí)現(xiàn)舵機(jī)控制4.與尋跡模塊板進(jìn)行通信,步進(jìn)電機(jī)
2019-04-09 16:19:06
4實(shí)物機(jī)器人的結(jié)果在本章中,我將展示一下我(和我的同事)對(duì)實(shí)物機(jī)器人測(cè)試獲得的結(jié)果。由于實(shí)驗(yàn)時(shí)間有限,我們?cè)跊](méi)有添加UKF的情況下實(shí)現(xiàn)了第三章中提出的控制系統(tǒng)。對(duì)控制器(主要是身體電機(jī)的PD調(diào)節(jié)器
2021-08-30 06:18:33
傳感器。四足機(jī)器人重2.2kg,有8個(gè)自由度,四條腿上都搭配了足底傳感器。其他零件由3D打印和現(xiàn)成的零件構(gòu)成,可以做出重量輕且低成本的機(jī)器人,這也使得其他研究團(tuán)隊(duì)可以快速開發(fā)和復(fù)制此項(xiàng)目。本文系統(tǒng)地描述了
2021-09-13 06:33:53
【畢設(shè)】六足機(jī)器人的設(shè)計(jì)序這個(gè)項(xiàng)目是我本科畢業(yè)設(shè)計(jì)作品,可實(shí)現(xiàn)功能有常規(guī)控制(前后左右移動(dòng)、左右自旋)、保持自平衡、三檔變速及自主避障功能,歷時(shí)三個(gè)月在家獨(dú)立完成。應(yīng)各位的請(qǐng)求寫一篇項(xiàng)目技術(shù)總結(jié)
2021-08-18 07:05:57
`(不太會(huì)用論壇的發(fā)帖來(lái)編輯,圖片的位置都在最后面,附件里有技術(shù)報(bào)告)一、項(xiàng)目設(shè)計(jì)背景及概述雙足步行機(jī)器人是機(jī)器人研究領(lǐng)域的熱點(diǎn),它集機(jī)械、電子、計(jì)算機(jī)、仿生學(xué)、自動(dòng)控制、多傳感器及人工智能等多門
2014-01-02 14:31:52
PAGE\* MERGEFORMATPAGE\* MERGEFORMAT 1信息技術(shù)(六年級(jí))智能機(jī)器人課題一、你好機(jī)器人——機(jī)器人常識(shí)目標(biāo)1、認(rèn)識(shí)機(jī)器人并了解機(jī)器人的發(fā)展與未來(lái)。2、了解機(jī)器人仿真
2021-09-01 06:17:46
什么是機(jī)器人控制系統(tǒng)?機(jī)器人的運(yùn)動(dòng)控制系統(tǒng)包含哪些方面?機(jī)器人控制系統(tǒng)的基本功能有哪些?
2021-10-11 09:38:12
龍人四足機(jī)器人是一種仿生機(jī)器人,由Openduino控制板控制,有四條腿,每條腿兩個(gè)自由度,由兩個(gè)舵機(jī)驅(qū)動(dòng),能實(shí)現(xiàn)兩種步態(tài)行走。配有三個(gè)超聲波,實(shí)現(xiàn)大角度智能避障。標(biāo)準(zhǔn)演示程序有5個(gè)可愛(ài)的表演動(dòng)作。重要技術(shù)點(diǎn): 四足機(jī)器人的行走步態(tài)設(shè)計(jì)、舵機(jī)的梯形速度控制、多路舵機(jī)的協(xié)調(diào)控制
2016-03-24 16:17:53
工業(yè)機(jī)器人的四大特征是哪些?工業(yè)機(jī)器人是由哪些部分組成的?工業(yè)機(jī)器人是怎樣進(jìn)行劃分的?
2021-10-11 09:10:17
作者:pcbguy1.項(xiàng)目簡(jiǎn)介 本項(xiàng)目中,履足式復(fù)合機(jī)器人擁有兩種行進(jìn)模式:四足行進(jìn)模式、履帶行進(jìn)模式,應(yīng)對(duì)不同場(chǎng)景及地形時(shí)能夠切換形態(tài)。四足形態(tài)下整體總共擁有8個(gè)自由度DOF,單腿各具備2個(gè)自由度
2022-06-09 11:37:54
`>控制的話是遙控嗎,如果遠(yuǎn)程控制的話,應(yīng)該在機(jī)器人上加上攝像頭?>總覺(jué)得制作出來(lái)六足,實(shí)際用處并不大?>如果要制作需要用那種芯片做為驅(qū)動(dòng)?`
2017-03-11 18:06:05
`華南機(jī)器人應(yīng)用培訓(xùn)中心擁有各種設(shè)備,開展各種不同的機(jī)器人培訓(xùn)班。打造各種工業(yè)現(xiàn)場(chǎng)常見的機(jī)器人工作站,現(xiàn)開展KUKA、發(fā)那科、三菱、ABB、愛(ài)普生工業(yè)機(jī)器人培訓(xùn)對(duì)外招生。 一、認(rèn)識(shí)機(jī)器人技術(shù):工業(yè)
2015-09-02 14:03:18
`剛開始做機(jī)器人,實(shí)物圖`
2013-11-25 11:36:20
第三章、雙足機(jī)器人的硬件結(jié)構(gòu)與框圖一、雙足機(jī)器人的硬件框圖圖1. 雙足機(jī)器人結(jié)構(gòu)框圖
2013-11-25 11:30:18
`大自然是最優(yōu)秀的設(shè)計(jì)師。工程師們從大自然學(xué)習(xí)經(jīng)驗(yàn),將其運(yùn)用在工程上,這就是仿生學(xué)。仿動(dòng)物的機(jī)器人能幫助研究者理解動(dòng)物的運(yùn)動(dòng)和進(jìn)化,以及為什么它們能完成如此驚人的任務(wù)。除此之外,仿生機(jī)器人還有
2016-08-24 10:33:05
本帖最后由 紅塵。破 于 2016-8-19 14:59 編輯
今天整理資料時(shí)發(fā)現(xiàn)了一年前做的四足仿生機(jī)器人,當(dāng)時(shí)買了一個(gè)四足仿生機(jī)器人的骨架,畫了個(gè)板子,寫了個(gè)測(cè)試代碼,能完成簡(jiǎn)單的行走,后面加了避障、顯示功能啥的,不過(guò)視頻資料沒(méi)了,只有簡(jiǎn)單行走的視頻,優(yōu)酷鏈接在下面評(píng)論
2016-08-19 14:59:33
`這是創(chuàng)客集結(jié)號(hào)的作品四足機(jī)器人身體和四足都是通過(guò)3D打印技術(shù)打印出來(lái)的,通過(guò)自己安裝連接上超聲波傳感器,制作成功的四足機(jī)器人完全就很了。`
2018-09-29 09:55:09
四足機(jī)器人屬于復(fù)雜機(jī)電系統(tǒng),需要綜合生物、機(jī)械、電子、控制等學(xué)科內(nèi)容,具體涉及仿生機(jī)構(gòu)設(shè)計(jì)、靈巧運(yùn)動(dòng)機(jī)構(gòu)設(shè)計(jì)、高性能驅(qū)動(dòng)器制造,行走穩(wěn)定性控制、強(qiáng)化學(xué)習(xí)等在內(nèi)的多個(gè)研究方向。其中,機(jī)構(gòu)設(shè)計(jì)是保障四足
2021-09-15 06:54:01
本帖最后由 eehome 于 2013-1-5 10:08 編輯
四足步行機(jī)器人的彎道行走
2012-08-12 09:53:57
仿生機(jī)器蟹控制系統(tǒng)需要較高的控制精度和運(yùn)算速度,以便在機(jī)械結(jié)構(gòu)剛度較高的情況下,通過(guò)提高響應(yīng)速度來(lái)確保機(jī)器人的正常行走和姿態(tài)控制。由于在機(jī)器蟹腿節(jié)和脛節(jié)置有兩個(gè)電機(jī)(如圖1所示),使其質(zhì)量較大,同時(shí)
2019-07-26 08:25:28
通過(guò)安芯一號(hào)控制雙足機(jī)器人腿部關(guān)節(jié)六個(gè)舵機(jī)的角度以及轉(zhuǎn)動(dòng)角速度,使機(jī)器人完成行走,翻滾,原地360等動(dòng)作。機(jī)器人在規(guī)定區(qū)域內(nèi)向前走,通過(guò)傳感器找到動(dòng)作區(qū),完成一系列動(dòng)作;并且可以通過(guò)串口與PC機(jī)時(shí)時(shí)通信,傳回機(jī)器人的參數(shù)
2013-09-28 18:58:35
如何完整的組裝四足機(jī)器人?
2021-09-24 07:00:54
手?jǐn)]六足機(jī)器人(三)----------確定控制方式“搖桿模塊+LCD屏幕顯示+藍(lán)牙通訊”及源碼示例[STM32實(shí)現(xiàn)]關(guān)于這一塊,本來(lái)是想用0.96寸的OLED實(shí)現(xiàn)的(小巧便宜),可惜快遞停運(yùn)。手頭
2022-03-02 06:32:31
遠(yuǎn)程操控仿生機(jī)械手抓取實(shí)物。仿生機(jī)械手控制系統(tǒng)硬件設(shè)計(jì)仿生機(jī)械手控制系統(tǒng)硬件設(shè)計(jì)圖數(shù)據(jù)手套軟件控制設(shè)計(jì) ...
2022-01-07 06:55:18
機(jī)器人技術(shù)是綜合了計(jì)算機(jī)、控制論、機(jī)構(gòu)學(xué)、信息和傳感技術(shù)、人工智能、仿生學(xué)等多學(xué)科而形成的高新技術(shù),是當(dāng)代研究十分活躍,應(yīng)用日益廣泛的領(lǐng)域。機(jī)器人應(yīng)用情況,是一個(gè)國(guó)家工業(yè)自動(dòng)化水平的重要標(biāo)志。
2020-03-27 09:03:30
有很多小伙伴喜歡在沒(méi)事的時(shí)候鼓搗一些機(jī)器人什么的,現(xiàn)在給大家分享一個(gè)仿生機(jī)器人開源資料,喜歡的小伙伴可以看看。六足機(jī)器人系統(tǒng)基于仿生學(xué)原理,采用六足昆蟲的機(jī)械結(jié)構(gòu),通過(guò)控制18個(gè)舵機(jī),采用三角步態(tài)
2020-10-10 09:57:11
怎么實(shí)現(xiàn)六足機(jī)器人的設(shè)計(jì)?
2021-11-22 08:02:22
基于STC15/LPC845的四足機(jī)器人是由哪些部分組成的?怎樣去制作一款基于STC15/LPC845的四足機(jī)器人?
2021-09-26 08:46:16
關(guān)于ros智能機(jī)器人,就是一個(gè)寫智能機(jī)器人代碼的一個(gè)虛擬機(jī),
2021-10-13 19:20:16
機(jī)械昆蟲-六足爬行機(jī)器人
2014-08-30 15:38:26
`業(yè)余,想想做一做六足機(jī)器人。但是苦于無(wú)大致圖紙,卡在建模的問(wèn)題上。求六足機(jī)器人的圖紙,有清晰的尺寸就行(主要是腿)。`
2019-03-26 18:43:17
求契貝謝夫四足機(jī)器人的各部件尺寸
2013-11-27 15:42:51
瑞士聯(lián)邦理工學(xué)院 Pascal Buholzer 和他的學(xué)生設(shè)計(jì)的Sepios水下仿生機(jī)器人,解決螺旋槳推進(jìn)器的水草纏繞和噪音問(wèn)題。
2015-01-13 15:52:06
紅外遙控六足爬蟲機(jī)器人設(shè)計(jì)
2013-02-19 16:38:25
紅外遙控六足爬行機(jī)器人設(shè)計(jì)
2013-01-28 15:12:22
`博雅工道研發(fā)了一款智能仿生機(jī)器魚,該魚使用仿生技術(shù),以盒子魚為原型加以創(chuàng)造具有目標(biāo)識(shí)別、智能跟隨、水聲遙控、代碼開源、防水技術(shù)、無(wú)線傳輸、智能存儲(chǔ)、PC端調(diào)試平臺(tái)等功能。應(yīng)用于競(jìng)賽、科研、教育創(chuàng)新`
2017-10-25 18:00:18
本人新手,最近在準(zhǔn)備制作一個(gè)六足機(jī)器人,如果利用舵機(jī)控制器+遙控手柄套件的話,可以很容易就實(shí)現(xiàn)簡(jiǎn)單的功能。為了能讓六足機(jī)器人實(shí)現(xiàn)更加復(fù)雜的功能,我想利用arduino+樹莓派+舵機(jī)控制器的方式。這樣
2015-11-10 15:33:17
的Arduino來(lái)編程。所有這些功能讓蟲蟲的行走更加復(fù)雜,互動(dòng)更加豐富。可以實(shí)現(xiàn)前進(jìn)、后退、避障拐彎、巡光等功能。簡(jiǎn)單的組裝讓你了解最基本的機(jī)器人原理和智能控制。喜歡DIY的用戶,還可以在原有代碼的基礎(chǔ)上改造出自己的互動(dòng)模式。所以,其實(shí)打造一款機(jī)器人并沒(méi)有那么難啦。六足蟲蟲機(jī)器人實(shí)物展示:
2016-08-02 14:43:18
我是新人,求幫助啊,明天需要提交輪式機(jī)器人應(yīng)用的報(bào)告,求大神給點(diǎn)建議,可用輪式機(jī)器人應(yīng)用于那些方面,要求實(shí)際可行,應(yīng)用于生活,農(nóng)業(yè),軍事都可以,謝謝啦
2013-04-17 16:32:16
通過(guò)視覺(jué)傳感器獲取互動(dòng)表演者的手臂姿態(tài),揮動(dòng)雙手臂模仿表演者的動(dòng)作,實(shí)現(xiàn)對(duì)機(jī)器人的仿生模擬控制。邯鄲學(xué)舞機(jī)器人由一個(gè)視覺(jué)傳感器、兩個(gè)三自由度手臂、機(jī)器人身體和視覺(jué)處理控制器等組成;該機(jī)器人通過(guò)視覺(jué)傳感器獲取互動(dòng)表演者的手臂姿態(tài),揮動(dòng)雙手臂模仿表演者的動(dòng)作,實(shí)現(xiàn)對(duì)機(jī)器人的仿生模擬控制。
2016-03-28 11:42:25
龍人六足機(jī)器人是有六條腿的仿生機(jī)器人,每條腿有兩個(gè)自由度,由兩個(gè)角度舵機(jī)控制。控制器采用Stm32機(jī)器人控制器,通過(guò)編程控制實(shí)現(xiàn)12個(gè)電機(jī)協(xié)調(diào)的控制行走,實(shí)現(xiàn)對(duì)六足昆蟲的仿生模擬。頭部有三個(gè)超聲波,實(shí)現(xiàn)大角度范圍的避障。重要技術(shù)點(diǎn):六條腿協(xié)調(diào)前進(jìn) 、后退、轉(zhuǎn)彎的算法,超聲波導(dǎo)航和避障
2016-03-23 17:49:48
龍人六足機(jī)器人龍人六足機(jī)器人是有六條腿的仿生機(jī)器人,每條腿有兩個(gè)自由度,由兩個(gè)角度舵機(jī)控制。控制器采用Stm32機(jī)器人控制器,通過(guò)編程控制實(shí)現(xiàn)12個(gè)電機(jī)協(xié)調(diào)的控制行走,實(shí)現(xiàn)對(duì)六足昆蟲的仿生模擬。頭部有三個(gè)超聲波,實(shí)現(xiàn)大角度范圍的避障。重要技術(shù)點(diǎn):六條腿協(xié)調(diào)前進(jìn)、后退、轉(zhuǎn)彎的算法,超聲波導(dǎo)航和避障
2016-03-24 16:25:46
HM16六軸協(xié)作機(jī)器人可以自動(dòng)處理重達(dá)16公斤以上的任務(wù)并且不會(huì)降低精確度,它是目前海默協(xié)作機(jī)器人系列中負(fù)載最大的機(jī)器人。工作半徑達(dá)到1010mm,因此它可以在不同操作區(qū)域之間距離較大的設(shè)施中執(zhí)行
2021-12-24 14:27:10
下肢外骨骼康復(fù)機(jī)器人BEAR-A1利用仿生學(xué)、人體工學(xué)、機(jī)器人技術(shù),為下肢運(yùn)動(dòng)功能障礙者提供康復(fù)訓(xùn)練。通過(guò)對(duì)患者髖、膝關(guān)節(jié)提供助力完成康復(fù)訓(xùn)練,可以有效降低治療師工作強(qiáng)度,提高康復(fù)訓(xùn)練效率,提高患者
2023-09-20 17:31:33
盤點(diǎn)德國(guó)仿生機(jī)器人,絕對(duì)讓你佩服得五體投地!
2018-01-02 10:52:52 9706
9706 隨著對(duì)于仿生機(jī)器人認(rèn)識(shí)的不斷深化,人們對(duì)其的研究也走向了“第四階段”:即構(gòu)建結(jié)構(gòu)與生物特征一體化的類生命系統(tǒng),強(qiáng)調(diào)仿生機(jī)器人不僅具有生物的形態(tài)特征和運(yùn)動(dòng)方式,同時(shí)具備生物的自我感知、自我控制等性能特性,更接近生物原型。目前大熱仿生腦和仿生神經(jīng)也屬于此類方向。
2018-07-06 15:44:002714 利用ADAMS軟件虛擬樣機(jī)技術(shù),設(shè)計(jì)了液壓驅(qū)動(dòng)的四足仿生機(jī)器人單腿機(jī)械結(jié)構(gòu)。通過(guò)分析四足哺乳類動(dòng)物身體結(jié)構(gòu)及運(yùn)動(dòng)特性,設(shè)計(jì)了仿生機(jī)器人的機(jī)械機(jī)構(gòu),確定了機(jī)器人腿部自由度配置,建立了仿真模型。根據(jù)動(dòng)物
2018-03-01 11:41:12 3
3 德國(guó)自動(dòng)化技術(shù)廠商Festo(費(fèi)斯托)推出來(lái)自其仿生學(xué)習(xí)網(wǎng)絡(luò) (Bionic Learning Network)最新成果的仿生機(jī)器人,BionicWheelBot是一款獨(dú)具特色的行走機(jī)器人,以摩洛哥后翻蜘蛛為靈感,能夠模仿摩洛哥后翻蜘蛛以翻滾模式在復(fù)雜地形上移動(dòng)。
2018-03-31 10:08:189722 近日,據(jù)外媒報(bào)道,德國(guó)自動(dòng)化技術(shù)廠商Festo推出來(lái)自其仿生學(xué)習(xí)網(wǎng)絡(luò)最新成果的兩款仿生機(jī)器人,一款可以翻滾的蜘蛛機(jī)器人BionicWheelBot和一款飛狐機(jī)器人BionicFlyingFox
2018-04-08 07:08:002674 如果20年后科技發(fā)展迅速,機(jī)器仿生人出現(xiàn)了,你會(huì)不會(huì)也想購(gòu)買一臺(tái)?是否想過(guò)新時(shí)代會(huì)因仿生機(jī)器人的出現(xiàn)而有何轉(zhuǎn)變?
2018-08-15 17:34:155709 在YouTube上點(diǎn)擊量超高的波士頓動(dòng)力公司,預(yù)計(jì)將會(huì)在2019年推出結(jié)構(gòu)復(fù)雜的仿生機(jī)器人。消息一出,人們目光即被拉向了機(jī)器人領(lǐng)域一大分支——仿生機(jī)器人。
2018-09-28 14:48:165007 仿生機(jī)器人就是模仿自然界中生物的外部形狀、運(yùn)動(dòng)原理和行為方式的系統(tǒng),能從事生物特點(diǎn)工作的機(jī)器人。主要的仿生機(jī)器人包括三大類:一是仿人機(jī)器人,二是仿生物機(jī)器人,三是生物機(jī)器人。
2018-12-23 16:19:4811259 韓國(guó)國(guó)防部日前宣布將研發(fā)軍用仿生機(jī)器人,提升防御與偵察能力,強(qiáng)化武裝部隊(duì)。
2019-06-07 14:44:002552 據(jù)報(bào)道,韓國(guó)國(guó)防部日前宣布將研發(fā)軍用仿生機(jī)器人,以提升防御與偵察能力,增強(qiáng)武裝部隊(duì)的戰(zhàn)斗力水平。預(yù)計(jì)這類仿生機(jī)器人將于2024年進(jìn)入到韓國(guó)軍隊(duì)服役。
2019-06-10 09:36:272875 這是目前國(guó)內(nèi)研發(fā)生產(chǎn)的第一臺(tái)5G動(dòng)作傳感仿生機(jī)器人。它使用新型芯片,將三維空間動(dòng)態(tài)控制、平衡原理與先進(jìn)的機(jī)械設(shè)計(jì)和尖端電子感知技術(shù)相結(jié)合,來(lái)操縱機(jī)器人。
2019-07-22 09:32:153844 “仿生機(jī)器人”是指模仿生物、從事生物特點(diǎn)工作的機(jī)器人。同時(shí)關(guān)于動(dòng)物如何移動(dòng)、處理危險(xiǎn)和保存能量的特別見解和觀察不僅有趣,而且對(duì)機(jī)器人領(lǐng)域的科學(xué)家也很有價(jià)值。在德國(guó)漢堡舉行的IROS年會(huì)上,類似動(dòng)物的機(jī)器人運(yùn)動(dòng)做出了這樣的貢獻(xiàn)。
2020-03-05 09:26:313926 相信我們不少人都聽說(shuō)過(guò)仿生機(jī)器人,這一產(chǎn)品被稱為我們?nèi)祟惖暮门笥选D悄壳八陌l(fā)展如何呢?
2020-11-10 09:33:477136 11月27日消息,據(jù)天眼查公開信息顯示,近日,京東數(shù)科海益信息科技有限公司新增多條仿生機(jī)器人相關(guān)專利信息。專利名稱為關(guān)節(jié)連接組件、仿生手及仿生機(jī)器人;手指外骨骼單元和手套外骨骼;便攜式生物識(shí)別裝置
2020-11-27 16:04:161779 近日,京東數(shù)科海益信息科技有限公司新增多條“仿生機(jī)器人”的相關(guān)專利信息。該專利名為關(guān)節(jié)連接組件、仿生手以及仿生機(jī)器人;手指外骨骼單元手套外骨骼。
2020-12-06 09:01:002527 按照使用環(huán)境的不同,又可以將機(jī)器人分為水下仿生機(jī)器人,空中仿生機(jī)器人和地面仿生機(jī)器人。
2020-12-14 16:10:0711853 仿生機(jī)器人索菲亞于2016年公開亮相之后,就在美國(guó)走紅。據(jù)《Metro》新聞網(wǎng)1月25日?qǐng)?bào)道,如今制造索菲亞的機(jī)器人公司又開始了新的征程,計(jì)劃在年底前量產(chǎn)機(jī)器人。
2021-01-29 10:02:522163 雷軍展示全尺寸人形仿生機(jī)器人 美好即將發(fā)生 小米十二周年之際小米創(chuàng)始人、CEO雷軍進(jìn)行了2022年的重磅年度演講,雷軍展示全尺寸人形仿生機(jī)器人;特別讓人驚喜的One More Thing:小米
2022-08-12 20:37:091083 
 電子發(fā)燒友App
電子發(fā)燒友App




















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論