 電子發(fā)燒友App
電子發(fā)燒友App


?
一、前言
??? 本文結(jié)合多功能自動平衡護理床模型和組成特點,基于SolidWorks三維參數(shù)化設(shè)計流程,對其參數(shù)化設(shè)計、裝配與運動仿真、工作空間分析及運動學(xué)分析等方面進行深入剖析。文中完全摒棄偏重參數(shù)化設(shè)計思想,而是以多功能護理床的實際問題為核心,該方案也適用于其他類似醫(yī)療護理設(shè)備的研發(fā)。
本文將對多功能自動調(diào)平衡護理床設(shè)計過程中的一些關(guān)鍵問題進行闡述,而對于目前相關(guān)文獻集中介紹的參數(shù)化建模等方面的內(nèi)容則不再贅述。
二、SolidWorks三維設(shè)計流程
目前關(guān)于 SolidWorks 在醫(yī)療床、護理床設(shè)計方面的文章較多,大多集中在零件建模、虛擬裝配、運動仿真與零件的有限元分析等方面,只突出了SolidWorks軟件的特點,或者是某個護理床的局部功能,尚未有以多功能護理床設(shè)計為核心的系統(tǒng)性研究。SolidWorks只是一種工具,而工具必須服務(wù)于設(shè)計對象,這也是我們在設(shè)計過程中強調(diào)的一點。
計與運動學(xué)分析")
圖1是在SolidWorks中進行三維設(shè)計的技術(shù)流程圖,這個流程主體是一個并行設(shè)計的過程。在此過程中,首先確定設(shè)計方案,隨后進行三維造型與建模,且主要集中在零件建模方面。建模完成后進行裝配,并進行靜態(tài)干涉分析與局部修改。當確認方案后,進行運動仿真分析,對運動過程中出現(xiàn)的動態(tài)干涉情況進行修改。確認基本尺寸后,可對關(guān)鍵零部件進行有限元分析,確定其力學(xué)特性是否滿足工作要求,并在此基礎(chǔ)上進行結(jié)構(gòu)優(yōu)化。優(yōu)化后需重新進行有限元分析,直到確定最終方案。二維出圖和加工則為一些后續(xù)工作,在此略過。
三、產(chǎn)品模型分析和功能簡介
多功能自動平衡護理床的總體方案如圖2所示,由床身、固定支撐桿、伺服液壓缸、電動缸、行走底架和控制系統(tǒng)等 部分構(gòu)成。
1.自動調(diào)平衡系統(tǒng)的結(jié)構(gòu)組成及功能
計與運動學(xué)分析")
由圖2可見,平臺的上表面,即平臺的穩(wěn)定面由4個球鉸支撐。對兩自由度平臺,固定桿3與底架固定連接,電液伺服缸4、5 關(guān)于桿3對稱、與底架鉸鏈連接,三者在一條直線上。液壓伺服缸9與桿3在一條中線上,與底架也是鉸鏈連接。平臺在三個伺服缸的控制下,可做繞通過固定支撐點水平軸的俯仰運動和繞固定支撐點與約束支撐點縱軸的搖擺運動,以達到底板搖晃時穩(wěn)定面保持水平之目的。
2.體位調(diào)整功能
按照人機工程學(xué)的原理,將床身分成背板1、座板2和腿板6三部分,背板和座板通過軸鉸接,通過控制電動缸的伸縮可實現(xiàn)0°~85°背位調(diào)整,同理可實現(xiàn)腿板的角度調(diào)整。這樣就實現(xiàn)了床身坐姿與臥姿間的連續(xù)體位調(diào)整功能, 如圖3所示。
計與運動學(xué)分析")
3.床身直立功能
整床的支撐桿系主要由固定桿3和電液伺服缸9兩部分組成,控制電液伺服缸9的伸縮量使床體繞固定桿3的球鉸轉(zhuǎn)動,從而實現(xiàn)床身在0°~80°范圍內(nèi)的角度調(diào)整。
四、模型裝配設(shè)計中的關(guān)鍵問題
在三維建模中,多功能護理床基本是標準的模型構(gòu)建,在復(fù)雜曲面方面應(yīng)用較少。需要考慮的問題包括參數(shù)化設(shè)計與處理、工業(yè)造型與整體處理和零件系列化的問題。
1.參數(shù)化問題
在護理床的設(shè)計中,參數(shù)化主要體現(xiàn)在兩個方面,即零件建模與裝配。對于零件建模而言,參數(shù)可分為三類:
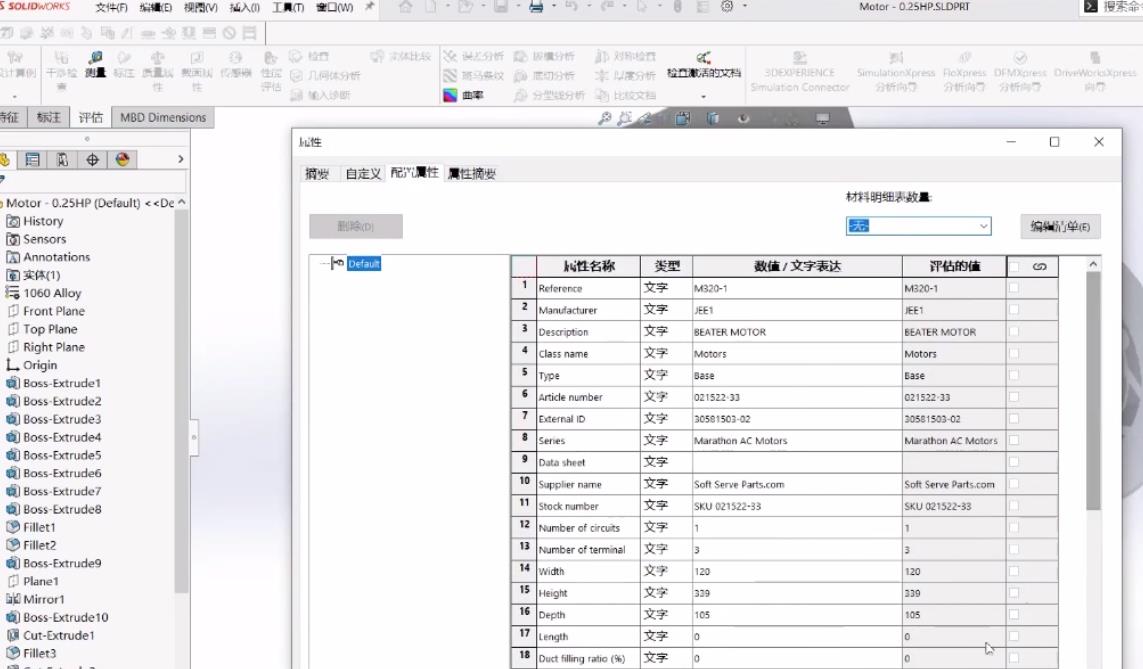
(1)相互之間存在一定約束條件,不可隨意更改參數(shù),如電動機的外形尺寸參數(shù)就是如此,必須通過查閱相關(guān)技術(shù)參數(shù)得到。
(2)查閱相關(guān)手冊取得,但是可以根據(jù)實際情況修改。
(3)根據(jù)具體情況自行確定。
在零件設(shè)計過程中,應(yīng)該采用參數(shù)化草圖建模方法。首先根據(jù)設(shè)計要求完成較為理想的結(jié)構(gòu)形狀,然后對每一條曲線賦予尺寸約束或幾何約束,使曲線按照設(shè)計者的意圖更新交換,生成參數(shù)化特征。其中,草圖實現(xiàn)全約束繪制較為容易,實體建模則需要考慮到布爾運算的影響。通過這種建模方式,可以方便地實現(xiàn)零件的修改及變形設(shè)計,生成其他類似零件無需重新建模,這可顯著提高設(shè)計效率。
在裝配過程中,很多零件之間存在繼承及約束關(guān)系,如液壓缸活塞頭部鉸接孔內(nèi)徑計與運動學(xué)分析") 等于安裝銷的外徑
等于安裝銷的外徑計與運動學(xué)分析") 。當
。當計與運動學(xué)分析") 改變時,
改變時,計與運動學(xué)分析") 也隨之改變,通過表達式建立二者之間的相等關(guān)系。同時,由于二者在裝配過程中要求有匹配、對齊等約束關(guān)系,當某個零件位置尺寸發(fā)生變化時,也可以通過這種定位關(guān)系自動更改配合零件的位置,這樣就保證了零件之間約束關(guān)系的一致性,便于產(chǎn)品設(shè)計與參數(shù)修改,或者以此為模板進行系列化產(chǎn)品的參數(shù)化設(shè)計。
也隨之改變,通過表達式建立二者之間的相等關(guān)系。同時,由于二者在裝配過程中要求有匹配、對齊等約束關(guān)系,當某個零件位置尺寸發(fā)生變化時,也可以通過這種定位關(guān)系自動更改配合零件的位置,這樣就保證了零件之間約束關(guān)系的一致性,便于產(chǎn)品設(shè)計與參數(shù)修改,或者以此為模板進行系列化產(chǎn)品的參數(shù)化設(shè)計。
2.零件系列化問題
在護理床設(shè)計中,參數(shù)化建模非常重要,但并不是所有的零件每次都需要經(jīng)歷參數(shù)化設(shè)計過程,而是可以建立零件庫。在SolidWorks中,對于通用標準件(如螺栓等),建議直接建庫并調(diào)用即可。對于廠標系列化零件(如推力軸承),它們外形和結(jié)構(gòu)都相似,但幾何尺寸和部分次要特征有差異。此時可以首先建立一個零件模板,將其要更改的重要尺寸列入到SolidWorks提供的表格中,這樣就形成了零件族。當需要調(diào)用時,在表格中直接更改這些尺寸則可以生成新的部件,從而縮短設(shè)計與裝配時間。
3.工業(yè)造型與整體設(shè)計
在國外,工業(yè)造型是一切設(shè)計工作的開始,在策劃中將其與總體設(shè)計結(jié)合在一起。在護理床設(shè)計中,與工業(yè)造型密切相關(guān)的就是床身的設(shè)計和渲染處理。床身的設(shè)計不但要考慮人機環(huán)境,而且要考慮材料選用和流線設(shè)計,這里采用SolidWorks的曲面造型功能完成床身設(shè)計。另外,三維實體模型建立后,還需要通過高級渲染制作出具有真實感的護理床產(chǎn)品和部件效果圖,一個好的渲染會對產(chǎn)品的推廣帶來良好的效果。
五、裝配與運動仿真的結(jié)構(gòu)驗證
1.裝配中的關(guān)鍵問題
這里所說的裝配是指靜態(tài)裝配,在此不再介紹其裝配過程,在實際設(shè)計中需要解決的問題如下。
(1)裝配模式。在多功能護理床的裝配中,采用Top-down或者Down-top方式都可以,二者并不對立,實際上它們是一個并行過程,經(jīng)常混用。
(2)干涉檢查。對于護理床而言,在各個部件中,都必須進行零件干涉分析,以避免在試生產(chǎn)中發(fā)生干涉碰撞。由于該機器產(chǎn)品復(fù)雜、零件數(shù)量多,不可能通過反復(fù)生產(chǎn)樣機解決問題,而需要在設(shè)計階段就盡量減少這種錯誤。SolidWorks裝配模塊中的干涉功能可以解決整機的靜態(tài)干涉分析,如推力軸承與軸承環(huán)之間,這是目前常采用的方式。
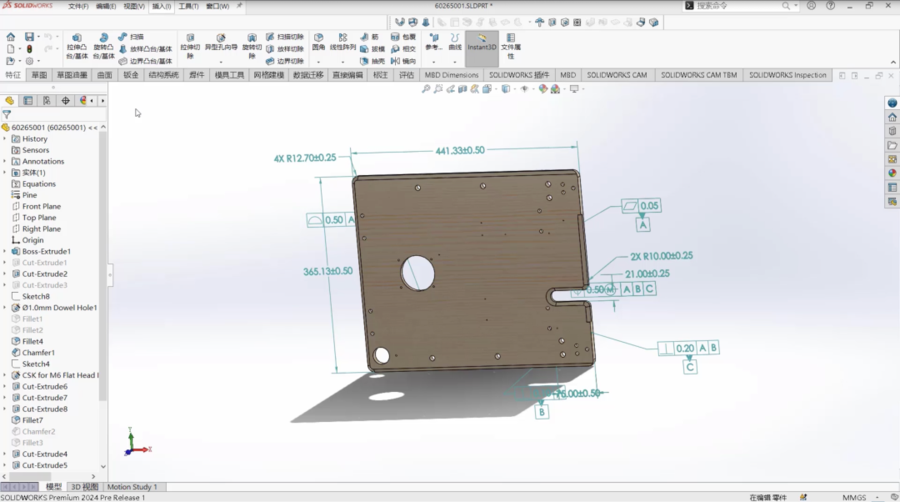
(3)公差問題。靜態(tài)裝配的三維模型都是處于理想狀態(tài)下,也就是無公差模型,這在實際工作環(huán)境中參考價值不大,因為加工出來的零件都是帶有偏差的。因此,還需要考慮不同公差情況對零件裝配的影響。相比之下,干涉檢查只是檢查理想尺寸與碰撞情況。
采用SolidWorks模塊對零件和裝配的全過程進行公差分析與綜合,從而分析零件公差對產(chǎn)品精度造成的影響,以及裝配模型是否符合精度要求。確定影響裝配關(guān)系和裝配精度的關(guān)鍵尺寸公差的約束及其敏感度,通過改變個別關(guān)鍵尺寸的公差約束降低制造成本。在滿足產(chǎn)品精度、性能和技術(shù)指標要求的前提下放寬公差指標,使尺寸在較寬松的公差范圍內(nèi)滿足產(chǎn)品的預(yù)期精度要求,降低制造成本。
2.運動仿真
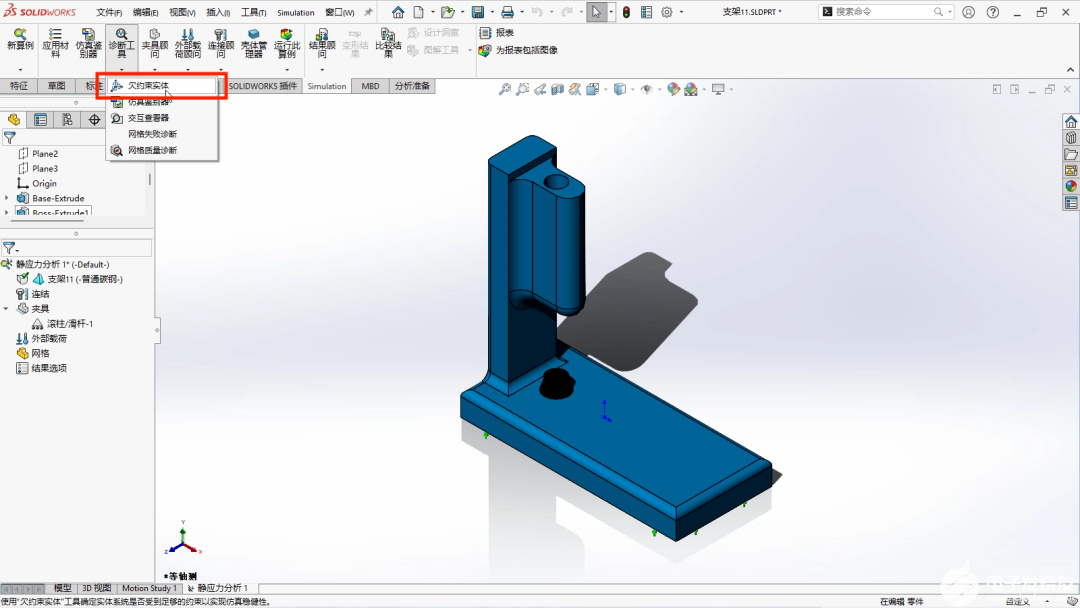
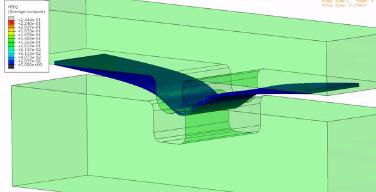
對于運動仿真而言,作用有兩個:即動態(tài)干涉分析和分析運動規(guī)律。SolidWorks中的Simulation模塊可以進行運動仿真分析(圖4),從而觀察在運動過程中構(gòu)件之間的干涉關(guān)系,如液壓缸與床身之間可能發(fā)生的碰撞干涉。在運動分析中,可以通過位移、速度及加速度曲線觀察運動規(guī)律是否符合設(shè)計要求,如圖5所示。
計與運動學(xué)分析")
計與運動學(xué)分析")
六、工作空間分析
機器人的工作空間是機器人操作器的工作區(qū)域,它是衡量機器人性能的重要指標。根據(jù)操作器工作時的位姿特點,工作空間又可分為可達工作空間和靈活工作空間。可達工作空間是指操作器上某一參考點可以到達的所有點的集合,這種工作空間不考慮操作器的姿勢。靈活工作空間是指操作器上某一參考點可以從任何方向到達的點的集合。
1.影響護理床平臺工作空間的因素
(1)桿長的限制。桿件長度變化時受到其結(jié)構(gòu)的限制,每一根桿件的長度計與運動學(xué)分析") 必須滿足:
必須滿足:計與運動學(xué)分析") ,其中
,其中計與運動學(xué)分析") 和
和計與運動學(xué)分析") 分別表示第i桿的最短值和最長值。當某桿長度達到其極限值時,運動平臺上的參考點也就達到了工作空間的邊界。
分別表示第i桿的最短值和最長值。當某桿長度達到其極限值時,運動平臺上的參考點也就達到了工作空間的邊界。
(2)轉(zhuǎn)動副轉(zhuǎn)角的限制。各種鉸鏈,包括球鉸鏈和萬向鉸鏈的轉(zhuǎn)角都會受到結(jié)構(gòu)限制,每一鉸鏈的轉(zhuǎn)角計與運動學(xué)分析") ,其中
,其中計與運動學(xué)分析") 是第i個鉸鏈的球面副和萬向鉸鏈的最大轉(zhuǎn)角,其大小由運動副的具體結(jié)構(gòu)確定。
是第i個鉸鏈的球面副和萬向鉸鏈的最大轉(zhuǎn)角,其大小由運動副的具體結(jié)構(gòu)確定。
(3)桿件的尺寸干涉。連接動平臺和固定平臺的桿件都具有幾何尺寸,因此各桿件之間在運動過程中可能發(fā)生相互干涉。設(shè)桿件直徑為的圓柱體,若兩相鄰桿件軸線之間的距離為計與運動學(xué)分析") ,則
,則計與運動學(xué)分析") 。
。
2.護理床穩(wěn)定平臺工作空間的確定
上平臺的面積是1500×1000(計與運動學(xué)分析") ),每個液壓缸的最小長度為1000mm,最大伸長量為800mm,每個胡克鉸的擺角為±45°,每個球鉸的擺角為±45°。滿足:
),每個液壓缸的最小長度為1000mm,最大伸長量為800mm,每個胡克鉸的擺角為±45°,每個球鉸的擺角為±45°。滿足:
計與運動學(xué)分析")
用MATLAB仿真得到工作空間,如圖6所示。對結(jié)果進行分析:綠色區(qū)域是穩(wěn)定平臺的安全工作區(qū),紅色區(qū)域為穩(wěn)定平臺的危險工作區(qū)域。根據(jù)工程實際,穩(wěn)定平臺的調(diào)整范圍一般在綠色區(qū)域。
計與運動學(xué)分析")
七、結(jié)束語
三維設(shè)計仿真技術(shù)應(yīng)用于醫(yī)療護理設(shè)備的最大的優(yōu)勢在于其集成化,而不是單純集中在參數(shù)化建模上。本文采用的是基于SolidWorks 的多功能自平衡護理床的設(shè)計,在實體裝配、運動仿真和工作空間等多個方面進行詳細闡述,其基本功能為自動調(diào)平衡、床與輪椅轉(zhuǎn)換和床身直立等,適用于醫(yī)院、家用、救護車和大型船只等。














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論