永磁同步電機(jī)由于其轉(zhuǎn)動(dòng)慣量低、效率高、控制方式便捷等優(yōu)點(diǎn),已成為當(dāng)今伺服系統(tǒng)中最佳的執(zhí)行結(jié)構(gòu)之一。
2023-06-29 10:55:31 720
720 
慣量是什么意思?慣量有什么作用?有何意義?伺服電機(jī)選型時(shí),為什么要慣量匹配?
2021-06-28 09:11:33
虛擬同步發(fā)電機(jī)控制的基本原理是什么?測(cè)量虛擬同步發(fā)電機(jī)慣量與阻尼系數(shù)的方法有哪些?
2021-10-21 06:48:10
原創(chuàng)財(cái)神機(jī)械與藝術(shù)文中參考文獻(xiàn),模型源文件均提供下載,見文末。圖1 | 伺服電機(jī)內(nèi)部結(jié)構(gòu)圖(來源:百度)財(cái)神哥剛工作的那會(huì)兒,年少輕狂,就像剛高考完的高中生上知天文下知地理,總覺得自己能徒手造高達(dá)。記得當(dāng)時(shí)接手一個(gè)旋轉(zhuǎn)盤的設(shè)計(jì),見下圖。圖2| 轉(zhuǎn)臺(tái)三維模型在把機(jī)械機(jī)構(gòu)確定完后,一通受力分析,等效力矩計(jì)算,一個(gè)數(shù)據(jù)清晰的電機(jī)選型躍然紙上,然后興沖沖的把報(bào)告交給總工。你以為總工會(huì)劈頭蓋臉的數(shù)落我一頓嗎?沒有。電機(jī)型號(hào)順利的通過審核,交給采購,然后就來到了裝配調(diào)試現(xiàn)場。...
2021-06-28 09:53:45
轉(zhuǎn)動(dòng)慣量和電機(jī)扭矩的關(guān)系是什么?
2021-10-13 09:10:45
定義:轉(zhuǎn)動(dòng)慣量(Moment of Inertia)是剛體繞軸轉(zhuǎn)動(dòng)時(shí)慣性(回轉(zhuǎn)物體保持其勻速圓周運(yùn)動(dòng)或靜止的特性)的量度,用字母I或J表示。轉(zhuǎn)動(dòng)慣量在旋轉(zhuǎn)動(dòng)力學(xué)中的角色相當(dāng)于線性動(dòng)力學(xué)中的質(zhì)量,可
2021-06-28 08:41:02
轉(zhuǎn)動(dòng)慣量是個(gè)啥?為啥要算轉(zhuǎn)動(dòng)慣量?啥是慣量匹配?力矩夠了,為啥電機(jī)還是抖個(gè)不停?齒輪傳動(dòng)夠了,可電機(jī)為啥還是抽搐個(gè)不停啊?
2021-06-28 09:40:07
轉(zhuǎn)動(dòng)慣量這個(gè)概念怎么理解,參數(shù)怎么設(shè)置???電機(jī)能承受的轉(zhuǎn)動(dòng)慣量是電機(jī)的轉(zhuǎn)動(dòng)慣量的3倍嗎??
SEW 的我知道經(jīng)驗(yàn)值是電機(jī)慣量的3倍!
2023-11-16 08:18:17
Pmsm在旋轉(zhuǎn)坐標(biāo)系的數(shù)學(xué)模型坐標(biāo)變換dq軸電壓方程整體模型電壓計(jì)算模塊dq軸磁鏈計(jì)算d,q軸電流轉(zhuǎn)距計(jì)算轉(zhuǎn)速計(jì)算仿真結(jié)果因?yàn)?b class="flag-6" style="color: red">轉(zhuǎn)動(dòng)慣量較小,轉(zhuǎn)速迅速跟隨同步轉(zhuǎn)速順利啟動(dòng)。A相電流與電壓波形...
2021-08-27 07:56:09
Sizer 工具能進(jìn)行負(fù)載轉(zhuǎn)動(dòng)慣量、負(fù)載轉(zhuǎn)矩計(jì)算么?
2023-11-22 07:59:47
伺服驅(qū)動(dòng)系統(tǒng)(ServoSystem)簡稱伺服系統(tǒng),是一種以機(jī)械位置或角度作為控制對(duì)象的自動(dòng)控制系統(tǒng),例如數(shù)控機(jī)床等。使用在伺服系統(tǒng)中的驅(qū)動(dòng)電機(jī)要求具有響應(yīng)速度快、定位準(zhǔn)確、轉(zhuǎn)動(dòng)慣量(使用在機(jī)電系統(tǒng)
2017-07-05 22:02:40
電子電路、軟件編程、機(jī)械結(jié)構(gòu)等相關(guān)專業(yè)知識(shí),最后是被測(cè)對(duì)象的相關(guān)背景及測(cè)試要點(diǎn),這是最重要的。下面以測(cè)量某個(gè)回轉(zhuǎn)體的轉(zhuǎn)動(dòng)慣量為例,細(xì)說一下。 測(cè)試測(cè)量的基本方式和方法,具體到轉(zhuǎn)動(dòng)慣量測(cè)量方法,就有三線擺法
2015-02-03 16:11:24
: 測(cè)試行業(yè)需要了解測(cè)試測(cè)量的基本方式和方法,然后需要電子電路、軟件編程、機(jī)械結(jié)構(gòu)等相關(guān)專業(yè)知識(shí),最后是被測(cè)對(duì)象的相關(guān)背景及測(cè)試要點(diǎn),這是最重要的。下面以測(cè)量某個(gè)回轉(zhuǎn)體的轉(zhuǎn)動(dòng)慣量為例,細(xì)說一下。 測(cè)試
2018-06-21 11:40:48
西安理工大學(xué)自動(dòng)化與信息工程學(xué)院的研究人員任碧瑩、邱姣姣等,在2019年第1期《電工技術(shù)學(xué)報(bào)》上撰文,針對(duì)虛擬同步發(fā)電機(jī)(VSG)雙機(jī)并聯(lián)系統(tǒng)在采用固定的轉(zhuǎn)動(dòng)慣量及阻尼系數(shù)時(shí)無法兼顧有功功率振蕩
2021-09-09 09:08:59
近年來,由于能源、環(huán)境、技術(shù)等因素,新能源領(lǐng)域得到廣泛的關(guān)注和發(fā)展,分布式電源在電力系統(tǒng)的滲透率不斷提升,與此同時(shí),傳統(tǒng)的同步發(fā)電機(jī)裝置比例逐漸降低,電力系統(tǒng)的旋轉(zhuǎn)備用容量及轉(zhuǎn)動(dòng)慣量相對(duì)減少。由于
2021-07-07 06:28:17
最近在用松下伺服電機(jī)。它的自整定效果真的不錯(cuò)。只需要輸入剛性,就可以自己整定參數(shù)了。包括負(fù)載慣量。
我自己也做電機(jī)控制器之類的東西。但是僅限于電流環(huán)速度環(huán)位置環(huán)仨pid就完事了。不太理解慣量這個(gè)參數(shù)
2023-07-31 15:39:42
伺服電機(jī)慣量問題
2021-02-03 07:29:37
”的系統(tǒng):運(yùn)動(dòng)指令變化緩慢的伺服系統(tǒng), 不需校驗(yàn)負(fù)載慣量,但是合適的負(fù)載慣量有助于減小速度波動(dòng)。 JL 負(fù)載慣量;Jm 伺服電機(jī)慣量 概念 慣量就是剛體繞軸轉(zhuǎn)動(dòng)的慣性的度量。轉(zhuǎn)動(dòng)慣量是表征剛體轉(zhuǎn)動(dòng)
2023-03-07 15:37:58
1、伺服電機(jī)有小、中、大慣量的,如何選擇啊?大慣量的是不是是不是配大慣性的負(fù)載?小慣量的是不是配小慣量的負(fù)載?這個(gè)有什么好處呢?2、如果一個(gè)設(shè)備有大慣量,選用了大慣量的伺服電機(jī)就不會(huì)出現(xiàn)制動(dòng)不良了嗎?設(shè)備就不會(huì)過沖了嗎?
2023-03-07 15:41:58
如何估測(cè)負(fù)載慣量比? 伺服電機(jī)的負(fù)載慣量比是什么意思?負(fù)載、電機(jī)慣量比有什么影響? 什么是負(fù)載慣量?
2021-11-01 07:30:45
瞬時(shí)最大扭矩一般都在電機(jī)啟動(dòng)時(shí),負(fù)載慣量是折算到電機(jī)軸上的負(fù)載慣量。傳動(dòng)比=從動(dòng)輪齒數(shù)/主動(dòng)輪齒數(shù)=主動(dòng)輪轉(zhuǎn)速/從動(dòng)輪轉(zhuǎn)速傳動(dòng)軸轉(zhuǎn)動(dòng)慣量計(jì)算:J主動(dòng)輪=J從動(dòng)輪/i^2i = n主動(dòng)輪/n從動(dòng)輪(圖中的R即為傳動(dòng)比)...
2021-06-28 06:45:56
選擇電機(jī)時(shí),要計(jì)算慣量比:負(fù)載轉(zhuǎn)動(dòng)慣量/電機(jī)轉(zhuǎn)子轉(zhuǎn)動(dòng)慣量,我想問:如果電機(jī)通過減速器帶動(dòng)負(fù)載,那負(fù)載轉(zhuǎn)動(dòng)慣量是不是要折算到到電機(jī)軸,也就是除以減速比的平方,得到折算后的轉(zhuǎn)動(dòng)慣量/電機(jī)轉(zhuǎn)動(dòng)慣量=慣量比
2021-06-28 10:01:08
利用周期性的正余弦位置指令和轉(zhuǎn)矩指令實(shí)現(xiàn)轉(zhuǎn)動(dòng)慣量離線辨識(shí)。 李俊 電機(jī)與控制應(yīng)用 1 伺服系統(tǒng)動(dòng)力學(xué)模型 伺服電機(jī)的運(yùn)動(dòng)方程為 2 傳統(tǒng)轉(zhuǎn)動(dòng)慣量離線辨識(shí)算法的局限性 式(1)中,可以通過測(cè)量得到
2023-03-01 13:59:53
1.買質(zhì)量好的,這最簡單哈。百度一下,進(jìn)口的日本東方,國產(chǎn)的鳴志,號(hào)稱第一。2.轉(zhuǎn)動(dòng)慣量越大轉(zhuǎn)的越平隱,如何大?選功率大些的,這樣才能帶的負(fù)載重些,同樣重量半徑越大慣量越大,所以負(fù)載設(shè)計(jì)盡量接近圓盤
2021-07-08 06:52:37
1.使用Motor Profiler 測(cè)試電機(jī)性能,它可以粗略的測(cè)出電機(jī)的內(nèi)阻,電感,最高轉(zhuǎn)速,轉(zhuǎn)動(dòng)慣量,感生電動(dòng)勢(shì)系數(shù)Ke等電機(jī)參數(shù)以供Workbench在生成代碼的時(shí)候使用。 在此過程中不多
2021-09-16 08:29:53
同步發(fā)電機(jī)轉(zhuǎn)子的轉(zhuǎn)動(dòng)慣量與運(yùn)動(dòng)方程(二) 同步發(fā)電機(jī)的轉(zhuǎn)子運(yùn)動(dòng)方程由于問題已經(jīng)特化,因此在(一)部分的計(jì)算公式中,轉(zhuǎn)矩、角速度等矢量都共線,此時(shí)為了簡化計(jì)算,如果不做特殊說明,下面的公式均為標(biāo)量
2021-09-03 08:06:33
同步發(fā)電機(jī)轉(zhuǎn)子的慣性與轉(zhuǎn)動(dòng)慣量(一) 基本物理概念1.1 轉(zhuǎn)動(dòng)慣量轉(zhuǎn)動(dòng)慣量又稱慣性矩(Moment of inertia),通常以J表示,國際單位制下的量綱為[kg·m2]。轉(zhuǎn)動(dòng)慣量是一個(gè)物體對(duì)于其
2021-06-30 07:37:54
四旋翼飛行器控制模型為便于建立模型,現(xiàn)對(duì)四旋翼飛行器進(jìn)行以下假設(shè):1、四旋翼飛行器是均勻?qū)ΨQ的剛體2、四旋翼飛行器的質(zhì)量和轉(zhuǎn)動(dòng)慣量不發(fā)生改變3、四旋翼飛行器的幾何中心與其重心重合4、四旋翼飛行器只受
2021-09-15 07:22:37
大家覺得這個(gè)課題的實(shí)現(xiàn)方法什么,能不能幫我參考一下
2016-05-27 13:13:11
如何建立VSG雙機(jī)并聯(lián)系統(tǒng)的小信號(hào)模型?轉(zhuǎn)動(dòng)慣量及阻尼系數(shù)對(duì)輸出有功特性的影響是什么?
2021-10-22 09:04:40
如果電機(jī)通過減速器帶動(dòng)負(fù)載,那負(fù)載轉(zhuǎn)動(dòng)慣量是不是要折算到到電機(jī)軸?
2021-09-29 09:14:42
1如果是豎直安裝的軸,正常轉(zhuǎn)動(dòng)時(shí)需克服軸承的摩擦力F,其扭矩T1=FR (R為摩擦半徑)2啟動(dòng)時(shí)需克服慣性力矩T2,T2=J ε (J為轉(zhuǎn)動(dòng)慣量,ε 為角加速度), H# E% }# _/ l7
2021-09-15 07:23:15
步進(jìn)電機(jī)輸出軸上的轉(zhuǎn)動(dòng)慣量和扭矩計(jì)算: 力矩=力*力臂你套上的輪轉(zhuǎn)一圈5cm長,可以算得輪的半徑0.8cm。所需力矩=20*0.8=16kg.cm。提起重物要求多大的速度,轉(zhuǎn)換成速度單位RPM
2021-07-08 07:26:35
廠家數(shù)據(jù)的正確性。無奈之下我們只有打開電機(jī),對(duì)轉(zhuǎn)子重量及外形尺寸進(jìn)行測(cè)量,并且根據(jù)測(cè)量數(shù)據(jù)計(jì)算出轉(zhuǎn)子的轉(zhuǎn)動(dòng)慣量。下面以實(shí)測(cè)轉(zhuǎn)子重量 0.15 kg,以及實(shí)測(cè)直徑0.029 m,來計(jì)算轉(zhuǎn)子的轉(zhuǎn)子慣量:J
2018-10-12 09:52:17
永磁同步電機(jī)參數(shù)辯識(shí)一次性辯識(shí)轉(zhuǎn)動(dòng)慣量、阻尼系數(shù)、負(fù)載轉(zhuǎn)矩。收斂速度快,準(zhǔn)確度高。原創(chuàng),原創(chuàng),帶文檔資料。另外還有電阻、電感、反電勢(shì)常數(shù)的辯識(shí)模型,爽快也可送。
2021-08-27 06:50:41
。電機(jī)的相電阻 為0.415 ,直軸和交軸電感分別為 0.0045、0.0054 、永磁體磁鏈為 0.8767、轉(zhuǎn)動(dòng)慣量、阻尼系數(shù)、極對(duì)數(shù)、靜摩擦力分別設(shè)置為1、0.0025、4、0,其他的初始...
2021-08-27 06:19:42
求助大佬步進(jìn)電機(jī)轉(zhuǎn)動(dòng)慣量大約在什么范圍呢?我看電機(jī)數(shù)據(jù)手冊(cè)上標(biāo)明12g*cm2也就是120kg*m2,在simulink仿真中轉(zhuǎn)動(dòng)慣量一般才0.003kg*m2為什么量級(jí)會(huì)差這么多呢?還是小弟哪里
2021-12-26 11:47:12
遇到了難題,如果采用傳統(tǒng)的電流轉(zhuǎn)速雙閉環(huán)控制,由于轉(zhuǎn)動(dòng)慣量較大,PI輸入會(huì)一直很大,那么會(huì)不會(huì)造成調(diào)節(jié)器的飽和,然后就不可控了,大家有什么好的想法,或者以前有相關(guān)的經(jīng)驗(yàn),可以一起探討學(xué)習(xí),謝謝。
2016-09-01 10:34:13
電機(jī)參數(shù):額定電壓440V,額定電流15.4,額定功率5.5KW,電樞回路電阻3.01歐,電樞回路電感30.5毫亨,轉(zhuǎn)動(dòng)慣量0.128千克.米2,質(zhì)量106千克
2014-04-21 19:42:03
伺服電機(jī)加減速機(jī)后慣量放大多少?加減速機(jī)之后的等效慣量是這樣計(jì)算:Ja = J0 + J1 + J2/n^2其中J0是電機(jī)軸的慣量,J1是減速機(jī)的慣量,J2是負(fù)載慣量,n^2表示n的平方 。一般情況下慣量和加減速是相關(guān)的,只要加減速時(shí)間長一點(diǎn),一般不會(huì)出什么問題,勻速的時(shí)候其實(shí)不太消耗能量...
2021-07-05 06:51:03
轉(zhuǎn)矩公式:T=F?rT=F*rT=F?r轉(zhuǎn)矩=扭力*作用半徑電機(jī)功率:P=F?VP=F*VP=F?V功率=力*速度轉(zhuǎn)動(dòng)慣量: J=∫mr2dmJ=∫ mr ^2 dmJ=∫mr2dm轉(zhuǎn)動(dòng)慣量是表征
2021-08-31 06:35:47
線控轉(zhuǎn)向轉(zhuǎn)向盤總成分為兩個(gè)部分,轉(zhuǎn)向盤至扭矩傳感器上部和扭矩傳感器下部至路感電機(jī),姑且稱之為轉(zhuǎn)向盤部分和路感電機(jī)部分。轉(zhuǎn)向盤部分對(duì)轉(zhuǎn)向盤與轉(zhuǎn)矩傳感器進(jìn)行動(dòng)力學(xué)分析,考慮轉(zhuǎn)向盤轉(zhuǎn)動(dòng)慣量與粘性阻尼,并將
2021-09-15 09:26:01
了虛擬轉(zhuǎn)動(dòng)慣量與虛擬阻尼的交錯(cuò)控制.通過 MATLAB/Simulink 仿真工具進(jìn)行了算法的驗(yàn)證。..
2021-06-30 07:06:25
)、什么叫慣量匹配電機(jī)具有轉(zhuǎn)動(dòng)慣量J,這是電機(jī)一個(gè)很重要的參數(shù),很多情況下我們發(fā)現(xiàn)根據(jù)公式轉(zhuǎn)速,扭矩都吻合但我們選的電機(jī)依然會(huì)有問題這時(shí)候我們就需要關(guān)注一下這個(gè)轉(zhuǎn)動(dòng)慣量J了,不同結(jié)構(gòu)的轉(zhuǎn)動(dòng)慣量計(jì)算有不同的公式
2018-10-11 11:13:35
請(qǐng)問,如何確定電機(jī)的阻尼系數(shù)B和轉(zhuǎn)動(dòng)慣量J
2020-07-02 18:49:03
到的值可能不一樣.估測(cè)負(fù)載慣量比時(shí)要求0-2000rpm加速時(shí)間在1S以下,運(yùn)轉(zhuǎn)速度200rpm以上.伺服電機(jī)的負(fù)載慣量比是什么意思 - ____ 轉(zhuǎn)子的轉(zhuǎn)動(dòng)慣量.大,中,小各有各的用途,小慣量的高速
2021-09-01 08:48:57
減速機(jī)輸出軸是否有轉(zhuǎn)動(dòng),確認(rèn)減速機(jī)精度、減速比是否滿足。若減速比滿足不了會(huì)導(dǎo)致轉(zhuǎn)動(dòng)慣量無法匹配,負(fù)載停止時(shí)會(huì)有震蕩和抖動(dòng)。 4、檢查松下伺服驅(qū)動(dòng)的增益是否有提高,還有伺服驅(qū)動(dòng)參數(shù)中轉(zhuǎn)動(dòng)慣量是否有增大。 5、咨詢松下伺服電機(jī)供應(yīng)商或代理商,邀請(qǐng)售后服務(wù)支持并解決。
2016-01-13 14:25:00
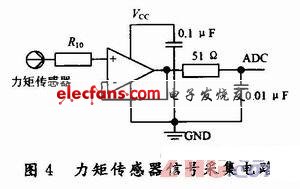
傳感器的死區(qū),可采用質(zhì)量小和摩擦力小的葉輪。1、減小葉輪的質(zhì)量我們知道葉輪的轉(zhuǎn)動(dòng)慣量:J=mR2式中 m——葉輪的轉(zhuǎn)動(dòng)慣量;R——葉輪的半徑。從算式中知道減小葉輪的質(zhì)量m可以達(dá)到減小流量傳感器死區(qū)
2021-09-28 11:19:02
1、講述“用剛體轉(zhuǎn)動(dòng)儀測(cè)剛體轉(zhuǎn)動(dòng)慣量”實(shí)驗(yàn)的實(shí)驗(yàn)原理 2、介紹實(shí)驗(yàn)的操作要領(lǐng)、數(shù)據(jù)處理等3、測(cè)量環(huán)狀、圓塊物體的轉(zhuǎn)動(dòng)慣量。4、指導(dǎo)學(xué)生進(jìn)行實(shí)驗(yàn)操作、觀察實(shí)
2008-12-03 19:50:43 21
21 介紹集成開關(guān)型霍爾傳感器的優(yōu)點(diǎn)、特性測(cè)量廈其在物理實(shí)驗(yàn)和自動(dòng)化監(jiān)測(cè)中的應(yīng)用。
2009-04-06 09:32:5419 三線擺 1.掌握三線擺法測(cè)定轉(zhuǎn)動(dòng)慣量的原理和方法。2.驗(yàn)證平行軸定理。 實(shí)驗(yàn)原理 轉(zhuǎn)動(dòng)慣量是物體轉(zhuǎn)動(dòng)慣性的量度。物
2009-06-09 09:16:080 剛體轉(zhuǎn)動(dòng)的研究:1.用轉(zhuǎn)動(dòng)慣量儀研究剛體轉(zhuǎn)動(dòng)時(shí)合外力矩與剛體轉(zhuǎn)動(dòng)角加速度的關(guān)系。2.考查剛體的質(zhì)量分布改變時(shí)對(duì)轉(zhuǎn)動(dòng)的影響。3.學(xué)習(xí)作圖法處理實(shí)驗(yàn)數(shù)據(jù)。1.轉(zhuǎn)動(dòng)系統(tǒng)
2009-06-09 09:23:1322 擾流板來實(shí)現(xiàn)超高性能和低轉(zhuǎn)動(dòng)慣量。傳感器工作時(shí),輕質(zhì)擾流板會(huì)隨著傳感器軸旋轉(zhuǎn),從而改變印刷電路線圈的電感。產(chǎn)生的變化通過獲得專利的自動(dòng)處理電路加以精密測(cè)量。該信號(hào)
2023-06-16 11:31:18
轉(zhuǎn)動(dòng)慣量和轉(zhuǎn)動(dòng)定律是剛體力學(xué)的一個(gè)重要物理量,是物理學(xué)的基本概念和基本定律。大小的量度,是研究、設(shè)計(jì)和控制轉(zhuǎn)動(dòng)物體運(yùn)動(dòng)的重要參數(shù)。它的大小與剛體的質(zhì)量分布
2010-07-17 09:50:1412 目 錄引言·實(shí)驗(yàn)1 質(zhì)點(diǎn)的轉(zhuǎn)動(dòng)慣量實(shí)驗(yàn)2 向心力實(shí)驗(yàn)3 質(zhì)點(diǎn)的角動(dòng)量守恒·實(shí)驗(yàn)4 圓盤和圓環(huán)的轉(zhuǎn)動(dòng)慣量實(shí)驗(yàn)5 圓盤繞偏軸的轉(zhuǎn)動(dòng)慣量(固定軸/轉(zhuǎn)動(dòng)軸)實(shí)驗(yàn)6 角動(dòng)
2010-07-19 11:49:330 多缸柴油機(jī)的工作順序
用多缸結(jié)構(gòu)型式。 飛輪是一個(gè)具有較大轉(zhuǎn)動(dòng)慣量的圓盤,安裝在柴油機(jī)的曲軸后端
2008-03-21 10:16:499882 
轉(zhuǎn)動(dòng)慣量的測(cè)量研究
轉(zhuǎn)動(dòng)慣量是物體轉(zhuǎn)動(dòng)慣性大小的量度,對(duì)于大多數(shù)形狀復(fù)雜、質(zhì)量分布不均勻的物體,通常要用實(shí)驗(yàn)的方法來測(cè)定其
2008-11-24 15:13:274190
檢測(cè)物體轉(zhuǎn)動(dòng)電路
2009-02-09 12:54:33612 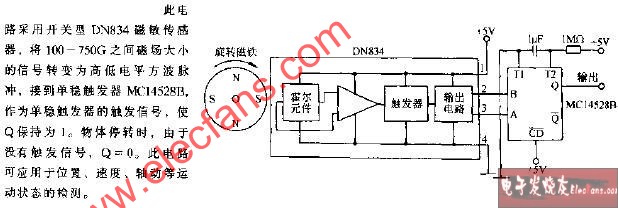
天線轉(zhuǎn)動(dòng)器電路
2009-03-17 21:58:38492 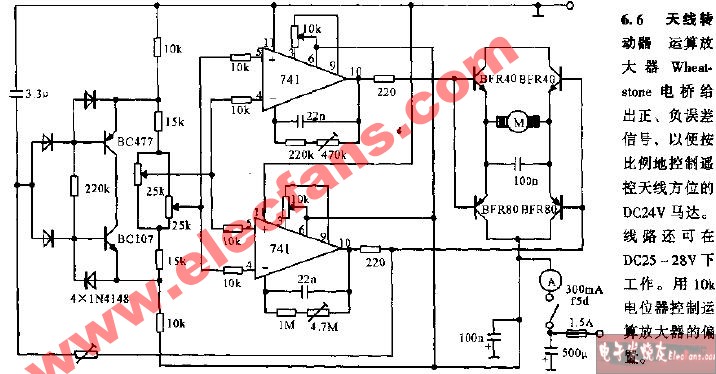
轉(zhuǎn)動(dòng)方向檢測(cè)電路
2009-04-26 12:05:011048 
轉(zhuǎn)軸轉(zhuǎn)動(dòng)狀況檢測(cè)電路
2009-04-26 12:06:18668 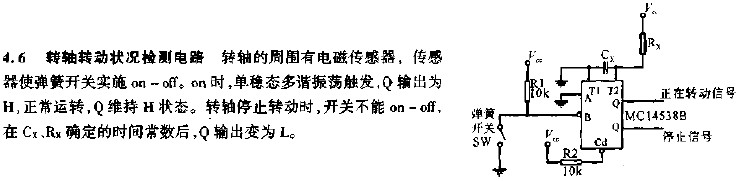
檢測(cè)轉(zhuǎn)動(dòng)方向的電路圖
2009-07-06 13:32:22487 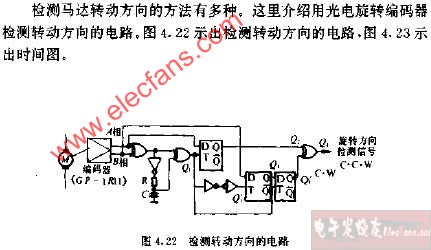
為了滿足物體轉(zhuǎn)動(dòng)慣量測(cè)試的需求,基于虛擬儀器技術(shù),利用數(shù)據(jù)采集卡及LABVIEW軟件設(shè)計(jì)開發(fā)了轉(zhuǎn)動(dòng)慣量測(cè)試系統(tǒng)。該系統(tǒng)利用數(shù)據(jù)采集卡采集由光電傳感器產(chǎn)生的電壓脈沖信號(hào),將采
2013-01-18 17:40:2538 伺服驅(qū)動(dòng)系統(tǒng)是一種以機(jī)械位置或角度作為控制對(duì)象的自動(dòng)控制系統(tǒng),例如數(shù)控機(jī)床等。伺服系統(tǒng)中的驅(qū)動(dòng)電機(jī)要求具有響應(yīng)速度快、定位準(zhǔn)確、轉(zhuǎn)動(dòng)慣量( 機(jī)電系統(tǒng)中的伺服電機(jī)的轉(zhuǎn)動(dòng)慣量較大,為了能夠和絲杠等機(jī)械部件直接相連,也為了得到極高的響應(yīng)速度,伺服電機(jī)有一種專門的小慣量電機(jī)。
2017-06-08 10:13:2016740 變頻電機(jī)是指在標(biāo)準(zhǔn)環(huán)境條件下,以100%額定負(fù)載在10%~100%額定速度范圍內(nèi)連續(xù)運(yùn)行,溫升不會(huì)超過該電機(jī)標(biāo)定容許值的電機(jī)。
2017-06-20 16:03:423932 介紹集成開關(guān)型霍爾傳感器的優(yōu)點(diǎn)、特性測(cè)量廈其在物理實(shí)驗(yàn)和自動(dòng)化監(jiān)中的應(yīng)用。
2017-09-08 16:01:178 BSH系列電機(jī)是自身轉(zhuǎn)動(dòng)慣量低的交流同步伺服電機(jī),特別設(shè)計(jì)用于高動(dòng)態(tài)的定位任務(wù)。
驅(qū)動(dòng)系統(tǒng)由伺服電機(jī)和附帶的驅(qū)動(dòng)放大器組成。僅當(dāng)電機(jī)和驅(qū)動(dòng)放大器相互協(xié)調(diào)時(shí),才會(huì)實(shí)現(xiàn)理想性能。
2017-09-26 14:29:194 :旋轉(zhuǎn)測(cè)量(包含飽和曲線測(cè)量、轉(zhuǎn)動(dòng)慣量測(cè)量和速度控制器優(yōu)化)和速度控制器優(yōu)化(包含轉(zhuǎn)動(dòng)慣量測(cè)量和速度控制器優(yōu)化)。
2017-12-01 17:29:4816 慣量就是剛體繞軸轉(zhuǎn)動(dòng)的慣性的度量,轉(zhuǎn)動(dòng)慣量是表征剛體轉(zhuǎn)動(dòng)慣性大小的物理量。它與剛體的質(zhì)量、質(zhì)量相對(duì)于轉(zhuǎn)軸的分布有關(guān)。(剛體是指 理想狀態(tài)下的不會(huì)有任何變化的物體),選擇的時(shí)候遇到電機(jī)慣量,也是伺服
2018-02-05 11:23:5357395 飛輪可以用來減少機(jī)械運(yùn)轉(zhuǎn)過程的速度波動(dòng)。具有適當(dāng)轉(zhuǎn)動(dòng)慣量、起貯存和釋放動(dòng)能作用的轉(zhuǎn)動(dòng)構(gòu)件,常見于機(jī)器、汽車、自行車等,具有較大轉(zhuǎn)動(dòng)慣量的輪狀蓄能器。
2018-02-05 11:26:2464888 在交流伺服系統(tǒng)中,負(fù)載轉(zhuǎn)矩及系統(tǒng)轉(zhuǎn)動(dòng)慣量的變化所引起的擾動(dòng)將會(huì)影響伺服系統(tǒng)的動(dòng)態(tài)性能。本文提出一種基于轉(zhuǎn)動(dòng)慣量辨識(shí)的自適應(yīng)擾動(dòng)觀測(cè)器,以系統(tǒng)運(yùn)動(dòng)方程為算法模型,選取包含轉(zhuǎn)動(dòng)慣量和負(fù)載轉(zhuǎn)矩信息且具有
2018-03-28 13:50:242 電機(jī)轉(zhuǎn)子轉(zhuǎn)動(dòng)慣量獲取方法研究
2018-04-08 14:47:192 高慣量的伺服電機(jī)就比較粗大,力矩大,合適大力矩的但不很快往復(fù)運(yùn)動(dòng)的場合。因?yàn)楦咚龠\(yùn)動(dòng)到中止,驅(qū)動(dòng)器要發(fā)生很大的反向驅(qū)動(dòng)電壓來中止這個(gè)大慣量,發(fā)熱就很大了。
2020-02-24 08:28:2126240 為了提高建模及計(jì)算速度,首先建立排氣系統(tǒng)、動(dòng)力總成、懸置系統(tǒng)及副車架有限元模型,如圖1所示。其中動(dòng)力總成和排氣系統(tǒng)懸置用CBUSH單元表示,剛度值為測(cè)試值。動(dòng)力總成質(zhì)心、質(zhì)量及轉(zhuǎn)動(dòng)慣量數(shù)據(jù)通過轉(zhuǎn)動(dòng)慣量測(cè)試臺(tái)測(cè)試得到。排氣系統(tǒng)掛鉤用CBEAM單元表示。
2020-04-06 17:52:00949 
交流伺服電動(dòng)機(jī)的轉(zhuǎn)子通常做成鼠籠式,但為了使伺服電動(dòng)機(jī)具有較寬的調(diào)速范圍、線性的機(jī)械特性,無“自轉(zhuǎn)”現(xiàn)象和快速響應(yīng)的性能,它與普通電動(dòng)機(jī)相比,應(yīng)具有轉(zhuǎn)子電阻大和轉(zhuǎn)動(dòng)慣量小這兩個(gè)特點(diǎn)。目前應(yīng)用較多
2020-06-05 11:18:499074 啟動(dòng)慣頻特性是指步進(jìn)電動(dòng)機(jī)帶動(dòng)純慣性負(fù)載啟動(dòng)時(shí),啟動(dòng)頻率與轉(zhuǎn)動(dòng)慣量之間的關(guān)系。
2022-12-09 11:24:285107 傳動(dòng)慣量對(duì)伺服系統(tǒng)的精度,穩(wěn)定性,動(dòng)態(tài)響應(yīng)都有影響。慣量大,系統(tǒng)的機(jī)械常數(shù)大,響應(yīng)慢,會(huì)使系統(tǒng)的固有頻率下降,容易產(chǎn)生諧振,因而限制了伺服帶寬,影響了伺服精度和響應(yīng)速度,慣量的適當(dāng)增大只有在改善低速爬行時(shí)有利。
2022-12-16 14:43:483865 目前的VSG研究多側(cè)重于技術(shù)的優(yōu)化與改進(jìn),少有特性測(cè)量方面的研究成果。在實(shí)際的VSG應(yīng)用中也通常是使用慣性時(shí)
間常數(shù)綜合表征系統(tǒng)轉(zhuǎn)動(dòng)慣量J與阻尼系數(shù)D,這種表征方式中轉(zhuǎn)動(dòng)慣量與阻尼系數(shù)耦合,無法
2023-03-28 10:45:030 提出了一種應(yīng)用于虛擬同步發(fā)電機(jī)的轉(zhuǎn)動(dòng) 慣量和阻尼系數(shù)協(xié)調(diào)自適應(yīng)控制策略,當(dāng)虛擬同步 發(fā)電機(jī)轉(zhuǎn)子角速度的變化率較大
時(shí),增大轉(zhuǎn)動(dòng)慣量;當(dāng)角速度偏離量較大時(shí),增大阻尼系數(shù),2個(gè)變量協(xié) 調(diào)控制從而抑制
2023-03-28 10:27:176 元件,且具有機(jī)電時(shí)間常數(shù)小、線性度高、始動(dòng)電壓等特性,可把所收到的電信號(hào)轉(zhuǎn)換成電動(dòng)機(jī)軸上的角位移或角速度輸出。一、慣量慣量就是剛體繞軸轉(zhuǎn)動(dòng)的慣性的度量,轉(zhuǎn)動(dòng)慣量是表
2023-02-21 15:25:012583 
RVIT15-60角度傳感器采用四個(gè)印刷電路線圈和一個(gè)輕質(zhì)導(dǎo)電擾流板來實(shí)現(xiàn)超高性能和低轉(zhuǎn)動(dòng)慣量。傳感器工作時(shí),輕質(zhì)擾流板會(huì)隨著傳感器軸旋轉(zhuǎn),從而改變印刷電路線圈的電感。產(chǎn)生的變化通過獲得專利的自動(dòng)處理電路加以精密測(cè)量。該信號(hào)隨后被轉(zhuǎn)換為與轉(zhuǎn)軸角度成正比的線性直流電壓輸出。
2023-06-07 11:24:01267 
永磁同步電機(jī)具有體積小、轉(zhuǎn)動(dòng)慣量低、結(jié)構(gòu)簡單等優(yōu)點(diǎn),被廣泛應(yīng)用于控制系統(tǒng)中。
2023-06-29 10:37:16423 
伺服電機(jī)中的慣量、高低慣量、小中大慣量都是什么,本文就給大家詳細(xì)講解下。
2023-07-23 15:37:441112 電機(jī)慣量是指電機(jī)內(nèi)部物理構(gòu)造的一種量度,它描述了電機(jī)在旋轉(zhuǎn)時(shí)所具有的抗力大小。這個(gè)概念通常用來描述機(jī)械運(yùn)動(dòng)系統(tǒng)中各個(gè)部件的慣性大小,包括轉(zhuǎn)子、軸、齒輪等。在伺服系統(tǒng)、機(jī)器人、自動(dòng)化生產(chǎn)線等領(lǐng)域,準(zhǔn)確測(cè)量和控制電機(jī)慣量對(duì)于實(shí)現(xiàn)高精度的控制和運(yùn)動(dòng)是非常重要的。
2023-09-12 10:48:22990
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論