 電子發燒友App
電子發燒友App


1 引 言
滾珠螺母是滾珠絲杠副的內螺紋元件,它的精度直接影響滾珠絲杠副的傳動質量。因其摩擦小、效率高、運行平穩、壽命長、可逆傳動及零間隙等優點,廣泛應用于精密機械、機床、汽車、船舶、航空航天及計算機等行業。滾珠絲杠與螺母之間以鋼球為運動載體構成滾動摩擦,摩擦性能優良。由于螺母內表面結構較為復雜,無論設計還是制造工藝都比絲杠困難,尤其是它的內部參數較難測量。滾珠螺母的常規測量方法[1, 2]有固定式檢測儀、鋼珠接觸法及相對測量法,它們都屬于接觸測量,每種方法只能測量一種或兩種參數。有些參數能定量測量,有些則靠綜合量規檢定或透光法定性檢測,個別參數無法測量,螺母的形位誤差測量尤為困難。根據技術規范[2],滾珠螺母公稱直徑的圓度、滾道跳動及滾道對其外徑的同軸度應滿足一定的公差要求。由于滾珠螺母公稱直徑不同于普通光滑圓柱面,它是看不見且指針無法觸及到的虛擬要素,所以它的形位誤差無法用普通方法精確測量,目前的測量是以標準絲杠樣件為基準進行形位誤差測量,而絲杠本身存在誤差,導致測量結果的累積誤差較大,有些參數達不到要求。
本文提出一種改進的二次多項式插值法,將Canny邊緣檢測算子與3×3方向模板相結合確定邊緣方向,再利用Sobel邊緣檢測算子計算邊緣的亞像素位置,并推導了定位誤差公式,使CCD的分辨率提高40倍。計算測量了滾珠螺母的滾道圓度、圓柱度、徑向圓跳動及同軸度等形位誤差,誤差分別為f1=0. 013mm,f2=0. 016mm,f3=0. 022mm,f4=0. 014mm。在測量滾珠螺母的滾道圓度誤差時,提出了離散點非對稱分布在圓周附近時圓度誤差的最小區域評定方法。用簡單的解析方法論述了算法的實現過程,只需進行數次循環計算即可準確求出最小區域寬度(圓度誤差)。消除了方法誤差,減小了誤廢率,提高了測量精度。
2 輪廓邊緣分割
2.1 測量系統構成
測量系統主要由軟、硬件兩部分組成。其功能模塊分為圖像采集環節、處理環節、測量環節及結果分析幾部分。硬件部分包括CCD、工件及工作臺、計算機、接口卡及標定量塊等;軟件在VC++環境下自主開發,主要是圖像處理及后續測量的數據計算。
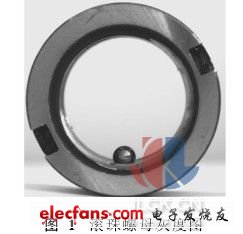
圖像質量直接影響檢測精度,本文采用大恒圖像公司生產的DH-HV3000FC彩色數字攝像頭,該攝像頭分辨率為2048×1536,像素尺寸為3. 2μm×3. 2μm, IEEE1394數字接口卡將采集到的數字圖像傳輸到計算機。采集圖像時,將直徑等于滾珠公稱直徑的標準測球放在滾道溝槽內,在重力作用下測球與光滑溝道最底部接觸。對采集到的彩色圖像進行灰度化處理,得到圖1所示的灰度圖像。
?
2.2 圖像分割
數字圖像存在一定噪聲,為獲得清晰的圖像輪廓,需對圖像進行降噪處理。均值濾波使圖像邊緣模糊,對幾何量測量誤差有較大影響。中值濾波對圖像中的顯著角點有影響。圖1中圖像的邊緣基本都是圓和圓弧曲線,個別角點對測量結果影響很小,所以采用3×3小鄰閾的中值濾波來消除個別毛刺噪聲的影響,效果較好。
圖像分割是圖像處理的重要內容,其目的是將目標從背景中分離出來。圖像分割主要分為閾值分割法和梯度分割法。閾值選取是閾值分割的關鍵,閾值選取過高,則過多的目標點被誤判為背景,閾值選取過低,又會使背景誤判為目標。梯度分割法[3, 4]獲得的邊界有時不是完全連通的,有一定程度的斷開,丟失了部分邊界像素,邊界連續性不好,
邊界定位不夠準確。有些微分邊緣檢測算子獲得的邊緣粗大,非邊界像素太多,給后續的圖像測量增加了難度。個別算子計算量較大、效率偏低,不適于實時測量要求。本文圖像是在實驗條件下采集的,經預處理噪聲已大為減少,利用Canny算子定位邊緣,該算子具有偏差最小、單向素寬、不丟失邊緣以及無虛假邊緣等優越性能,可提高邊緣的初始定位精度。圖2為Canny算子檢測到的邊緣,以此為基礎實施亞像素處理即可實現對參數的測量。

?
3 亞像素定位
亞像素定位技術是利用軟件算法來提高測量精度的有效途徑。亞像素定位的方法很多[3~7],插值是其中的一大類方法,多項式插值一般是通過邊緣檢測將邊緣定位到整像素位置,在水平方向和垂直方向做二次多項式插值,從而求出邊緣的精確位置。視覺測量中的圖像邊緣一般為階躍狀邊緣,邊緣的亞像素位置應垂直于邊緣,在梯度方向上度量。插值方法沒有考慮到像素點灰度的梯度方向,只在水平和垂直方向進行插值,所以這類方法存在誤差。
本文在Canny檢測的基礎上,計算出梯度方向,沿此方向對梯度圖像進行插值,確定邊緣的亞像素位置。Sobel算子可檢測邊緣的梯度,但在圖像中的噪聲較嚴重或圖像對比度較差等情況下,邊緣點的梯度存在較大誤差,導致檢測出的圓心誤差過大。
本文利用Canny檢測的初定位結果計算梯度方向。Canny邊緣檢測后得到一系列整像素邊緣點Pi(u,v),對孔的邊緣點,如果不考慮分辨率影響,Pi(u,v)應分布在理想圓(弧)上,此時梯度方向為半徑方向。設P0(u, v)為邊緣上的任意點,它的梯度幅值為R0(降噪后的灰度圖像進行Sobel邊緣檢測),沿邊緣方向(順時針方向)找到與其相鄰的兩個邊緣點P-1(u,v)、P1(u,v),邊緣方向的斜率為:
?
利用邊緣點P0(u,v)與梯度方向上的兩個相鄰插值點P0'和P0″的坐標及灰度梯度幅值即可計算邊緣點P0(u,v)的亞像素位置。設邊緣點P0(u,v)的灰度梯度幅值為R0,與P0(u,v)對應的梯度方向上兩個相鄰插值點P0'和P0″的灰度梯度幅值分別為R-1、R1,則邊緣點P0(u, v)的亞像素位置偏移為:

?




























 工商網監
工商網監
評論