?接入方式 - 車載自組網的發展與應用情況
MAC層主要是完成無線資源分布式仲裁和管理的工作,其接入方式首先需要考慮的是一個公平性的問題,可以從兩個角度進行考慮:①從節點的角度出發,力圖保證節點之間占用的信道帶寬相等。②從業務流的角度考慮,力圖保證業務流之間占用的信道帶寬相等。但是,不論從哪個角度考慮該問題,最終都歸結為如何在MAC協議中確保每個網絡節點的公平接入。
4.2.1 802.11DCF
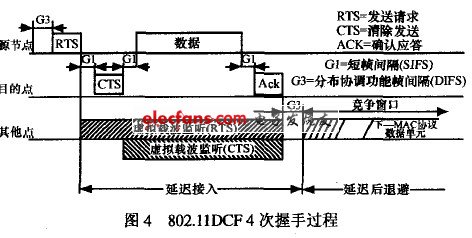
目前,應用較為廣泛的自組網MA C 協議是IEEE 802.11DCFt2sl協議。該協議基于CSMA/CA,節點首先通過競爭進行 rS,CTS信息的交互,在此基礎上實現信道的分配,過程如圖4 所示。
?
802.11DCF協議在本質上是以較小的RTS,CTS分組的交互,分配較大的無線資源,從而提高無線資源的利用率。
圖中發送方在發送數據之前應先發控制幀RTS;如果接收方收到RTS,在SIFS時間后用控制幀CTS對RTS進行確認;發送方收到確認的CTS,在等待SIFS時間后發數據包;接收方收到數據包,在等待SIFS時間后用ACK確認;發送方收到ACK后,數據包發送完畢。
然而,802.11DCF協議是為支持分組突發業務而設計的,它不支持實時業務。另外,802.11DCF協議采用的時間隨機退避機制不適用于同步網絡。
而車載自組網對數據的實時性要求很高,適合采用基于預約方式的同步MAC協議,因此基于競爭方式的802.11DCF不太適合在車載自組網中應用。
4.2.2 RR—ALOHA
在車間通信中要求具備較多的是廣播特性,因此對MAC層的可靠性要求非常嚴格。目前,對無連接業務的可靠性保證研究不多,針對車載自組網的可靠廣播研究也很少,目前提出的方法有:在廣播中增加控制幀劃分路段轉發數據包等。為了實現上述的分布式接入策略,根據車載自組網的特點提出了一種新的隨機接入方式RR—ALOHA [ (reliable reservation AL OHA),該協議在R—ALOHA基礎上改進:
①解決了隱藏終端和暴露終端的問題;
② 通過每幀周期廣播幀信息(FI,frame information),使所有的鄰節點都知道每一個時隙的信道使用狀況,從而使RR—AL OHA協議能夠在車載自組網中正確運行。FI是發送節點感知的前一幀的時隙狀態信息。RR—AL OHA 可以在不同的物理層標準下使用,尤其適合采用時隙結構的物理層。當有節點加入時,先偵聽一幀的時間,然后選擇一個空閑時隙發送一個分組,來預約這個時隙。如果鄰節點正確接收到了該分組,則在它的FI中標示出來。當新加入的節點從一幀時間內收到的所有FI中知道鄰節點都正確接受到分組時,即認為預約成功,從而將每幀的該時隙作為它的基本信道(BC,base channe1),直到節點離開網絡,在這期間其他節點不能訪問該時隙。其中,BC 信道用于傳送FI、其他信令信息和承載有效載荷。在每一幀中,節點都必須在自己的BC中發送FI信息,并根據鄰節點的FI和自己的信道使用情況及時更新FI信息。當BC信道提供的帶寬不能滿足業務的要求時,節點可以通過預約附加信道的方式占用其他空閑信道,以滿足業務要求。如果是點對點通信,節點還可以預約點對點(P2P,point—to—point)信道進行傳送,以實現相鄰一跳群中的時隙復用,提高信道的利用率。圖5顯示了節點交換FI信息的示例。

?
4.2.3 CSM CA和RR—AL OHA 的比較
對于常見自組網一般采用兩種類型的MAC協議:一種是基于CSMMCA的異步競爭式MAC協議,另一種是基于時隙的同步預約式MAC協議。
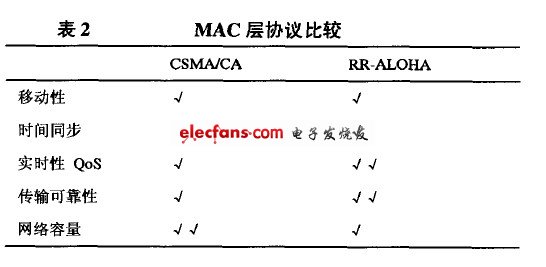
不過對于車載自組網的特殊性,預約式的同步MAC協議效果可能更好些。表2對CSMA/CA 和RR—ALOHA 這兩種MAC協議進行了簡單的比較。
這兩種MAC協議各有利弊,通過進一步分析,似乎RR—AL OHA更適合于在車載自組網中使用,但是在RR—ALOHA中不能忽視的一點是,節點通信范圍內的鄰居節點數不能超過1幀中的時隙數。
?
4.2.4 令牌環
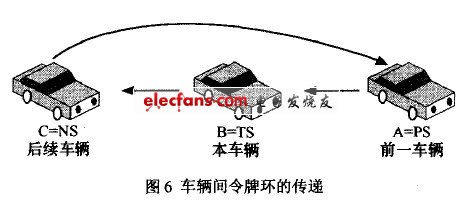
除了基于CSMA/CA和時隙類的MAC協議外,還有一些其他類型的MAC協議,如令牌環。在具備GPS系統的車輛問可以使用基于非競爭性的令牌環接入方式(如WTRP協議),以提高信道利用率,避免信道沖突,更能滿足車輛間安全預警通信的時延要求。在車載自組網中應用令牌環的主要思想:在廣播信道上通過令牌組成邏輯環來控制信道的接入,為表述方便,稱本車輛(對應通信網絡中的本地節點)為TS(this station);前一車輛(對應通信網絡中的上一節點)為PS(previous station);后續車輛(對應通信網絡中的后續節點)稱為NS(next smtion)。考慮實際車輛隊列中,設車輛A,B,C構成隊列,隊列內采用無線令牌環協議,三輛車組成邏輯令牌環,令牌傳遞順序為A—B—C—A。設某一時刻B為令牌擁有者,令B為TS,相應的A為PS,C為NS。網絡結構示意如圖6所示,圖中箭頭方向表示令牌傳遞方向,當車輛持有令牌后才能開始進行數據的發送,而那些沒有持有令牌的車輛只能進行數據的接受。當傳送完一定的數據后,令牌擁有者把令牌傳遞給后續車輛,開始下一輛車的數據傳送。
?
- 第 1 頁:車載自組網的發展與應用情況
- 第 2 頁:應用舉例
- 第 3 頁:?接入方式
- 第 4 頁:?路由協議
本文導航
非常好我支持^.^
(153) 97.5%
不好我反對
(4) 2.5%
相關閱讀:
- [電子說] 可自組網智能家居開關系統燈控制并遠程配置的ZigBee模塊! 2023-09-14
- [電子說] AnyMesh-BWL-2W自組網電臺20km空對地遠距離測試 2023-09-06
- [電子說] 人防維穩應急通信,寬帶無線指揮調度方案 2023-08-31
- [電子說] ANYMESH-一站多機功能驗證測試 2023-08-30
- [電子說] ANYMESH-自組網安全加密算法及策略與手段介紹 2023-08-29
- [電子說] 無人機自組網關鍵技術有哪些 2023-08-28
- [電子說] 寬帶跳頻抗干擾自組網技術及高性能跳頻自組網電臺介紹 2023-08-28
- [電子說] 用于車輛之間動態聯網的MESH無線自組網電臺 2023-08-25
( 發表人:葉子 )