?路由協議 - 車載自組網的發展與應用情況
由于車載網絡拓撲的頻繁變化,節點移動速度很快,路由技術成為了車載自組網中的重大挑戰之一。在早期實驗平臺中使用的是一些簡單洪泛路由技術。目前,在車載自組網中使用的路由協議大致可以分為3 類:
① 基于拓撲的路由(TBR,topology—based routing)協議;
②基于位置的路(PBR,position—based routing,)協議;
③基于地圖的路(MBR,map—based routing)協議,如圖7所示。

?
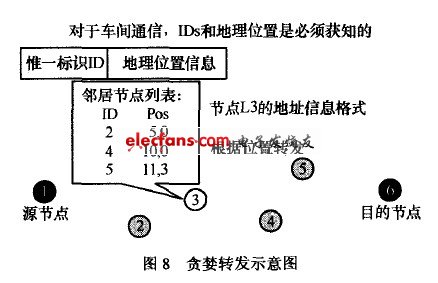
GPSR(greedy perimeter state—less Routing)是比較有名的利用地理位置來優化路由協議,基本思想是:節點在發送數據前不尋找路由,不保存路由表。移動節點直接根據位置信息(包括自己的、鄰節點的以及目的節點的位置信息)制定數據轉發決策。數據分組中通常攜帶目的節點的地理位置信息。網絡中相鄰節點問通過周期性廣播分組獲得其他節點的位置信息。源節點或中間節點根據這些位置信息,將數據分組傳送給一個或多個相對自己而言距離目的節點更近的鄰節點,如圖8所示。GPSR在高速公路上性能不錯,但是在城市環境中存在著缺陷。
?
空間感知路由協議SAR(spatialaware routing)是針對路由空洞障礙的進一步改進,也可以說是在GPSR路由協議的基礎上的進一步改進,基本思想是:建立一個網路節點組成的空問模型圖,模型圖中的點表示車輛網絡中的一些重要連接點(車輛、路邊設施等),邊表示連接點之問的連接。圖中的點是根據GIS中有用信息午提取出來,最后通過編寫一個地理數據文件(geographic data files)語法分析器,從空間模型圖中提取道路的相關信息。把源節點和目的節點的位置映射到空問模型中,然后利用圖論中的最短路經算法來計算源到目的節點的路徑。但是空間感知路由協議SAR存在一個缺點,空間模型建立是否準確,決定了路徑上是否有合適的轉發節點。
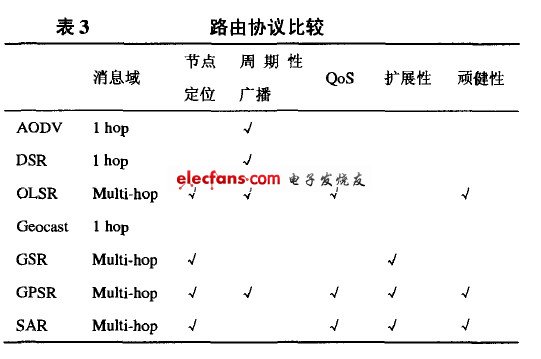
通過表3,對車載自組網中使用的路由技術進行一個橫向比較:
?
6 結語
隨著人們對個人通信要求的提高,人們越來越希望有一種更安全、高效率的方式移動到目的地,車載自組網將會是未來的重點發展方向,其中MAC層和路由層的設計將是車載自組網所面臨的最重大挑戰,MAC層需要解決的問題有無線信道劃分、分配和能力控制,向網絡層提供統一的服務,屏蔽物理層不同的信道控制方式,實現擁塞控制、優先級排隊、分組發送、確認、差錯控制和流量控制等;路由層的側重點在于如何建立完全分布式的、適合高速拓撲變化車載網絡的路由協議。最終整個車載自組網的目標是制定一個通信標準協議,使不同廠商的車輛之間都能實現自由通信。
- 第 1 頁:車載自組網的發展與應用情況
- 第 2 頁:應用舉例
- 第 3 頁:?接入方式
- 第 4 頁:?路由協議
本文導航
非常好我支持^.^
(153) 97.5%
不好我反對
(4) 2.5%
相關閱讀:
- [電子說] 可自組網智能家居開關系統燈控制并遠程配置的ZigBee模塊! 2023-09-14
- [電子說] AnyMesh-BWL-2W自組網電臺20km空對地遠距離測試 2023-09-06
- [電子說] 人防維穩應急通信,寬帶無線指揮調度方案 2023-08-31
- [電子說] ANYMESH-一站多機功能驗證測試 2023-08-30
- [電子說] ANYMESH-自組網安全加密算法及策略與手段介紹 2023-08-29
- [電子說] 無人機自組網關鍵技術有哪些 2023-08-28
- [電子說] 寬帶跳頻抗干擾自組網技術及高性能跳頻自組網電臺介紹 2023-08-28
- [電子說] 用于車輛之間動態聯網的MESH無線自組網電臺 2023-08-25
( 發表人:葉子 )