車載自組網(wǎng)的發(fā)展與應(yīng)用情況 - 全文
?
1引言
作為智能交通系統(tǒng)重要基礎(chǔ)之一的車輛網(wǎng)絡(luò)概念就是在這種需求背景下提出的。車載自組網(wǎng)是專門為車輛問通信而設(shè)計(jì)的自組織網(wǎng)絡(luò),它創(chuàng)造性地將自組網(wǎng)技術(shù)應(yīng)用于車輛間通信,使司機(jī)能夠在超視距的范圍內(nèi)獲得其他車輛的狀況信息(如車速、方向、位置、剎車板壓力等)和實(shí)時(shí)路況信息。車載自組網(wǎng)的設(shè)計(jì)目標(biāo)是建立一個(gè)車輛間通信的平臺(tái),不僅提高交通效率,還為司機(jī)的通行帶來可靠安全和多重便利,使旅行者更加舒適。在2003年I1ru—T的汽車通信標(biāo)準(zhǔn)化會(huì)議上,各國專家提出的車用自組織網(wǎng)絡(luò)(VANET,vehicle ad-hocnetworks)技術(shù)有望在2010年將交通事故帶來的損失降低50%。
2 車載自組網(wǎng)簡介
自組網(wǎng)是一種無線分布式結(jié)構(gòu),強(qiáng)調(diào)的是多跳、自組織、無中心的概念。因此可以把車載自組網(wǎng)(VANET,vehicle ad hoc networks)定義為一種快速移動(dòng)戶外通信網(wǎng)絡(luò)(fast moving outdoor commu—nication network),也有人把車載自組網(wǎng)稱為自組織交通信息系統(tǒng)(SOTIS,self-organizing traffic informationsystem)。車載自組網(wǎng)的基本思想是在一定通信范圍內(nèi)的車輛可以相互交換各自的車速、位置等信息和車載傳感器感知的數(shù)據(jù),并自動(dòng)的連接建立起一個(gè)移動(dòng)的網(wǎng)絡(luò)。節(jié)點(diǎn)的單跳通信范圍只有幾百米到一千米,每一個(gè)節(jié)點(diǎn)(車輛)不僅是一個(gè)收發(fā)器,同時(shí)還是一個(gè)路由器,因此采用多跳的方式把數(shù)據(jù)轉(zhuǎn)發(fā)給更遠(yuǎn)的車輛。
2.1 網(wǎng)絡(luò)結(jié)構(gòu)
整個(gè)車載自組網(wǎng)分為兩部分:車與車(V2V,vehicle to vhicle)和車與設(shè)施(V2I,vehicle toinfrastructure)。圖1顯示了車載自組網(wǎng)在真實(shí)環(huán)境中應(yīng)用的一個(gè)模型示意:

?
可以看到,衛(wèi)星通信系統(tǒng)分別為車載自組網(wǎng)提供全球定位服務(wù)(GPS,global positioning system)和數(shù)字多媒體服務(wù)(DMB,digital multimedia broad—casting)。車與車通信使車輛之間能夠通過多跳的方式進(jìn)行自動(dòng)互聯(lián),這好比車與車之間能夠像人一樣互相交談,起到提高車輛運(yùn)行的安全和疏導(dǎo)交通流量等作用。車載自組網(wǎng)除了可以單獨(dú)組網(wǎng)實(shí)現(xiàn)局部的通信外,還可以通過路燈、加油站等作為接入點(diǎn)的網(wǎng)關(guān)(gateway),連接到其他的固定或移動(dòng)通信網(wǎng)絡(luò)上,提供更為豐富的娛樂、車內(nèi)辦公等服務(wù)。在本文中,針對車載自組網(wǎng)的特點(diǎn)和技術(shù)難點(diǎn),主要討論車與車之間通信的自組網(wǎng)方式。
2.2 主要特點(diǎn)
車載自組網(wǎng)是極其特殊的移動(dòng)自組織網(wǎng)絡(luò),它同樣存在一般無線自組網(wǎng)所固有的問題,如隱藏點(diǎn)問題、暴露點(diǎn)問題、信道捕獲問題等,不過也帶有自身獨(dú)特的特性。車載自組網(wǎng)的主要特點(diǎn)包括:
① 由于節(jié)點(diǎn)高速移動(dòng)性(速度大致在5-42m/s之間),導(dǎo)致網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)變化快,路徑壽命短,例如平均速度為lOOkm/h的道路上,如果節(jié)點(diǎn)的覆蓋半徑為250m,則鏈路存在15s的概率僅為57%。
② 無線信道質(zhì)量不穩(wěn)定,受多種因素影響,其中包括路邊建筑、道路情況、車輛類型和車輛相對速度等。
③ 節(jié)點(diǎn)通過發(fā)動(dòng)機(jī)可以提供源源不斷的電力支持,車輛的承載空間也可以確保天線的尺寸和其他額外的通信設(shè)備,同時(shí)還具有強(qiáng)大的計(jì)算能力和存儲(chǔ)能力等。
④ 節(jié)點(diǎn)移動(dòng)具有一定的規(guī)律性,只能沿著車道單/雙向移動(dòng),具有一維性。
⑤ 道路的靜態(tài)形狀使得車輛移動(dòng)是受限制的,車輛軌道一般可預(yù)測。
⑥ GPS能夠?yàn)楣?jié)點(diǎn)提供精確定位和精準(zhǔn)時(shí)鐘信息,利于獲取自身位置信息和進(jìn)行時(shí)鐘同步。
⑦ GPS和電子地圖相結(jié)合,利用路徑規(guī)劃功能,將使車載自組網(wǎng)路由策略的實(shí)現(xiàn)變得更為簡單。
2.3 應(yīng)用舉例
車載自組網(wǎng)在交通運(yùn)輸中出現(xiàn),將會(huì)擴(kuò)展司機(jī)的視野與車載部件的功能,從而提高道路交通的安全與高效。典型的應(yīng)用包括:
① 行駛安全預(yù)警。利用車輛間相互交換狀態(tài)信息,通過車載自組網(wǎng)提前通告給司機(jī),建議司機(jī)根據(jù)情況作出及時(shí)、適當(dāng)?shù)鸟{駛行為,這便有效的提升了司機(jī)的注意力,提高駕駛的安全性。
② 協(xié)助駕駛。幫助駕駛員快速、安全的通過“盲區(qū)”,例如在高速路出/入口或交通十字路口處的車輛協(xié)調(diào)通行。
③ 分布式交通信息發(fā)布。改變傳統(tǒng)的基于中心式網(wǎng)絡(luò)結(jié)構(gòu)的交通信息發(fā)布形式,車輛從車載自組網(wǎng)中獲取實(shí)時(shí)交通信息,提高路況信息的實(shí)時(shí)性,例如,綜合出與自身相關(guān)的車流量狀況,更新電子地圖以便更高效地決定路徑規(guī)劃。
④ 基于通信的縱向車輛控制。通過車載自組網(wǎng),車輛能根據(jù)尾隨車輛和更多前邊視線范圍外的車輛相互協(xié)同行駛,這樣能夠自動(dòng)形成一個(gè)更為和諧的車輛行駛隊(duì)列,避免更多的交通事故。
3 物理層參數(shù)
由于車載自組網(wǎng)獨(dú)特的性質(zhì),決定了其對物理層的要求比較苛刻:要求在高速移動(dòng)的環(huán)境下具有較強(qiáng)的頑健I生,減少因高速移動(dòng)引起的信號(hào)突變所帶來的影響,尤其是在高速下產(chǎn)生的多普勒效應(yīng)等的影響;支持高速率傳輸,提供多跳連接(甚至是在節(jié)點(diǎn)密度比較小的情況下),保證足夠的信息交互;而且對于安全報(bào)警信息延遲要非常小,支持突發(fā)性數(shù)據(jù)流,保證其實(shí)時(shí)性;與MAC層協(xié)議接口相匹配;另外,需要工作在無需授權(quán)的頻段內(nèi),以保證其應(yīng)用普及。
目前國外所應(yīng)用的車載自組網(wǎng)系統(tǒng)所采用的物理層技術(shù)主要是基于802.1l(Wi—Fi) 標(biāo)準(zhǔn)和UTRA—TDD(TD—CDMA)技術(shù),例如CarTalk與FleetNet項(xiàng)目都采用了UTRA—TDD技術(shù),C2C聯(lián)盟則主張使用改進(jìn)后的802.1lb技術(shù)。通過表1,可以對802.1lb和UTRA—TDD在物理層中所采用的一些不同參數(shù)進(jìn)行簡單比較。

?
由上表可以看出802.1lb的性能要差很多,但是由于802.1lb無線模塊目前應(yīng)用普及、價(jià)格便宜、實(shí)現(xiàn)簡單,而且工作在2.4GHz的免費(fèi)頻段等特點(diǎn),廣泛被科研實(shí)驗(yàn)所采用:而UTRA—TDD技術(shù)實(shí)現(xiàn)復(fù)雜,造價(jià)較高,還有一些非技術(shù)因素阻礙其應(yīng)用。
所以說這2種技術(shù)各有長短。此外,目前在我國最為普及的GSM 移動(dòng)通信技術(shù),其穩(wěn)定的性能被大家所接受, 而支持自組織方式的GSM 網(wǎng)絡(luò)(A—GSM[301)是受Lucent技術(shù)公司資助,對下一代GSM蜂窩網(wǎng)中繼能力進(jìn)行研究的課題:該課題研究人員試圖在盡可能減少對現(xiàn)有GSM 系統(tǒng)改動(dòng)的基礎(chǔ)上,使移動(dòng)臺(tái)具有中繼功能,由此來增強(qiáng)GSM網(wǎng)絡(luò)的覆蓋能力。由此可見GSM 技術(shù)應(yīng)用在自組網(wǎng)中是可行的,其性能也完全符合車載自組網(wǎng)的要求,所以車載自組網(wǎng)物理層也可以嘗試采用GSM技術(shù)。
無論802.1 lb、UTRA—TDD還是GSM 技術(shù)都是一種中心式結(jié)構(gòu)的網(wǎng)絡(luò),將其應(yīng)用于分布式網(wǎng)絡(luò)在很多方面需要進(jìn)行改進(jìn)。首先,空中接口需要適應(yīng)高速動(dòng)態(tài)變化的網(wǎng)絡(luò)拓?fù)?將中心控制的無線媒介訪問機(jī)制修改成分布式的媒介訪問機(jī)制;修改由基站控制的無線資源管理機(jī)制為節(jié)點(diǎn)自行管理協(xié)同合作的機(jī)制;面對更為惡劣的多徑效應(yīng)、能量控制算法和時(shí)隙同步等問題。以時(shí)隙同步為例,它既不像在UTRA—TDD、GSM 終端設(shè)備接入基站時(shí)由基站負(fù)責(zé)進(jìn)行同步,也不像在802.1lb中AP定期地發(fā)送信標(biāo)(beacon)幀保持相同物理網(wǎng)中的工作站同步。在車載自組網(wǎng)中時(shí)隙同步問 可以通過引入GPS進(jìn)行粗略同步,再加上一些特定機(jī)制進(jìn)行精確同步,比如在幀中設(shè)計(jì)特定的同步時(shí)隙。無論是理論分析還是在實(shí)際的高速公路或城市道路中進(jìn)行的仿真測試,都能得出一個(gè)結(jié)論:
UTRA-TDD比IEEE 802.1lb具有更大的優(yōu)勢。
對于物理層除了技術(shù)因素外,還有一些非技術(shù)因素阻礙其選取,比如說占用的頻段。在國外,2003年,美國的聯(lián)邦通信委員會(huì)專門為車輛間通信劃分了一個(gè)75MHz(5.85—5.925GHz)的免費(fèi)頻帶帶寬用于專用短距離通信(DSRC,dedicated short rangcommunication),而歐洲的郵政電信組織(CEPT)也已經(jīng)為UTRA.TDD技術(shù)提供了免除執(zhí)照發(fā)放的2010到2020MHz頻段,日本的DEM02000項(xiàng)目采用的專用短程通信技術(shù)(DSRC)也有專門的免費(fèi)頻段。可見,在車載自組網(wǎng)技術(shù)發(fā)展比較好的國家都有一個(gè)免費(fèi)頻段供其使用,因此,在我國劃分一個(gè)供車載自組網(wǎng)使用的免費(fèi)頻段勢在必行,以利于其更好的在國內(nèi)推廣。
綜合以上物理層的特性,對于車載自組網(wǎng)物理層的選擇標(biāo)準(zhǔn)初步總結(jié)如下:
①適合節(jié)點(diǎn)高速移動(dòng),初步設(shè)計(jì)移動(dòng)速度上限為150km/h;
②通訊距離在lkm左右;
③帶寬在1Mbit/s左右;
④實(shí)時(shí)性強(qiáng),支持同步,傳輸延時(shí)足夠小;
⑤頻率最好是免費(fèi)頻段(可以考慮2.4GHz的ISM免費(fèi)頻段)。
4 MAC層協(xié)議
MAC協(xié)議是報(bào)文在信道上發(fā)送和接收的直接控制者,它的優(yōu)劣直接影響到極為有限的無線資源的使用效率,對車載自組網(wǎng)的性能起著決定性的作用。MAC層除了需要解決隱藏終端,暴露終端和資源分配的公平性等普遍問題外,車載自組網(wǎng)特定的應(yīng)用環(huán)境和業(yè)務(wù)需求是其要面臨的特殊問題:如車載終端移動(dòng)速度快,網(wǎng)絡(luò)的拓?fù)浣Y(jié)構(gòu)高度動(dòng)態(tài)變化,需要支持突發(fā)的優(yōu)先級(jí)高,實(shí)時(shí)性強(qiáng)的交通安全類業(yè)務(wù)應(yīng)用,許多實(shí)時(shí)業(yè)務(wù)需要以廣播形式發(fā)送等。因此,基于自組網(wǎng)的車載通信系統(tǒng)MAC協(xié)議需要具備以下特征:
①支持車輛高速移動(dòng)性;
②保證通信的實(shí)時(shí)性和可靠性;
③具有較好的可擴(kuò)展性;
④具有較高的帶寬利用率;
⑤采用全分布式自組網(wǎng)方式;
⑥為每個(gè)用戶提供公平的通信機(jī)會(huì);
⑦提供高效、及時(shí)的廣播機(jī)制。
4.1 幀結(jié)構(gòu)
由于目前所應(yīng)用的車載自組網(wǎng)物理層一般是基于802.11標(biāo)準(zhǔn)和UTRA.TDD技術(shù)的,因此建立在物理層之上的MAC層的幀結(jié)構(gòu)一般也是有兩類的。
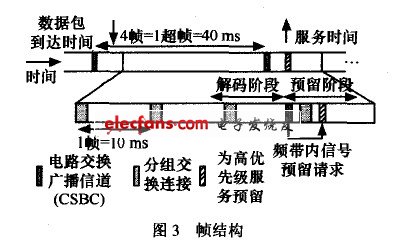
由于需要將中心式結(jié)構(gòu)的UTRA.TDD應(yīng)用到分布式系統(tǒng)中,所以要在很多方面做出調(diào)整和改進(jìn)。首先對MAC層的幀結(jié)構(gòu)進(jìn)行重新設(shè)計(jì),每一幀的時(shí)長為10ms,每一幀由15個(gè)時(shí)隙構(gòu)成,每4幀又構(gòu)成一個(gè)超級(jí)幀,如圖2所示。

?
為了避免在隨機(jī)信道接入機(jī)制下的保留請求沖突,一種電路交換廣播連接(CSBC,circuit.switched broadcast channe1)被引入,它主要用來作為信令目的。如果在幀中沒有足夠的容量來支撐數(shù)據(jù)的發(fā)送,節(jié)點(diǎn)就可以利用CSBC來發(fā)送額外容量保留請求,如圖3所示。
?
4.2 接入方式
MAC層主要是完成無線資源分布式仲裁和管理的工作,其接入方式首先需要考慮的是一個(gè)公平性的問題,可以從兩個(gè)角度進(jìn)行考慮:①從節(jié)點(diǎn)的角度出發(fā),力圖保證節(jié)點(diǎn)之間占用的信道帶寬相等。②從業(yè)務(wù)流的角度考慮,力圖保證業(yè)務(wù)流之間占用的信道帶寬相等。但是,不論從哪個(gè)角度考慮該問題,最終都?xì)w結(jié)為如何在MAC協(xié)議中確保每個(gè)網(wǎng)絡(luò)節(jié)點(diǎn)的公平接入。
4.2.1 802.11DCF
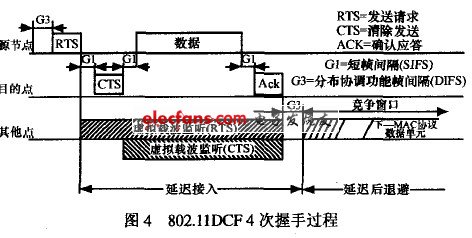
目前,應(yīng)用較為廣泛的自組網(wǎng)MA C 協(xié)議是IEEE 802.11DCFt2sl協(xié)議。該協(xié)議基于CSMA/CA,節(jié)點(diǎn)首先通過競爭進(jìn)行 rS,CTS信息的交互,在此基礎(chǔ)上實(shí)現(xiàn)信道的分配,過程如圖4 所示。
?
802.11DCF協(xié)議在本質(zhì)上是以較小的RTS,CTS分組的交互,分配較大的無線資源,從而提高無線資源的利用率。
圖中發(fā)送方在發(fā)送數(shù)據(jù)之前應(yīng)先發(fā)控制幀RTS;如果接收方收到RTS,在SIFS時(shí)間后用控制幀CTS對RTS進(jìn)行確認(rèn);發(fā)送方收到確認(rèn)的CTS,在等待SIFS時(shí)間后發(fā)數(shù)據(jù)包;接收方收到數(shù)據(jù)包,在等待SIFS時(shí)間后用ACK確認(rèn);發(fā)送方收到ACK后,數(shù)據(jù)包發(fā)送完畢。
然而,802.11DCF協(xié)議是為支持分組突發(fā)業(yè)務(wù)而設(shè)計(jì)的,它不支持實(shí)時(shí)業(yè)務(wù)。另外,802.11DCF協(xié)議采用的時(shí)間隨機(jī)退避機(jī)制不適用于同步網(wǎng)絡(luò)。
而車載自組網(wǎng)對數(shù)據(jù)的實(shí)時(shí)性要求很高,適合采用基于預(yù)約方式的同步MAC協(xié)議,因此基于競爭方式的802.11DCF不太適合在車載自組網(wǎng)中應(yīng)用。
4.2.2 RR—ALOHA
在車間通信中要求具備較多的是廣播特性,因此對MAC層的可靠性要求非常嚴(yán)格。目前,對無連接業(yè)務(wù)的可靠性保證研究不多,針對車載自組網(wǎng)的可靠廣播研究也很少,目前提出的方法有:在廣播中增加控制幀劃分路段轉(zhuǎn)發(fā)數(shù)據(jù)包等。為了實(shí)現(xiàn)上述的分布式接入策略,根據(jù)車載自組網(wǎng)的特點(diǎn)提出了一種新的隨機(jī)接入方式RR—ALOHA [ (reliable reservation AL OHA),該協(xié)議在R—ALOHA基礎(chǔ)上改進(jìn):
①解決了隱藏終端和暴露終端的問題;
② 通過每幀周期廣播幀信息(FI,frame information),使所有的鄰節(jié)點(diǎn)都知道每一個(gè)時(shí)隙的信道使用狀況,從而使RR—AL OHA協(xié)議能夠在車載自組網(wǎng)中正確運(yùn)行。FI是發(fā)送節(jié)點(diǎn)感知的前一幀的時(shí)隙狀態(tài)信息。RR—AL OHA 可以在不同的物理層標(biāo)準(zhǔn)下使用,尤其適合采用時(shí)隙結(jié)構(gòu)的物理層。當(dāng)有節(jié)點(diǎn)加入時(shí),先偵聽一幀的時(shí)間,然后選擇一個(gè)空閑時(shí)隙發(fā)送一個(gè)分組,來預(yù)約這個(gè)時(shí)隙。如果鄰節(jié)點(diǎn)正確接收到了該分組,則在它的FI中標(biāo)示出來。當(dāng)新加入的節(jié)點(diǎn)從一幀時(shí)間內(nèi)收到的所有FI中知道鄰節(jié)點(diǎn)都正確接受到分組時(shí),即認(rèn)為預(yù)約成功,從而將每幀的該時(shí)隙作為它的基本信道(BC,base channe1),直到節(jié)點(diǎn)離開網(wǎng)絡(luò),在這期間其他節(jié)點(diǎn)不能訪問該時(shí)隙。其中,BC 信道用于傳送FI、其他信令信息和承載有效載荷。在每一幀中,節(jié)點(diǎn)都必須在自己的BC中發(fā)送FI信息,并根據(jù)鄰節(jié)點(diǎn)的FI和自己的信道使用情況及時(shí)更新FI信息。當(dāng)BC信道提供的帶寬不能滿足業(yè)務(wù)的要求時(shí),節(jié)點(diǎn)可以通過預(yù)約附加信道的方式占用其他空閑信道,以滿足業(yè)務(wù)要求。如果是點(diǎn)對點(diǎn)通信,節(jié)點(diǎn)還可以預(yù)約點(diǎn)對點(diǎn)(P2P,point—to—point)信道進(jìn)行傳送,以實(shí)現(xiàn)相鄰一跳群中的時(shí)隙復(fù)用,提高信道的利用率。圖5顯示了節(jié)點(diǎn)交換FI信息的示例。

?
4.2.3 CSM CA和RR—AL OHA 的比較
對于常見自組網(wǎng)一般采用兩種類型的MAC協(xié)議:一種是基于CSMMCA的異步競爭式MAC協(xié)議,另一種是基于時(shí)隙的同步預(yù)約式MAC協(xié)議。
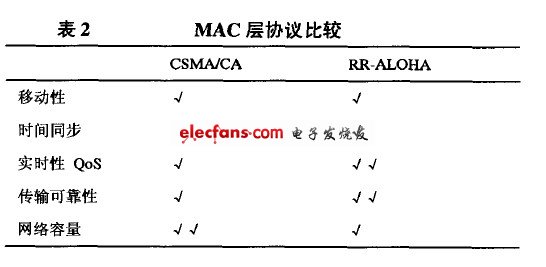
不過對于車載自組網(wǎng)的特殊性,預(yù)約式的同步MAC協(xié)議效果可能更好些。表2對CSMA/CA 和RR—ALOHA 這兩種MAC協(xié)議進(jìn)行了簡單的比較。
這兩種MAC協(xié)議各有利弊,通過進(jìn)一步分析,似乎RR—AL OHA更適合于在車載自組網(wǎng)中使用,但是在RR—ALOHA中不能忽視的一點(diǎn)是,節(jié)點(diǎn)通信范圍內(nèi)的鄰居節(jié)點(diǎn)數(shù)不能超過1幀中的時(shí)隙數(shù)。
?
4.2.4 令牌環(huán)
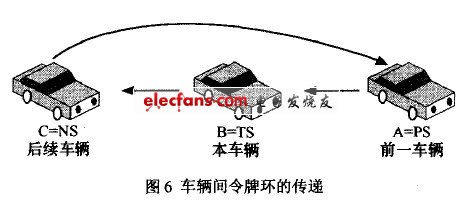
除了基于CSMA/CA和時(shí)隙類的MAC協(xié)議外,還有一些其他類型的MAC協(xié)議,如令牌環(huán)。在具備GPS系統(tǒng)的車輛問可以使用基于非競爭性的令牌環(huán)接入方式(如WTRP協(xié)議),以提高信道利用率,避免信道沖突,更能滿足車輛間安全預(yù)警通信的時(shí)延要求。在車載自組網(wǎng)中應(yīng)用令牌環(huán)的主要思想:在廣播信道上通過令牌組成邏輯環(huán)來控制信道的接入,為表述方便,稱本車輛(對應(yīng)通信網(wǎng)絡(luò)中的本地節(jié)點(diǎn))為TS(this station);前一車輛(對應(yīng)通信網(wǎng)絡(luò)中的上一節(jié)點(diǎn))為PS(previous station);后續(xù)車輛(對應(yīng)通信網(wǎng)絡(luò)中的后續(xù)節(jié)點(diǎn))稱為NS(next smtion)。考慮實(shí)際車輛隊(duì)列中,設(shè)車輛A,B,C構(gòu)成隊(duì)列,隊(duì)列內(nèi)采用無線令牌環(huán)協(xié)議,三輛車組成邏輯令牌環(huán),令牌傳遞順序?yàn)锳—B—C—A。設(shè)某一時(shí)刻B為令牌擁有者,令B為TS,相應(yīng)的A為PS,C為NS。網(wǎng)絡(luò)結(jié)構(gòu)示意如圖6所示,圖中箭頭方向表示令牌傳遞方向,當(dāng)車輛持有令牌后才能開始進(jìn)行數(shù)據(jù)的發(fā)送,而那些沒有持有令牌的車輛只能進(jìn)行數(shù)據(jù)的接受。當(dāng)傳送完一定的數(shù)據(jù)后,令牌擁有者把令牌傳遞給后續(xù)車輛,開始下一輛車的數(shù)據(jù)傳送。
?
5 路由協(xié)議
由于車載網(wǎng)絡(luò)拓?fù)涞念l繁變化,節(jié)點(diǎn)移動(dòng)速度很快,路由技術(shù)成為了車載自組網(wǎng)中的重大挑戰(zhàn)之一。在早期實(shí)驗(yàn)平臺(tái)中使用的是一些簡單洪泛路由技術(shù)。目前,在車載自組網(wǎng)中使用的路由協(xié)議大致可以分為3 類:
① 基于拓?fù)涞穆酚?TBR,topology—based routing)協(xié)議;
②基于位置的路(PBR,position—based routing,)協(xié)議;
③基于地圖的路(MBR,map—based routing)協(xié)議,如圖7所示。

?
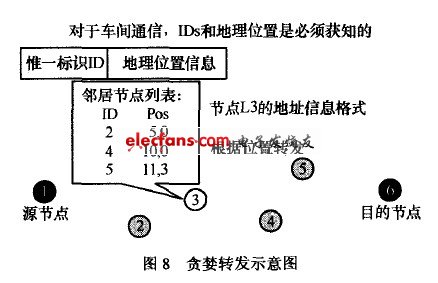
GPSR(greedy perimeter state—less Routing)是比較有名的利用地理位置來優(yōu)化路由協(xié)議,基本思想是:節(jié)點(diǎn)在發(fā)送數(shù)據(jù)前不尋找路由,不保存路由表。移動(dòng)節(jié)點(diǎn)直接根據(jù)位置信息(包括自己的、鄰節(jié)點(diǎn)的以及目的節(jié)點(diǎn)的位置信息)制定數(shù)據(jù)轉(zhuǎn)發(fā)決策。數(shù)據(jù)分組中通常攜帶目的節(jié)點(diǎn)的地理位置信息。網(wǎng)絡(luò)中相鄰節(jié)點(diǎn)問通過周期性廣播分組獲得其他節(jié)點(diǎn)的位置信息。源節(jié)點(diǎn)或中間節(jié)點(diǎn)根據(jù)這些位置信息,將數(shù)據(jù)分組傳送給一個(gè)或多個(gè)相對自己而言距離目的節(jié)點(diǎn)更近的鄰節(jié)點(diǎn),如圖8所示。GPSR在高速公路上性能不錯(cuò),但是在城市環(huán)境中存在著缺陷。
?
空間感知路由協(xié)議SAR(spatialaware routing)是針對路由空洞障礙的進(jìn)一步改進(jìn),也可以說是在GPSR路由協(xié)議的基礎(chǔ)上的進(jìn)一步改進(jìn),基本思想是:建立一個(gè)網(wǎng)路節(jié)點(diǎn)組成的空問模型圖,模型圖中的點(diǎn)表示車輛網(wǎng)絡(luò)中的一些重要連接點(diǎn)(車輛、路邊設(shè)施等),邊表示連接點(diǎn)之問的連接。圖中的點(diǎn)是根據(jù)GIS中有用信息午提取出來,最后通過編寫一個(gè)地理數(shù)據(jù)文件(geographic data files)語法分析器,從空間模型圖中提取道路的相關(guān)信息。把源節(jié)點(diǎn)和目的節(jié)點(diǎn)的位置映射到空問模型中,然后利用圖論中的最短路經(jīng)算法來計(jì)算源到目的節(jié)點(diǎn)的路徑。但是空間感知路由協(xié)議SAR存在一個(gè)缺點(diǎn),空間模型建立是否準(zhǔn)確,決定了路徑上是否有合適的轉(zhuǎn)發(fā)節(jié)點(diǎn)。
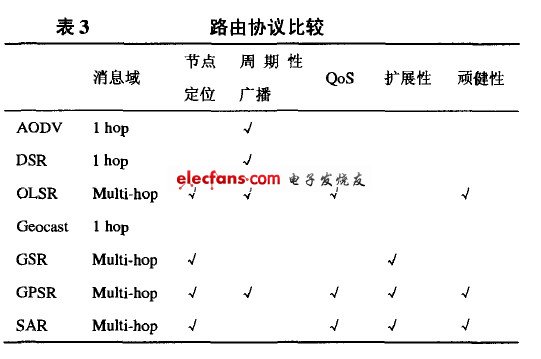
通過表3,對車載自組網(wǎng)中使用的路由技術(shù)進(jìn)行一個(gè)橫向比較:
?
6 結(jié)語
隨著人們對個(gè)人通信要求的提高,人們越來越希望有一種更安全、高效率的方式移動(dòng)到目的地,車載自組網(wǎng)將會(huì)是未來的重點(diǎn)發(fā)展方向,其中MAC層和路由層的設(shè)計(jì)將是車載自組網(wǎng)所面臨的最重大挑戰(zhàn),MAC層需要解決的問題有無線信道劃分、分配和能力控制,向網(wǎng)絡(luò)層提供統(tǒng)一的服務(wù),屏蔽物理層不同的信道控制方式,實(shí)現(xiàn)擁塞控制、優(yōu)先級(jí)排隊(duì)、分組發(fā)送、確認(rèn)、差錯(cuò)控制和流量控制等;路由層的側(cè)重點(diǎn)在于如何建立完全分布式的、適合高速拓?fù)渥兓囕d網(wǎng)絡(luò)的路由協(xié)議。最終整個(gè)車載自組網(wǎng)的目標(biāo)是制定一個(gè)通信標(biāo)準(zhǔn)協(xié)議,使不同廠商的車輛之間都能實(shí)現(xiàn)自由通信。
- 第 1 頁:車載自組網(wǎng)的發(fā)展與應(yīng)用情況
- 第 2 頁:應(yīng)用舉例
- 第 3 頁:?接入方式
- 第 4 頁:?路由協(xié)議
本文導(dǎo)航
非常好我支持^.^
(153) 97.5%
不好我反對
(4) 2.5%
相關(guān)閱讀:
- [電子說] 可自組網(wǎng)智能家居開關(guān)系統(tǒng)燈控制并遠(yuǎn)程配置的ZigBee模塊! 2023-09-14
- [電子說] AnyMesh-BWL-2W自組網(wǎng)電臺(tái)20km空對地遠(yuǎn)距離測試 2023-09-06
- [電子說] 人防維穩(wěn)應(yīng)急通信,寬帶無線指揮調(diào)度方案 2023-08-31
- [電子說] ANYMESH-一站多機(jī)功能驗(yàn)證測試 2023-08-30
- [電子說] ANYMESH-自組網(wǎng)安全加密算法及策略與手段介紹 2023-08-29
- [電子說] 無人機(jī)自組網(wǎng)關(guān)鍵技術(shù)有哪些 2023-08-28
- [電子說] 寬帶跳頻抗干擾自組網(wǎng)技術(shù)及高性能跳頻自組網(wǎng)電臺(tái)介紹 2023-08-28
- [電子說] 用于車輛之間動(dòng)態(tài)聯(lián)網(wǎng)的MESH無線自組網(wǎng)電臺(tái) 2023-08-25
( 發(fā)表人:葉子 )