? SLAM 背后的核心思想是讓機器人或自主系統能夠探索未知環境并創建該環境的地圖,同時確定其在生成....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 11-16 10:57
?242次閱讀
概述 YOLOv10 是由清華大學研究人員利用 Ultralytics Python 軟件包開發的,....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 11-16 10:23
?207次閱讀

閾值的基本概念是為了簡化圖像以進行分析。當我們將圖像轉換為灰度圖像時,必須記住灰度圖像仍然至少有25....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 11-16 10:16
?173次閱讀
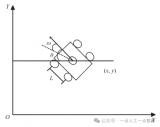
摘要: 該文對多無人智能車以領航-跟隨法在復雜環境下運動的編隊控制問題進行了探討,通過采用閉環控制律....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 11-16 10:12
?194次閱讀
今天,給大家分享一篇來自知乎的一篇關于目標檢測相關的一些內容,
本文基于Pytorch進行編寫....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 11-14 16:39
?119次閱讀

摘要:小倍率大視場的雙遠心物鏡具有低畸變、大景深的優點,在機器視覺工業在線檢測領域應用廣泛。根據雙遠....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 11-14 16:33
?173次閱讀

? 背景介紹 機器視覺系統由圖像獲取,預處理和分析模塊組成,這些模塊打算像人類視覺系統一樣執行檢測,....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 11-14 11:38
?207次閱讀

在研究機器視覺算法之前,我們需要先了解機器視覺應用中涉及的基本數據結構。Halcon數據結構主要有圖....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 11-14 10:20
?164次閱讀

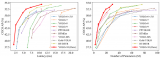
本文對近年來提出的主動學習圖像分類算法進行了詳細綜述,并根據所用樣本數據處理及模型優化方案,將現有算....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 11-14 10:12
?134次閱讀

來自中國清華大學的研究人員推出了YOLOv10,這是一種具有卓越進步的創新模型,展示了在計算機視覺領....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 11-13 17:12
?403次閱讀
一、文章概述 1.1 摘 要 即時定位與地圖構建(simultaneous localization....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 11-12 10:30
?260次閱讀

目標檢測在計算機視覺領域中具有重要意義。YOLOv5(You Only Look One-level....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 11-11 10:38
?374次閱讀

MTF測試是價值中立的量化工具,分數則否
業余攝影玩家們對手邊的器材,多少都有一點好奇心,總想....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 11-11 10:36
?360次閱讀

車牌識別作為現代化智能交通系統中重要的環節,對提升路網效率以及緩解城市交通壓力等問題具有重要的社會意....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 11-11 10:29
?117次閱讀

航空建筑深度估計是三維數字城市重建中的一項重要任務,基于深度學習的多視圖立體(MVS)方法在該領域取....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 11-07 10:16
?137次閱讀

下面是一個關于使用Python在幾行代碼中分析城市輪廓線的快速教程。
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 11-07 10:14
?140次閱讀

YOLO長期以來一直是目標檢測任務的首選模型之一。它既快速又準確。此外,其API簡潔易用。運行訓練或....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 11-05 17:15
?433次閱讀
點云是世界的一種非結構化三維數據表示,通常由激光雷達傳感器、立體相機或深度傳感器采集。它由一系列單個....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 10-29 09:21
?130次閱讀
本文我們將總結5種搭建開源大語言模型服務的方法,每種都附帶詳細的操作步驟,以及各自的優缺點。
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 10-29 09:17
?129次閱讀
LinK3D的核心思想和基于我們的LinK3D的兩個LiDAR掃描的匹配結果。綠色線是有效匹配。當前....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 04-30 12:55
?524次閱讀

為了更清晰地學習Pytorch中的激活函數,并對比它們之間的不同,這里對最新版本的Pytorch中的....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 04-30 09:26
?499次閱讀

卡爾曼濾波以及其擴展算法能夠應用于目標狀態估計,如果這個目標是行人,那么就是行人狀態估計(或者說行人....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 04-29 09:46
?821次閱讀

多目標跟蹤是計算機視覺領域中的一個重要任務,它旨在從視頻或圖像序列中準確地檢測和跟蹤多個移動目標。不....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 04-28 09:42
?1678次閱讀

Linux為視頻采集設備制定了標準的V4L2接口,并在內核中實現了其基礎框架V4L2 Core。用戶....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 04-25 14:41
?1183次閱讀

去模糊算法對三維圖像堆棧的每個二維平面進行操作。最近鄰算法是最常見的去模糊技術,其通過模糊相鄰平面(....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 04-24 11:43
?530次閱讀
深度學習系統的優勢在于,它們會隨著訓練數據的增多而變得更好。為了維護一個即使在復雜情況下也能表現良好....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 04-24 10:17
?581次閱讀
我們習慣從圖像中選取比較有代表性的點,然后,在此基礎上,討論相機位姿估計問題,以及這些點的定位問題。....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 04-19 11:41
?608次閱讀
在train.py中,定義從何處收集訓練數據。我們應該將20%的數據分開以自動用于驗證。我們還定義了....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 04-15 10:00
?547次閱讀

ORB-SLAM是一種基于特征的單目視覺SLAM系統,廣泛用于實時三維地圖構建和機器人定位。該系統使....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 04-08 10:17
?2619次閱讀

在Roofline模型可以直觀展示一張曲線圖,其中x軸表示AI(Arithmetic Intensi....
![的頭像]() 新機器視覺 發表于
新機器視覺 發表于 04-07 15:32
?919次閱讀




 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1

