機器視覺系統(tǒng)的基本原理 機器視覺技術(shù)的發(fā)展現(xiàn)狀和應用
如今,中國正成為世界機器視覺發(fā)展最活躍的地區(qū)之一,應用范圍涵蓋了工業(yè)、農(nóng)業(yè)、醫(yī)藥、軍事、航天、氣象、....

關(guān)于貝葉斯概念進行形式化的建模和推理
在統(tǒng)計學中,通常不會明確地為所有的現(xiàn)有經(jīng)驗附加條件,因為它是可以假設(shè)的。出于這個原因,在本書中,我們....

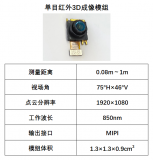
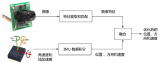
以單顆CMOS攝像頭重構(gòu)三維場景,維悟光子發(fā)布單目紅外3D成像模組
硬件系統(tǒng)的輕量化和降本是3D視覺市場演進的必然趨勢。維悟光子通過底層原理的創(chuàng)新,僅利用單目CMOS相....

基于Python實現(xiàn)隨機森林算法
機器學習算法是數(shù)據(jù)挖掘、數(shù)據(jù)能力分析和數(shù)學建模必不可少的一部分,而隨機森林算法和決策樹算法是其中較為....



關(guān)于數(shù)據(jù)挖掘的十種算法原理講解
數(shù)據(jù)挖掘主要分為三類:分類算法、聚類算法和相關(guān)規(guī)則,基本涵蓋了當前商業(yè)市場對算法的所有需求。這三類包....

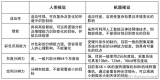
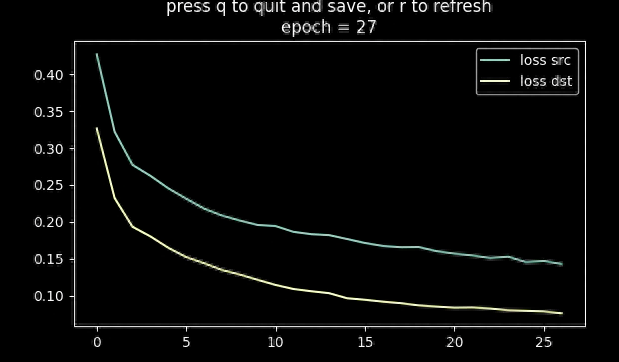
使用Pytorch和OpenCV實現(xiàn)視頻人臉替換
本文將分成3個部分,第一部分從兩個視頻中提取人臉并構(gòu)建標準人臉數(shù)據(jù)集。第二部分使用數(shù)據(jù)集與神經(jīng)網(wǎng)絡(luò)一....




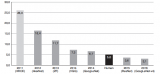
機器學習迅速發(fā)展,邊緣設(shè)備實現(xiàn)視覺AI應用
這個重大發(fā)展是一個轉(zhuǎn)折點。從那時起,深度神經(jīng)網(wǎng)絡(luò)在性能/精度兩個方面不斷迎來巨大進展。2015年Re....
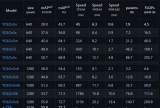
YOLOv5網(wǎng)絡(luò)結(jié)構(gòu)訓練策略詳解
前面已經(jīng)講過了Yolov5模型目標檢測和分類模型訓練流程,這一篇講解一下yolov5模型結(jié)構(gòu),數(shù)據(jù)增....
機器視覺應用項目的文檔應包括哪些
一、組織結(jié)構(gòu) 機器視覺應用項目涵蓋了光、機、電、液、氣、軟件、網(wǎng)絡(luò)、數(shù)據(jù)庫等多種技術(shù),項目管理繁瑣且....

在Windows電腦上配置了一個深度學習環(huán)境!
而對于 Windows 操作系統(tǒng),沒有多少文章詳細解釋這一過程。所以我打算自己來試試。這些天,經(jīng)過多....
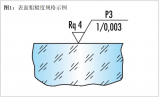
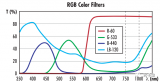
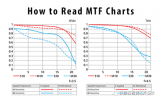
分辨率單位、換算及鏡頭與感光器像素的匹配
常用于表示 相機的攝影分辨率(是指鏡頭和相機的綜合分辨率), 每像高最多可以分辨多少條線數(shù) ; 舉例....

路徑規(guī)劃算法實現(xiàn)原理
本文會用matlab實現(xiàn)Dijkstra算法,并且會分享一些函數(shù)用法的鏈接,也是本人學習得來,供大家....






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)