完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
電子發燒友網技術文庫為您提供最新技術文章,最實用的電子技術文章,是您了解電子技術動態的最佳平臺。
相對于一般的工業機器人及家用服務機器人,特種機器人的工作環境和作業條件更為復雜,對機器人結構和功能也提出了更高的要求。因此,未來特種機器人領域將呈現出更多的創新和發展。...

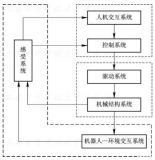
內部傳感器主要用于監測機器人的內部狀態,如位置、速度和加速度,而外部傳感器則專注于捕捉距離、聲音、光線和觸覺等機器人外部環境的信息。...
掃地機器人大概可以分為以下核心部分:主要包含主控芯片、傳感器芯片、電源管理芯片、WiFi芯片、存儲芯片和視覺芯片等。...

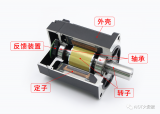
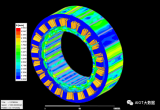
機器人關節要求電機體積小、扭矩大、響應快。而無框力矩電機僅由轉子和定子組成,體積小,同時具有較高的功率,低轉速情況下能夠輸出更大扭矩,更符合人形機器人的需求。...
與ROS1不同的是,ROS2誕生的目的就是為了讓更多機器人使用,所以在設計上更加符合技術的發展方向,也運用了很多最近的技術框架。...
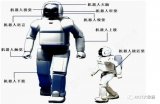
人形機器人集成人工智能、高端制造、新材料等先進技術,有望成為繼計算機、智能手機、新能源汽車后的顛覆性產品,將深刻變革人類生產生活方式,重塑全球產業發展格局。...

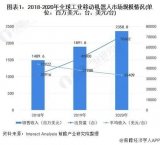
隨著人工智能時代的到來,“人形機器人+”正被視為未來數字化、智能化背景下,人工智能應用的終極賽道。首先來關注“人形機器人產業”。...
人形機器人作為機器人產業中重要的一環,其有著獨特的技術和功能,廣泛應用于教育、科研、服務、娛樂和工業等領域,帶來了前所未有的便利和效率。...

根據任務量的不同,調度系統會調整執行任務的移動機器人數量。在任務較少的時段,以不影響交期為前提,將任務集中分配到一組機器人上,以最小化完成所有任務...

機器人的誕生地在美國,1962年美國研制出世界上第一臺工業機器人,經過30多年的發展,美國現已成為世界上的機器人強國之一,基礎雄厚,技術先進。綜觀它的發展史,道路是曲折不平坦的。...
特種機器人工作環境的多樣性和復雜性,它不可能像工業領域的機器人那樣總是具有良好結構化的或抑制的環境,其使用環境的有關信息往往是多義、不完全或不準確的,而且可能隨著時間改變。...

人形機器人具備類似人類的感知、決策、行為以及擬人化的移動特性,從外觀上更加容易被使用者接受并產生親切感,因此能夠在人類所在的環境中與人類和諧相處,協助人類完成復雜和多樣的工作。...
減速器、伺服電機與控制器被認為是機器人三大核心零部件,整體來看,工業機器人的總體成本中,核心零部件成本占比接近70% ,其中減速器( RV減速器和諧波減速器)占比最大約35% ,國產化程度最低,是制約我國機器人產業發展的核心關鍵。...

機器人在每個工作序列和維護序列中的序列開始處查詢選擇制動器測試、選擇校準測試和服務程序請求。如果存在選擇或請求,就執行相應的功能。在執行之后重新重置選擇或請求,并且將序列處理完畢。...

在機器人零點校正時,軸被移到一個定義的機械位置,即所謂機械零位。如果機器人在這機械零位, 那么每個軸的絕對傳感器值被存儲。零點標定目的是使機器人各軸的軸角度與連接在各軸電機上的絕對值編碼器的脈沖計數值對應起來的操作。具體而言,是為了求取零度姿勢的脈沖計數值的操作。...

關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1




