完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
電子發燒友網技術文庫為您提供最新技術文章,最實用的電子技術文章,是您了解電子技術動態的最佳平臺。
Pollard的并聯機構 1962年,Gough發明了一種基于并聯機構的六自由度輪胎檢測裝置; 并聯機器人 1965年,Stewart首次對Gough發明的這種機構進行了機構學意義上的研究,并將其推廣應用為飛行模擬器的運動產生裝置,這種機構也是目前應用最廣的并聯機構,被稱為Gough-Stewa...
ROS 導航堆棧對于移動機器人從一個地方移動到另一個地方是強大的可靠。 導航堆棧的工作是通過處理來自測距、傳感器和環境圖的數據來產生讓機器人執行的安全路徑。...

拆卸步驟 : 1.將機器人置于所有軸0度的位置(特殊情況也可以置于其他姿態),做好MC備份和鏡像備份,然后斷開控制柜的電源 2.從機器人底座的配線板拆除控制柜側的電纜...

大地坐標系:大地坐標系是以大地作為參考的直角坐標系。在多個機器人聯動的和帶有外軸的機器人會用到,90%的大地坐標系與基坐標系是重合的。但是在以下兩種情況大地坐標系與基坐標系不重合。...

那么什么是標定呢?標定(calibration)包含兩方面的意思:一是指使用標準的計量儀器對所使用儀器或設備的準確度(精度)進行檢測,確認是否符合標準;二是校準,消除誤差。...

人形機器人新增更多電機需求,伺服電機和步進電機均具備適配性。 未來人形機器人單臺電機用量有望超40個,而伺服電機是主要配置,包括四肢及軀干,占據大部分用量份額。...

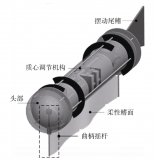
傳統機器人比較僵化,通常不適合執行精細任務或近距離與人類互動,而軟體機器人的靈活性和柔順性降低了人機交互過程中的潛在風險,并適應更廣泛的任務。...

控制柜 (CCU)包含兩塊電路板 (CIB 控制柜接口板和 PMB 電源管理板),是機器人控制系統所有組件的配電裝置和通訊接口。所有數據通過內部通訊傳輸給控制系統,并在那里繼續處理。...

一個帶有分割掩碼的輸入RGB-D圖像被提供給兩個神經網絡,分別產生一個6自由度的抓取姿勢和一個物體的3D點云重建。通過將抓取姿勢投影到點云中最近的點來優化抓取姿勢,從而產生最終的輸出抓取。...

工位背景:機器人帶抓手抓件,將抓手放到工位里,然后PLC和夾具將機器人抓手固定,機器人于抓手脫開,其他機器人開始焊接,工作結束后機器人在去抓抓手,離開工位,再去抓件。...

作為現代倉儲物流應用中的重要一環,越來越多的自主移動機器人AMR在貨物運輸中投入使用,AMR能自動化地實現貨物在工位之間的智能化搬運。...
機器人控制器由機器人控制器硬件和機器人控制器軟件組成。機器人控制器的軟件部分是工業機器人的“心臟”,隨著科技的發展,工業機器人從下位機到上位機的應用軟件方面都有了不同程度的研究成果。...

電動機是將電能轉換為機械能的裝置,反之,他也具有將旋轉機械能轉換為電能的發電功能。換言之,伺服電機是一種能量轉換裝置,可將電能轉換為機械能,同時也能通過其反過程來達到制動的目的。...
帶有RFID安全導航功能的重載AMR,使該公司能夠為倉庫構建一個完整的、降低勞動力成本的解決方案,從而在提高物流和倉儲設施的準確性和清潔度的同時,還可以緩解當今勞動力短缺的挑戰。...
團隊通過樣機的航行實驗研究了不同的運動參數下潛水器的推進性能,該機器魚可以在1Hz的撲動頻率下以0.18m/s的速度游動。2022年,中國科學院的喻俊志等研制了一款后掠角可變的MPF仿蝠鲼機器魚。該...
機器人的基本架構通常包括中央處理器 (CPU)、電源/電池管理單元、電池充電器、無線通信 (COM) 模塊、人機界面 (HMI)、傳感器及驅動模塊(有刷和無刷電機)。那么,服務機器人的核心技術到底有哪些呢?...

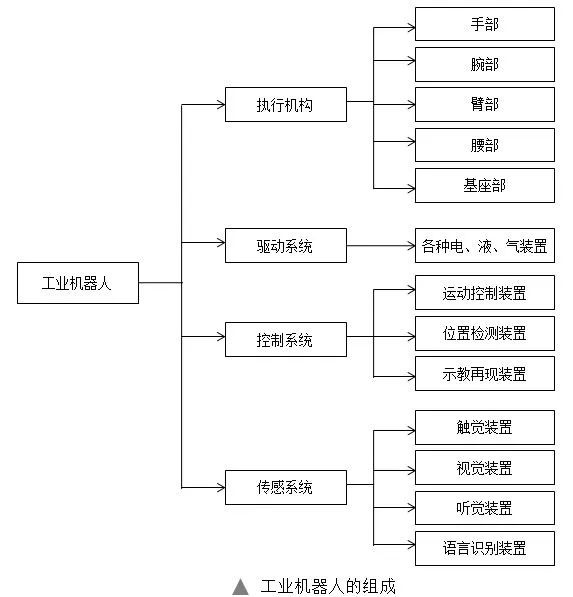
機器人控制系統是機器人的大腦,是決定機器人功用和功能的主要要素。控制系統是按照輸入的程序對驅動系統和實行機構收回指令信號,并進行控制。工業機器人控制技術的主要任務便是控制工業機器人在工作空間中的活動范圍、姿勢和軌跡、動作的時間等。具有編程簡單、軟件菜單操縱、友好的人機交互界面、在線操縱提示和運用方便...
庫卡機器人的安全信號與IO模塊是相互獨立的,即安全信號不是通過IO信號接入到機器人里。安全信號主要是指:急停、安全門等屬于機器人安全控制類的信號。...

關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1




