磁阻效應支持汽車內的多種傳感器應用。磁阻傳感器主要用來測量機械系統的速度和角度。這樣,磁阻傳感器就成為電氣元件、磁性元件和機械元件所組成的復雜系統的一部分。因為所有元件都會影響系統的反應,所以在規劃系統及其操作時要非常重視對整個系統的仿真。下面重點討論這種系統的建模和仿真。
產生磁場的永磁體的機械設計和選擇會在很大程度上影響測量數據的獲取。因此,在部署整個系統之前使用仿真技術進行深入分析非常重要,以確保達到目標功能并降低成本。因此,在前期開發過程中建立系統模型,之后用于支持后續產品的開發,對于解決設計過程中產生的這類問題也能發揮重要作用。下文將探討新型速度傳感器的整體系統建模和仿真。
?
圖 1 AMR 傳感器系統包含兩個封裝
?
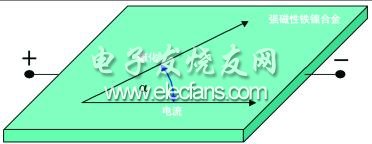
圖 2 各向異性磁阻效應
現代傳感器系統主要由兩個元件組成 —基本傳感器和信號處理專用集成電路 (ASIC)(圖 1)。現已證明,后來由 Lord Klevin 于 1857 年發現的各向異性磁阻效應特別適用于檢測磁場。首先考慮通常具有多種磁疇結構的鐵磁性材料。這些稱之為韋斯磁疇的結構,其內部磁化的方向彼此不同。如果將這種材料平鋪為一薄層,那么磁化矢量處于材料層平面方向。另外,可較精確地假設只存在一個磁疇。當這種元件暴露于外部磁場中時,后者會改變內部磁化矢量的方向。如果同時一股電流通過該元件,就會產生電阻(圖 2),這取決于電流和磁化之間的角度。當電流和磁化方向彼此成直角時,電阻最小,當二者平行時,電阻最大。電阻變化的大小取決于材料。鐵磁性材料的性質也決定對溫度的依賴性。電阻最大變化為 2.2% 并且對溫度變化反應良好的最佳合金是 81% 的鎳和 19% 的鐵組成的合金。恩智浦所有傳感器系統中的基本傳感器都采用這種強磁鐵鎳合金。在惠斯登電橋電路中單獨配置幾個 AMR 電阻,以增強輸出信號并改善溫度反應特性。此電路也可在制造過程中進行微調。圖 3 顯示如何在裸片上配置 AMR 元件。
確定速度的裝置多半由兩個組件組成:編碼器輪和傳感器系統。編碼器輪可以是主動式或被動式。主動輪已磁化,因此 MR 傳感器可檢測北極和南極之間的變化。如果是被動輪,則由一種齒狀結構代替磁化。如圖 1 所示,傳感器頭上也必須有一塊用于產生磁場的永磁體。接下來,我們只討論因公差極小而著稱的被動編碼器輪。當傳感器對稱地面對一個齒或者被動輪兩齒之間的空隙時,這不會使 AMR 元件的磁化矢量產生任何偏斜。忽略外部噪聲場并考慮橋電路時,輸出信號獲得零值。然而,如果傳感器頭處于齒邊緣前面,則磁輸入信號達到極值。齒/空隙或空隙/齒切換類型的函數結果與磁輸入信號正弦曲線的最小值或最大值非常接近。